 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructured Latent Variable Models for Articulated Object Interaction
May 26, 2023



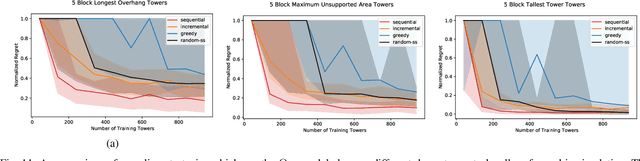
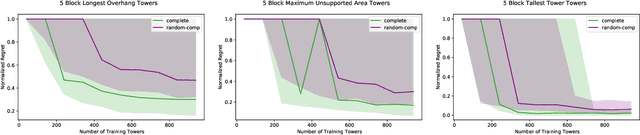
In this paper, we investigate a scenario in which a robot learns a low-dimensional representation of a door given a video of the door opening or closing. This representation can be used to infer door-related parameters and predict the outcomes of interacting with the door. Current machine learning based approaches in the doors domain are based primarily on labelled datasets. However, the large quantity of available door data suggests the feasibility of a semisupervised approach based on pretraining. To exploit the hierarchical structure of the dataset where each door has multiple associated images, we pretrain with a structured latent variable model known as a neural statistician. The neural satsitician enforces separation between shared context-level variables (common across all images associated with the same door) and instance-level variables (unique to each individual image). We first demonstrate that the neural statistician is able to learn an embedding that enables reconstruction and sampling of realistic door images. Then, we evaluate the correspondence of the learned embeddings to human-interpretable parameters in a series of supervised inference tasks. It was found that a pretrained neural statistician encoder outperformed analogous context-free baselines when predicting door handedness, size, angle location, and configuration from door images. Finally, in a visual bandit door-opening task with a variety of door configuration, we found that neural statistician embeddings achieve lower regret than context-free baselines.
Robotic Planning under Uncertainty in Spatiotemporal Environments in Expeditionary Science
Jun 03, 2022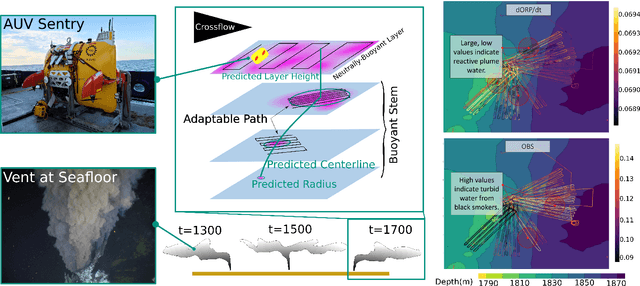
In the expeditionary sciences, spatiotemporally varying environments -- hydrothermal plumes, algal blooms, lava flows, or animal migrations -- are ubiquitous. Mobile robots are uniquely well-suited to study these dynamic, mesoscale natural environments. We formalize expeditionary science as a sequential decision-making problem, modeled using the language of partially-observable Markov decision processes (POMDPs). Solving the expeditionary science POMDP under real-world constraints requires efficient probabilistic modeling and decision-making in problems with complex dynamics and observational models. Previous work in informative path planning, adaptive sampling, and experimental design have shown compelling results, largely in static environments, using data-driven models and information-based rewards. However, these methodologies do not trivially extend to expeditionary science in spatiotemporal environments: they generally do not make use of scientific knowledge such as equations of state dynamics, they focus on information gathering as opposed to scientific task execution, and they make use of decision-making approaches that scale poorly to large, continuous problems with long planning horizons and real-time operational constraints. In this work, we discuss these and other challenges related to probabilistic modeling and decision-making in expeditionary science, and present some of our preliminary work that addresses these gaps. We ground our results in a real expeditionary science deployment of an autonomous underwater vehicle (AUV) in the deep ocean for hydrothermal vent discovery and characterization. Our concluding thoughts highlight remaining work to be done, and the challenges that merit consideration by the reinforcement learning and decision-making community.
