 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOSCAR: Obstacle Survival Curves for Adaptive Robot Navigation
May 31, 2026A mobile robot following a graph of known routes can make costly navigation errors when a temporary obstacle blocks a critical edge: waiting too long behind a parked cart wastes time, but immediately rerouting around a person who would move in a few seconds is also inefficient. Standard reactive obstacle avoidance addresses local motion around obstacles, while fixed wait-or-reroute rules ignore how long different obstacle types tend to persist. We propose OSCAR: an adaptive survival-modeling framework for graph-based navigation with temporary blockages. Assuming obstacle class labels are available at encounter time, the robot learns class-conditioned residual clearance-time distributions from online experience, including right-censored observations when it reroutes before observing clearance. These survival models are integrated into a time-dependent graph planner that maintains obstacle memory and computes a patience threshold at each blocked edge: how long to wait before taking an alternate route. The method continuously updates its clearance estimates across episodes and uses them to balance waiting against rerouting. We evaluate the approach in simulation and on a real mobile robot in a university atrium with obstacles including people, chairs, bins, and tubes. In simulation, the learned policy's time-to-goal converges to within 1% of an oracle with access to ground-truth clearance distributions after fewer than 20 observations per obstacle class, outperforming all heuristic baselines. Real-world deployment confirms that the policy improves online, adapting its patience thresholds from experience across 50 navigation episodes.
From Machine Learning to Robotics: Challenges and Opportunities for Embodied Intelligence
Oct 28, 2021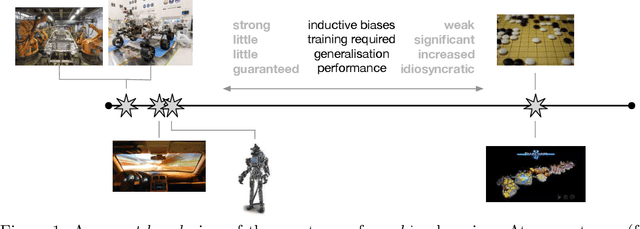
Machine learning has long since become a keystone technology, accelerating science and applications in a broad range of domains. Consequently, the notion of applying learning methods to a particular problem set has become an established and valuable modus operandi to advance a particular field. In this article we argue that such an approach does not straightforwardly extended to robotics -- or to embodied intelligence more generally: systems which engage in a purposeful exchange of energy and information with a physical environment. In particular, the purview of embodied intelligent agents extends significantly beyond the typical considerations of main-stream machine learning approaches, which typically (i) do not consider operation under conditions significantly different from those encountered during training; (ii) do not consider the often substantial, long-lasting and potentially safety-critical nature of interactions during learning and deployment; (iii) do not require ready adaptation to novel tasks while at the same time (iv) effectively and efficiently curating and extending their models of the world through targeted and deliberate actions. In reality, therefore, these limitations result in learning-based systems which suffer from many of the same operational shortcomings as more traditional, engineering-based approaches when deployed on a robot outside a well defined, and often narrow operating envelope. Contrary to viewing embodied intelligence as another application domain for machine learning, here we argue that it is in fact a key driver for the advancement of machine learning technology. In this article our goal is to highlight challenges and opportunities that are specific to embodied intelligence and to propose research directions which may significantly advance the state-of-the-art in robot learning.