 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementing Robust M-Estimators with Certifiable Factor Graph Optimization
Mar 21, 2026Parameter estimation in robotics and computer vision faces formidable challenges from both outlier contamination and nonconvex optimization landscapes. While M-estimation addresses the problem of outliers through robust loss functions, it creates severely nonconvex problems that are difficult to solve globally. Adaptive reweighting schemes provide one particularly appealing strategy for implementing M-estimation in practice: these methods solve a sequence of simpler weighted least squares (WLS) subproblems, enabling both the use of standard least squares solvers and the recovery of higher-quality estimates than simple local search. However, adaptive reweighting still crucially relies upon solving the inner WLS problems effectively, a task that remains challenging in many robotics applications due to the intrinsic nonconvexity of many common parameter spaces (e.g. rotations and poses). In this paper, we show how one can easily implement adaptively reweighted M-estimators with certifiably correct solvers for the inner WLS subproblems using only fast local optimization over smooth manifolds. Our approach exploits recent work on certifiable factor graph optimization to provide global optimality certificates for the inner WLS subproblems while seamlessly integrating into existing factor graph-based software libraries and workflows. Experimental evaluation on pose-graph optimization and landmark SLAM tasks demonstrates that our adaptively reweighted certifiable estimation approach provides higher-quality estimates than alternative local search-based methods, while scaling tractably to realistic problem sizes.
Certifiable Estimation with Factor Graphs
Mar 01, 2026Factor graphs provide a convenient modular modeling language that enables practitioners to design and deploy high-performance robotic state estimation systems by composing simple, reusable building blocks. However, inference in these models is typically performed using local optimization methods that can converge to suboptimal solutions, a serious reliability concern in safety-critical applications. Conversely, certifiable estimators based on convex relaxation can recover verifiably globally optimal solutions in many practical settings, but the computational cost of solving their large-scale relaxations necessitates specialized, structure-exploiting solvers that require substantial expertise to implement, significantly hampering practical deployment. In this paper, we show that these two paradigms, which have thus far been treated as independent in the literature, can be naturally synthesized into a unified framework for certifiable factor graph optimization. The key insight is that factor graph structure is preserved under Shor's relaxation and Burer-Monteiro factorization: applying these transformations to a QCQP with an associated factor graph representation yields a lifted problem admitting a factor graph model with identical connectivity, in which variables and factors are simple one-to-one algebraic transformations of those in the original QCQP. This structural preservation enables the Riemannian Staircase methodology for certifiable estimation to be implemented using the same mature, highly-performant factor graph libraries and workflows already ubiquitously employed throughout robotics and computer vision, making certifiable estimation as straightforward to design and deploy as conventional factor graph inference.
Distributed Certifiably Correct Range-Aided SLAM
Mar 05, 2025



Reliable simultaneous localization and mapping (SLAM) algorithms are necessary for safety-critical autonomous navigation. In the communication-constrained multi-agent setting, navigation systems increasingly use point-to-point range sensors as they afford measurements with low bandwidth requirements and known data association. The state estimation problem for these systems takes the form of range-aided (RA) SLAM. However, distributed algorithms for solving the RA-SLAM problem lack formal guarantees on the quality of the returned estimate. To this end, we present the first distributed algorithm for RA-SLAM that can efficiently recover certifiably globally optimal solutions. Our algorithm, distributed certifiably correct RA-SLAM (DCORA), achieves this via the Riemannian Staircase method, where computational procedures developed for distributed certifiably correct pose graph optimization are generalized to the RA-SLAM problem. We demonstrate DCORA's efficacy on real-world multi-agent datasets by achieving absolute trajectory errors comparable to those of a state-of-the-art centralized certifiably correct RA-SLAM algorithm. Additionally, we perform a parametric study on the structure of the RA-SLAM problem using synthetic data, revealing how common parameters affect DCORA's performance.
A Trust-Region Method for Graphical Stein Variational Inference
Oct 21, 2024Stein variational inference (SVI) is a sample-based approximate Bayesian inference technique that generates a sample set by jointly optimizing the samples' locations to minimize an information-theoretic measure of discrepancy with the target probability distribution. SVI thus provides a fast and significantly more sample-efficient approach to Bayesian inference than traditional (random-sampling-based) alternatives. However, the optimization techniques employed in existing SVI methods struggle to address problems in which the target distribution is high-dimensional, poorly-conditioned, or non-convex, which severely limits the range of their practical applicability. In this paper, we propose a novel trust-region optimization approach for SVI that successfully addresses each of these challenges. Our method builds upon prior work in SVI by leveraging conditional independences in the target distribution (to achieve high-dimensional scaling) and second-order information (to address poor conditioning), while additionally providing an effective adaptive step control procedure, which is essential for ensuring convergence on challenging non-convex optimization problems. Experimental results show our method achieves superior numerical performance, both in convergence rate and sample accuracy, and scales better in high-dimensional distributions, than previous SVI techniques.