Technical Report: A Hierarchical Deliberative-Reactive System Architecture for Task and Motion Planning in Partially Known Environments
Feb 03, 2022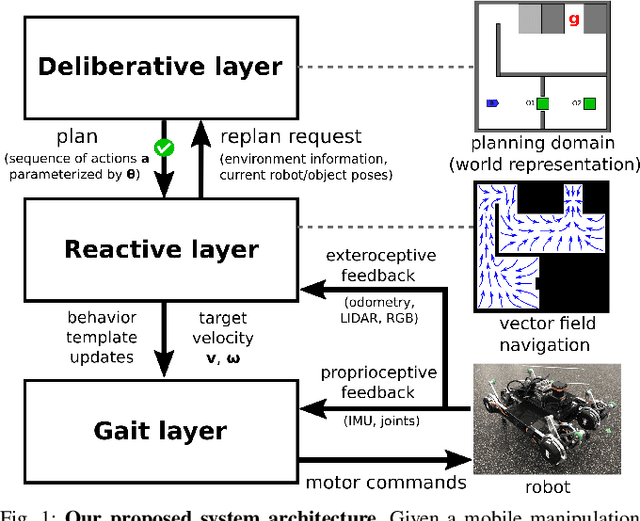
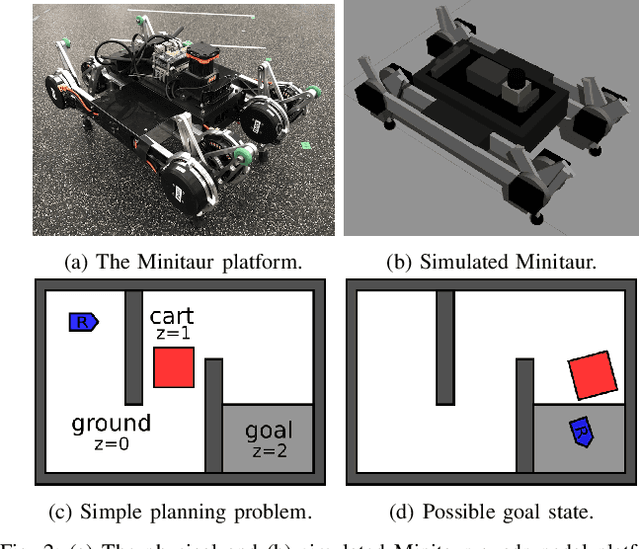
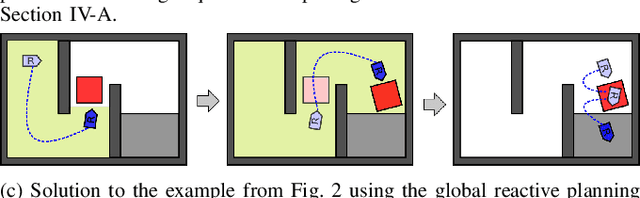
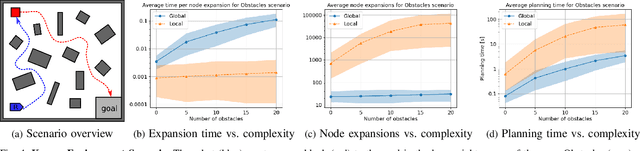
We describe a task and motion planning architecture for highly dynamic systems that combines a domain-independent sampling-based deliberative planning algorithm with a global reactive planner. We leverage the recent development of a reactive, vector field planner that provides guarantees of reachability to large regions of the environment even in the face of unknown or unforeseen obstacles. The reachability guarantees can be formalized using contracts that allow a deliberative planner to reason purely in terms of those contracts and synthesize a plan by choosing a sequence of reactive behaviors and their target configurations, without evaluating specific motion plans between targets. This reduces both the search depth at which plans will be found, and the number of samples required to ensure a plan exists, while crucially preserving correctness guarantees. The result is reduced computational cost of synthesizing plans, and increased robustness of generated plans to actuator noise, model misspecification, or unknown obstacles. Simulation studies show that our hierarchical planning and execution architecture can solve complex navigation and rearrangement tasks, even when faced with narrow passageways or incomplete world information.
From Machine Learning to Robotics: Challenges and Opportunities for Embodied Intelligence
Oct 28, 2021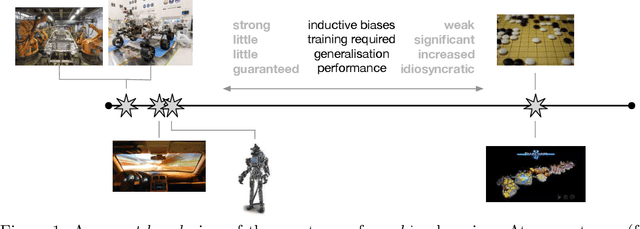
Machine learning has long since become a keystone technology, accelerating science and applications in a broad range of domains. Consequently, the notion of applying learning methods to a particular problem set has become an established and valuable modus operandi to advance a particular field. In this article we argue that such an approach does not straightforwardly extended to robotics -- or to embodied intelligence more generally: systems which engage in a purposeful exchange of energy and information with a physical environment. In particular, the purview of embodied intelligent agents extends significantly beyond the typical considerations of main-stream machine learning approaches, which typically (i) do not consider operation under conditions significantly different from those encountered during training; (ii) do not consider the often substantial, long-lasting and potentially safety-critical nature of interactions during learning and deployment; (iii) do not require ready adaptation to novel tasks while at the same time (iv) effectively and efficiently curating and extending their models of the world through targeted and deliberate actions. In reality, therefore, these limitations result in learning-based systems which suffer from many of the same operational shortcomings as more traditional, engineering-based approaches when deployed on a robot outside a well defined, and often narrow operating envelope. Contrary to viewing embodied intelligence as another application domain for machine learning, here we argue that it is in fact a key driver for the advancement of machine learning technology. In this article our goal is to highlight challenges and opportunities that are specific to embodied intelligence and to propose research directions which may significantly advance the state-of-the-art in robot learning.
Convex Iteration for Distance-Geometric Inverse Kinematics
Sep 08, 2021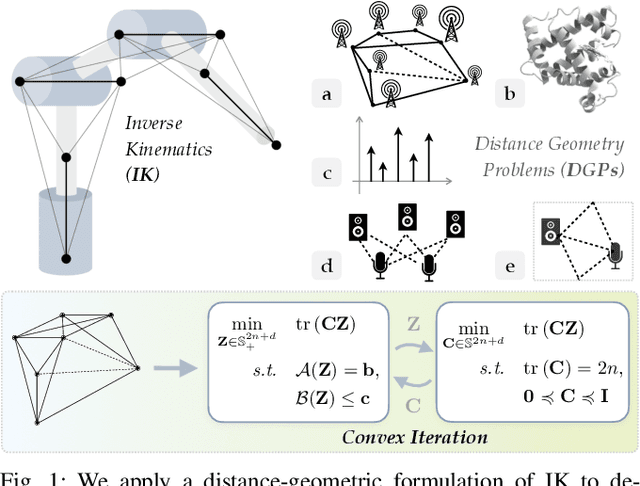
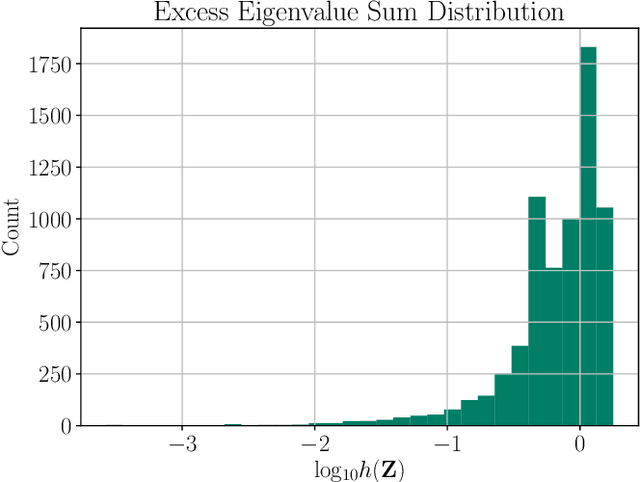
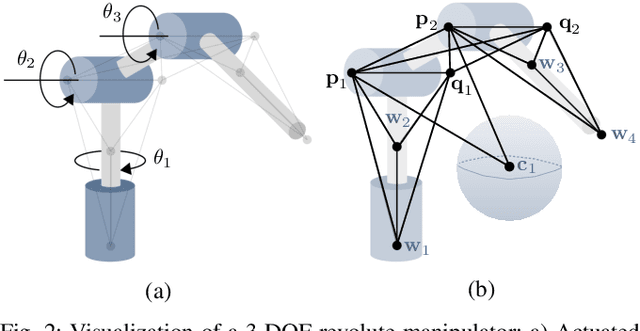
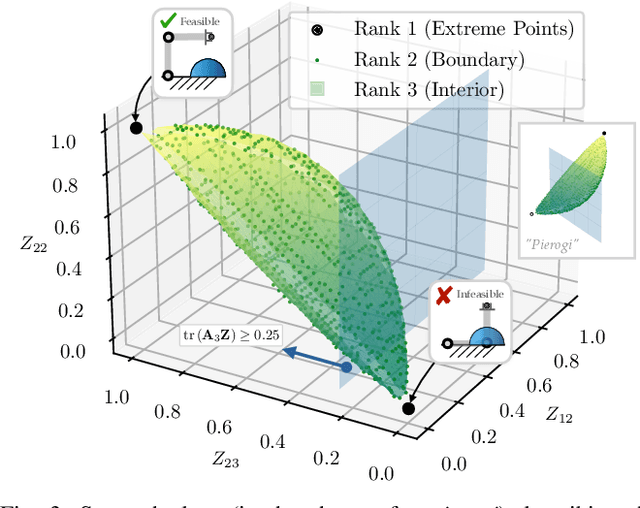
Inverse kinematics (IK) is the problem of finding robot joint configurations that satisfy constraints on the position or pose of one or more end-effectors. For robots with redundant degrees of freedom, there is often an infinite, nonconvex set of solutions. The IK problem is further complicated when collision avoidance constraints are imposed by obstacles in the workspace. In general, closed-form expressions yielding feasible configurations do