OASIS: Optimal Arrangements for Sensing in SLAM
Sep 19, 2023



The number and arrangement of sensors on an autonomous mobile robot dramatically influence its perception capabilities. Ensuring that sensors are mounted in a manner that enables accurate detection, localization, and mapping is essential for the success of downstream control tasks. However, when designing a new robotic platform, researchers and practitioners alike usually mimic standard configurations or maximize simple heuristics like field-of-view (FOV) coverage to decide where to place exteroceptive sensors. In this work, we conduct an information-theoretic investigation of this overlooked element of mobile robotic perception in the context of simultaneous localization and mapping (SLAM). We show how to formalize the sensor arrangement problem as a form of subset selection under the E-optimality performance criterion. While this formulation is NP-hard in general, we further show that a combination of greedy sensor selection and fast convex relaxation-based post-hoc verification enables the efficient recovery of certifiably optimal sensor designs in practice. Results from synthetic experiments reveal that sensors placed with OASIS outperform benchmarks in terms of mean squared error of visual SLAM estimates.
Certifiably Correct Range-Aided SLAM
Feb 22, 2023We present the first algorithm capable of efficiently computing certifiably optimal solutions to range-aided simultaneous localization and mapping (RA-SLAM) problems. Robotic navigation systems are increasingly incorporating point-to-point ranging sensors, leading state estimation which takes the form of RA-SLAM. However, the RA-SLAM problem is more difficult to solve than traditional pose-graph SLAM; ranging sensor models introduce additional non-convexity, unlike pose-pose or pose-landmark measurements, a single range measurement does not uniquely determine the relative transform between the involved sensors, and RA-SLAM inference is highly sensitive to initial estimates. Our approach relaxes the RA-SLAM problem to a semidefinite program (SDP), which we show how to solve efficiently using the Riemannian staircase methodology. The solution of this SDP provides a high-quality initialization for our original RA-SLAM problem, which is subsequently refined via local optimization, as well as a lower-bound on the RA-SLAM problem's optimal value. Our algorithm, named certifiably correct RA-SLAM (CORA), applies to problems comprised of arbitrary pose-pose, pose-landmark, and ranging measurements. Evaluation on simulated and real-world marine examples shows that our algorithm frequently produces certifiably optimal RA-SLAM solutions; moreover, even suboptimal estimates are typically within 1-2\% of the optimal value.
SCORE: A Second-Order Conic Initialization for Range-Aided SLAM
Oct 06, 2022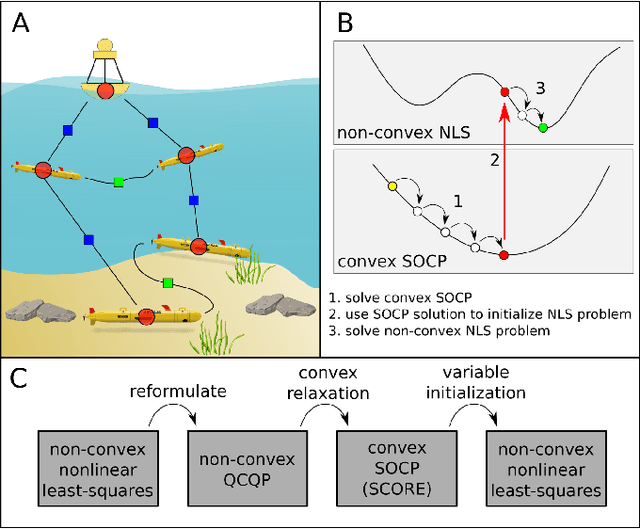
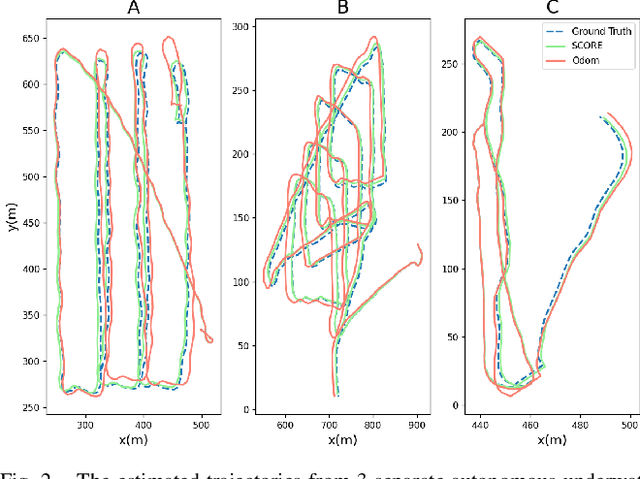
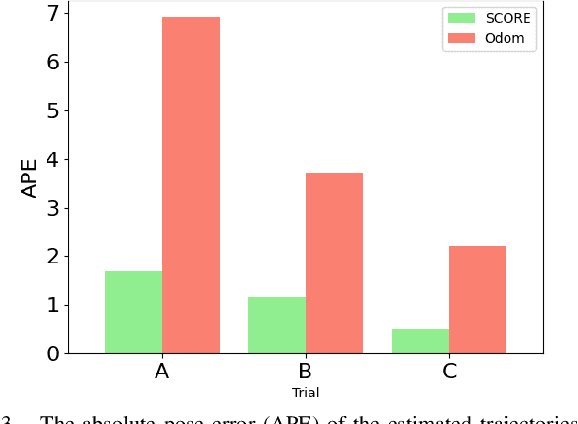
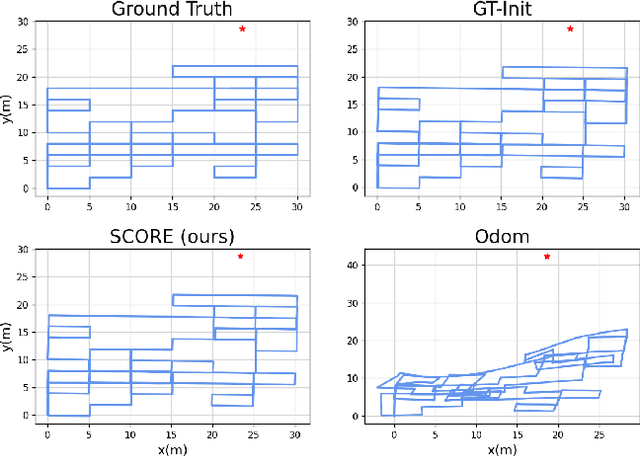