not exist, motivating the use of numerical solution methods. However, these approaches rely on local optimization of nonconvex problems, often requiring an accurate initialization or numerous re-initializations to converge to a valid solution. In this work, we first formulate complicated inverse kinematics problems as convex feasibility problems whose low-rank feasible points provide exact IK solutions. We then present CIDGIK (Convex Iteration for Distance-Geometric Inverse Kinematics), an algorithm that solves these feasibility problems with a sequence of semidefinite programs whose objectives are designed to encourage low-rank minimizers. Our problem formulation elegantly unifies the configuration space and workspace constraints of a robot: intrinsic robot geometry and obstacle avoidance are both expressed as simple linear matrix equations and inequalities. Our experimental results for a variety of popular manipulator models demonstrate faster and more accurate convergence than a conventional nonlinear optimization-based approach, especially in environments with many obstacles.
Active Learning of Abstract Plan Feasibility
Jul 01, 2021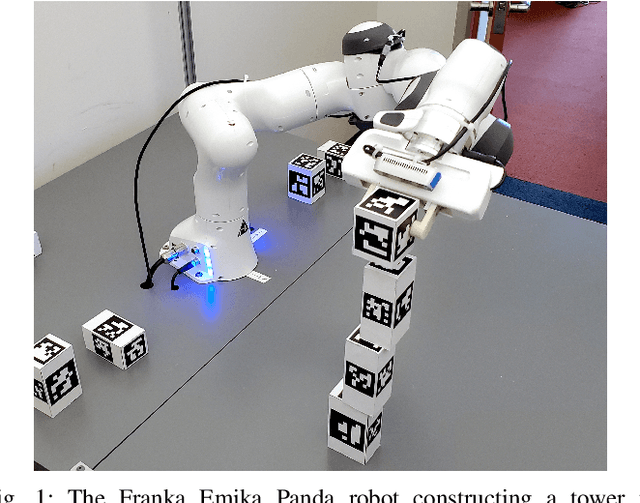
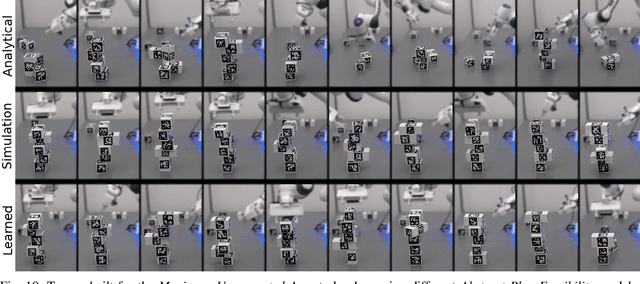
Long horizon sequential manipulation tasks are effectively addressed hierarchically: at a high level of abstraction the planner searches over abstract action sequences, and when a plan is found, lower level motion plans are generated. Such a strategy hinges on the ability to reliably predict that a feasible low level plan will be found which satisfies the abstract plan. However, computing Abstract Plan Feasibility (APF) is difficult because the outcome of a plan depends on real-world phenomena that are difficult to model, such as noise in estimation and execution. In this work, we present an active learning approach to efficiently acquire an APF predictor through task-independent, curious exploration on a robot. The robot identifies plans whose outcomes would be informative about APF, executes those plans, and learns from their successes or failures. Critically, we leverage an infeasible subsequence property to prune candidate plans in the active learning strategy, allowing our system to learn from less data. We evaluate our strategy in simulation and on a real Franka Emika Panda robot with integrated perception, experimentation, planning, and execution. In a stacking domain where objects have non-uniform mass distributions, we show that our system permits real robot learning of an APF model in four hundred self-supervised interactions, and that our learned model can be used effectively in multiple downstream tasks.
Language Understanding for Field and Service Robots in a Priori Unknown Environments
May 21, 2021
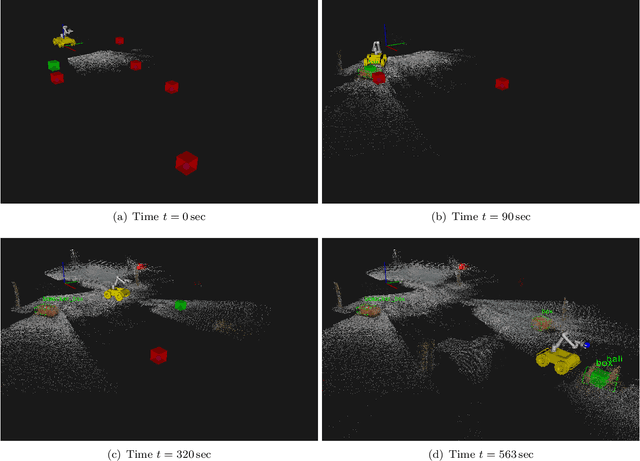
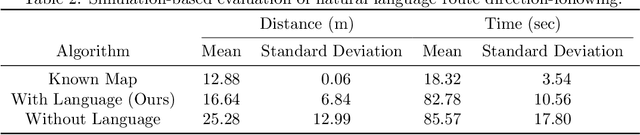
Contemporary approaches to perception, planning, estimation, and control have allowed robots to operate robustly as our remote surrogates in uncertain, unstructured environments. There is now an opportunity for robots to operate not only in isolation, but also with and alongside humans in our complex environments. Natural language provides an efficient and flexible medium through which humans can communicate with collaborative robots. Through significant progress in statistical methods for natural language understanding, robots are now able to interpret a diverse array of free-form navigation, manipulation, and mobile manipulation commands. However, most contemporary approaches require a detailed prior spatial-semantic map of the robot's environment that models the space of possible referents of the utterance. Consequently, these methods fail when robots are deployed in new, previously unknown, or partially observed environments, particularly when mental models of the environment differ between the human operator and the robot. This paper provides a comprehensive description of a novel learning framework that allows field and service robots to interpret and correctly execute natural language instructions in a priori unknown, unstructured environments. Integral to our approach is its use of language as a "sensor" -- inferring spatial, topological, and semantic information implicit in natural language utterances and then exploiting this information to learn a distribution over a latent environment model. We incorporate this distribution in a probabilistic language grounding model and infer a distribution over a symbolic representation of the robot's action space. We use imitation learning to identify a belief space policy that reasons over the environment and behavior distributions. We evaluate our framework through a variety of different navigation and mobile manipulation experiments.