We present a novel initialization technique for the range-aided simultaneous localization and mapping (RA-SLAM) problem. In RA-SLAM we consider measurements of point-to-point distances in addition to measurements of rigid transformations to landmark or pose variables. Standard formulations of RA-SLAM approach the problem as non-convex optimization, which requires a good initialization to obtain quality results. The initialization technique proposed here relaxes the RA-SLAM problem to a convex problem which is then solved to determine an initialization for the original, non-convex problem. The relaxation is a second-order cone program (SOCP), which is derived from a quadratically constrained quadratic program (QCQP) formulation of the RA-SLAM problem. As a SOCP, the method is highly scalable. We name this relaxation Second-order COnic RElaxation for RA-SLAM (SCORE). To our knowledge, this work represents the first convex relaxation for RA-SLAM. We present real-world and simulated experiments which show SCORE initialization permits the efficient recovery of quality solutions for a variety of challenging single- and multi-robot RA-SLAM problems with thousands of poses and range measurements.
Accelerating Certifiable Estimation with Preconditioned Eigensolvers
Jul 12, 2022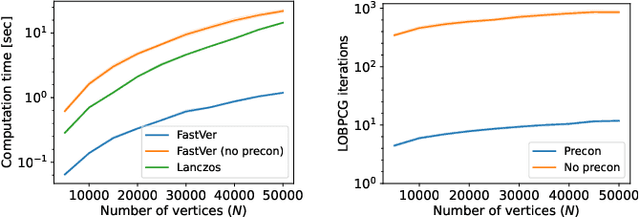
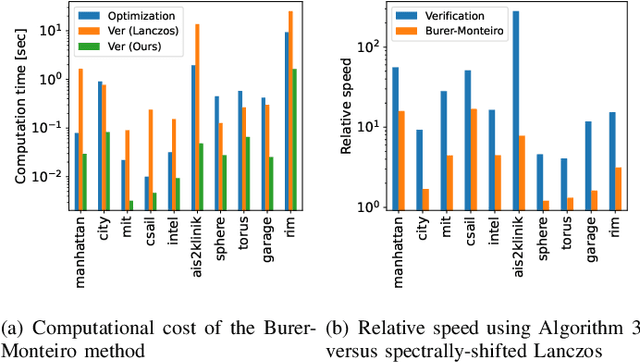
Convex (specifically semidefinite) relaxation provides a powerful approach to constructing robust machine perception systems, enabling the recovery of certifiably globally optimal solutions of challenging estimation problems in many practical settings. However, solving the large-scale semidefinite relaxations underpinning this approach remains a formidable computational challenge. A dominant cost in many state-of-the-art (Burer-Monteiro factorization-based) certifiable estimation methods is solution verification (testing the global optimality of a given candidate solution), which entails computing a minimum eigenpair of a certain symmetric certificate matrix. In this paper, we show how to significantly accelerate this verification step, and thereby the overall speed of certifiable estimation methods. First, we show that the certificate matrices arising in the Burer-Monteiro approach generically possess spectra that make the verification problem expensive to solve using standard iterative eigenvalue methods. We then show how to address this challenge using preconditioned eigensolvers; specifically, we design a specialized solution verification algorithm based upon the locally optimal block preconditioned conjugate gradient (LOBPCG) method together with a simple yet highly effective algebraic preconditioner. Experimental evaluation on a variety of simulated and real-world examples shows that our proposed verification scheme is very effective in practice, accelerating solution verification by up to 280x, and the overall Burer-Monteiro method by up to 16x, versus the standard Lanczos method when applied to relaxations derived from large-scale SLAM benchmarks.