Learning and Planning for Temporally Extended Tasks in Unknown Environments
Apr 28, 2021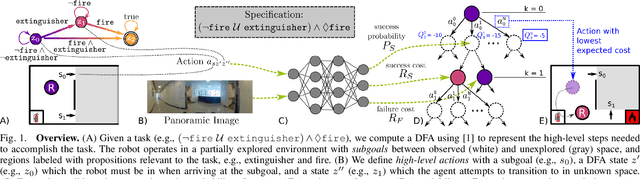
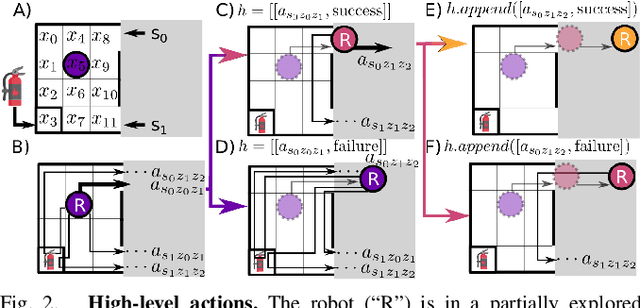
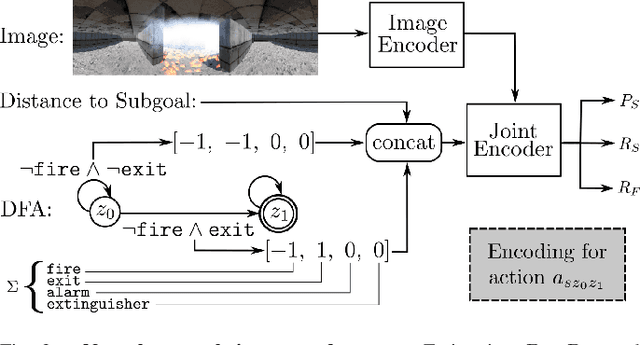

We propose a novel planning technique for satisfying tasks specified in temporal logic in partially revealed environments. We define high-level actions derived from the environment and the given task itself, and estimate how each action contributes to progress towards completing the task. As the map is revealed, we estimate the cost and probability of success of each action from images and an encoding of that action using a trained neural network. These estimates guide search for the minimum-expected-cost plan within our model. Our learned model is structured to generalize across environments and task specifications without requiring retraining. We demonstrate an improvement in total cost in both simulated and real-world experiments compared to a heuristic-driven baseline.
Reactive Task and Motion Planning under Temporal Logic Specifications
Mar 26, 2021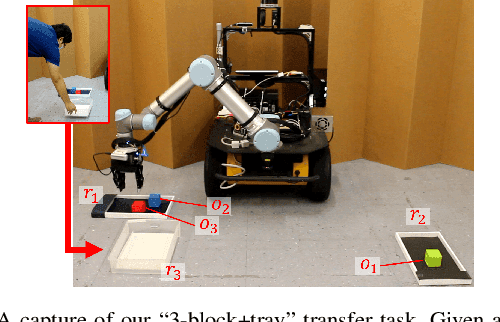
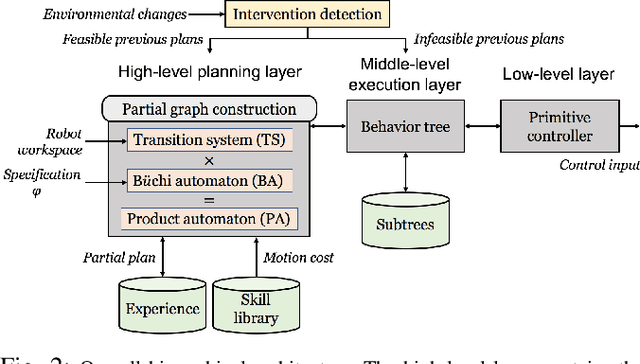
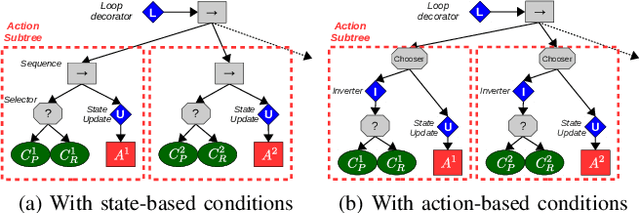
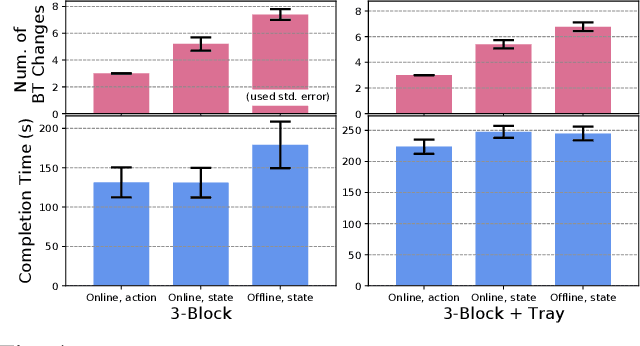
We present a task-and-motion planning (TAMP) algorithm robust against a human operator's cooperative or adversarial interventions. Interventions often invalidate the current plan and require replanning on the fly. Replanning can be computationally expensive and often interrupts seamless task execution. We introduce a dynamically reconfigurable planning methodology with behavior tree-based control strategies toward reactive TAMP, which takes the advantage of previous plans and incremental graph search during temporal logic-based reactive synthesis. Our algorithm also shows efficient recovery functionalities that minimize the number of replanning steps. Finally, our algorithm produces a robust, efficient, and complete TAMP solution. Our experimental results show the algorithm results in superior manipulation performance in both simulated and real-world tasks.