Spectral Measurement Sparsification for Pose-Graph SLAM
Mar 25, 2022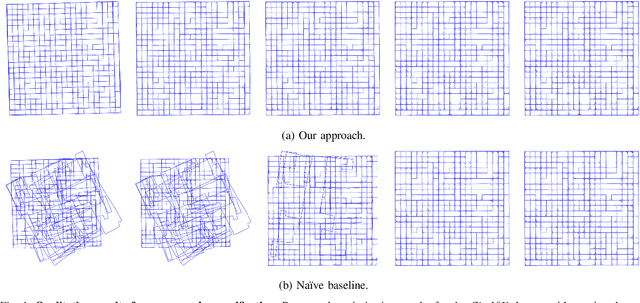
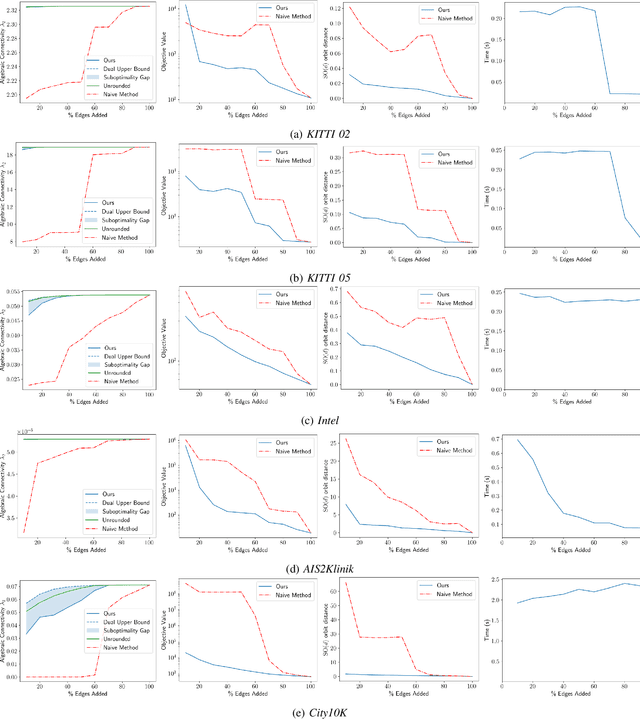
Simultaneous localization and mapping (SLAM) is a critical capability in autonomous navigation, but in order to scale SLAM to the setting of "lifelong" SLAM, particularly under memory or computation constraints, a robot must be able to determine what information should be retained and what can safely be forgotten. In graph-based SLAM, the number of edges (measurements) in a pose graph determines both the memory requirements of storing a robot's observations and the computational expense of algorithms deployed for performing state estimation using those observations; both of which can grow unbounded during long-term navigation. To address this, we propose a spectral approach for pose graph sparsification which maximizes the algebraic connectivity of the sparsified measurement graphs, a key quantity which has been shown to control the estimation error of pose graph SLAM solutions. Our algorithm, MAC (for "maximizing algebraic connectivity"), which is based on convex relaxation, is simple and computationally inexpensive, and admits formal post hoc performance guarantees on the quality of the solutions it provides. In experiments on benchmark pose-graph SLAM datasets, we show that our approach quickly produces high-quality sparsification results which retain the connectivity of the graph and, in turn, the quality of corresponding SLAM solutions, as compared to a baseline approach which does not consider graph connectivity.
Distributed Riemannian Optimization with Lazy Communication for Collaborative Geometric Estimation
Mar 02, 2022

We present the first distributed optimization algorithm with lazy communication for collaborative geometric estimation, the backbone of modern collaborative simultaneous localization and mapping (SLAM) and structure-from-motion (SfM) applications. Our method allows agents to cooperatively reconstruct a shared geometric model on a central server by fusing individual observations, but without the need to transmit potentially sensitive information about the agents themselves (such as their locations). Furthermore, to alleviate the burden of communication during iterative optimization, we design a set of communication triggering conditions that enable agents to selectively upload local information that are useful to global optimization. Our approach thus achieves significant communication reduction with minimal impact on optimization performance. As our main theoretical contribution, we prove that our method converges to first-order critical points with a sublinear convergence rate. Numerical evaluations on bundle adjustment problems from collaborative SLAM and SfM datasets show that our method performs competitively against existing distributed techniques, while achieving up to 78% total communication reduction.