A Smooth Representation of Belief over SO for Deep Rotation Learning with Uncertainty
Jun 17, 2020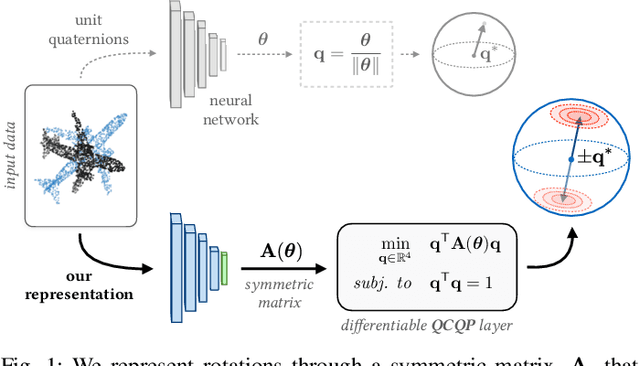
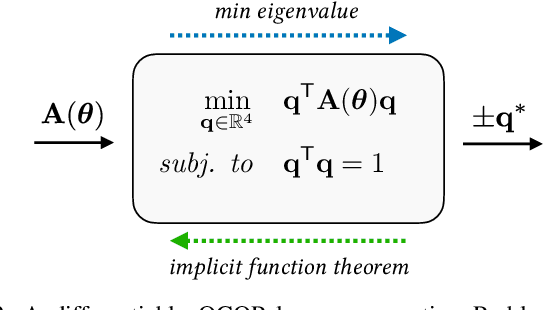
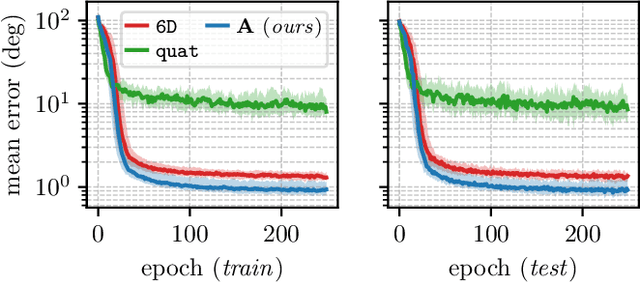
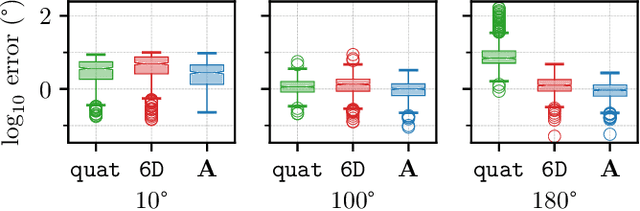
Accurate rotation estimation is at the heart of robot perception tasks such as visual odometry and object pose estimation. Deep neural networks have provided a new way to perform these tasks, and the choice of rotation representation is an important part of network design. In this work, we present a novel symmetric matrix representation of the 3D rotation group, SO(3), with two important properties that make it particularly suitable for learned models: (1) it satisfies a smoothness property that improves convergence and generalization when regressing large rotation targets, and (2) it encodes a symmetric Bingham belief over the space of unit quaternions, permitting the training of uncertainty-aware models. We empirically validate the benefits of our formulation by training deep neural rotation regressors on two data modalities. First, we use synthetic point-cloud data to show that our representation leads to superior predictive accuracy over existing representations for arbitrary rotation targets. Second, we use image data collected onboard ground and aerial vehicles to demonstrate that our representation is amenable to an effective out-of-distribution (OOD) rejection technique that significantly improves the robustness of rotation estimates to unseen environmental effects and corrupted input images, without requiring the use of an explicit likelihood loss, stochastic sampling, or an auxiliary classifier. This capability is key for safety-critical applications where detecting novel inputs can prevent catastrophic failure of learned models.