 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnyTeleop: A General Vision-Based Dexterous Robot Arm-Hand Teleoperation System
Aug 02, 2023



Vision-based teleoperation offers the possibility to endow robots with human-level intelligence to physically interact with the environment, while only requiring low-cost camera sensors. However, current vision-based teleoperation systems are designed and engineered towards a particular robot model and deploy environment, which scales poorly as the pool of the robot models expands and the variety of the operating environment increases. In this paper, we propose AnyTeleop, a unified and general teleoperation system to support multiple different arms, hands, realities, and camera configurations within a single system. Although being designed to provide great flexibility to the choice of simulators and real hardware, our system can still achieve great performance. For real-world experiments, AnyTeleop can outperform a previous system that was designed for a specific robot hardware with a higher success rate, using the same robot. For teleoperation in simulation, AnyTeleop leads to better imitation learning performance, compared with a previous system that is particularly designed for that simulator. Project page: http://anyteleop.com/.
DeXtreme: Transfer of Agile In-hand Manipulation from Simulation to Reality
Oct 25, 2022Recent work has demonstrated the ability of deep reinforcement learning (RL) algorithms to learn complex robotic behaviours in simulation, including in the domain of multi-fingered manipulation. However, such models can be challenging to transfer to the real world due to the gap between simulation and reality. In this paper, we present our techniques to train a) a policy that can perform robust dexterous manipulation on an anthropomorphic robot hand and b) a robust pose estimator suitable for providing reliable real-time information on the state of the object being manipulated. Our policies are trained to adapt to a wide range of conditions in simulation. Consequently, our vision-based policies significantly outperform the best vision policies in the literature on the same reorientation task and are competitive with policies that are given privileged state information via motion capture systems. Our work reaffirms the possibilities of sim-to-real transfer for dexterous manipulation in diverse kinds of hardware and simulator setups, and in our case, with the Allegro Hand and Isaac Gym GPU-based simulation. Furthermore, it opens up possibilities for researchers to achieve such results with commonly-available, affordable robot hands and cameras. Videos of the resulting policy and supplementary information, including experiments and demos, can be found at \url{https://dextreme.org/}
Learning Robust Real-World Dexterous Grasping Policies via Implicit Shape Augmentation
Oct 24, 2022



Dexterous robotic hands have the capability to interact with a wide variety of household objects to perform tasks like grasping. However, learning robust real world grasping policies for arbitrary objects has proven challenging due to the difficulty of generating high quality training data. In this work, we propose a learning system (ISAGrasp) for leveraging a small number of human demonstrations to bootstrap the generation of a much larger dataset containing successful grasps on a variety of novel objects. Our key insight is to use a correspondence-aware implicit generative model to deform object meshes and demonstrated human grasps in order to generate a diverse dataset of novel objects and successful grasps for supervised learning, while maintaining semantic realism. We use this dataset to train a robust grasping policy in simulation which can be deployed in the real world. We demonstrate grasping performance with a four-fingered Allegro hand in both simulation and the real world, and show this method can handle entirely new semantic classes and achieve a 79% success rate on grasping unseen objects in the real world.
DexTransfer: Real World Multi-fingered Dexterous Grasping with Minimal Human Demonstrations
Sep 28, 2022
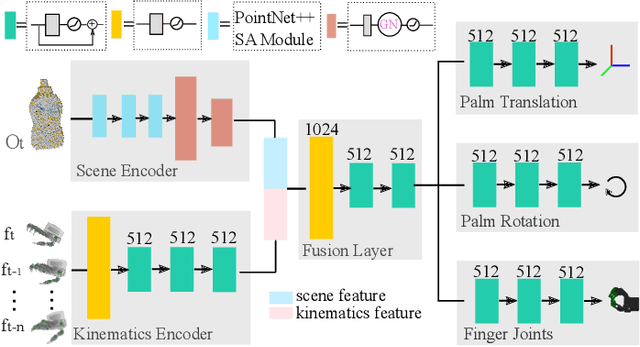
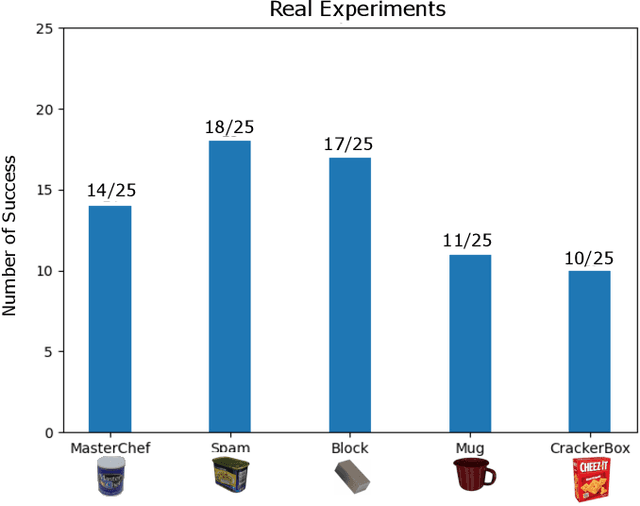
Teaching a multi-fingered dexterous robot to grasp objects in the real world has been a challenging problem due to its high dimensional state and action space. We propose a robot-learning system that can take a small number of human demonstrations and learn to grasp unseen object poses given partially occluded observations. Our system leverages a small motion capture dataset and generates a large dataset with diverse and successful trajectories for a multi-fingered robot gripper. By adding domain randomization, we show that our dataset provides robust grasping trajectories that can be transferred to a policy learner. We train a dexterous grasping policy that takes the point clouds of the object as input and predicts continuous actions to grasp objects from different initial robot states. We evaluate the effectiveness of our system on a 22-DoF floating Allegro Hand in simulation and a 23-DoF Allegro robot hand with a KUKA arm in real world. The policy learned from our dataset can generalize well on unseen object poses in both simulation and the real world
Geometric Fabrics: Generalizing Classical Mechanics to Capture the Physics of Behavior
Sep 21, 2021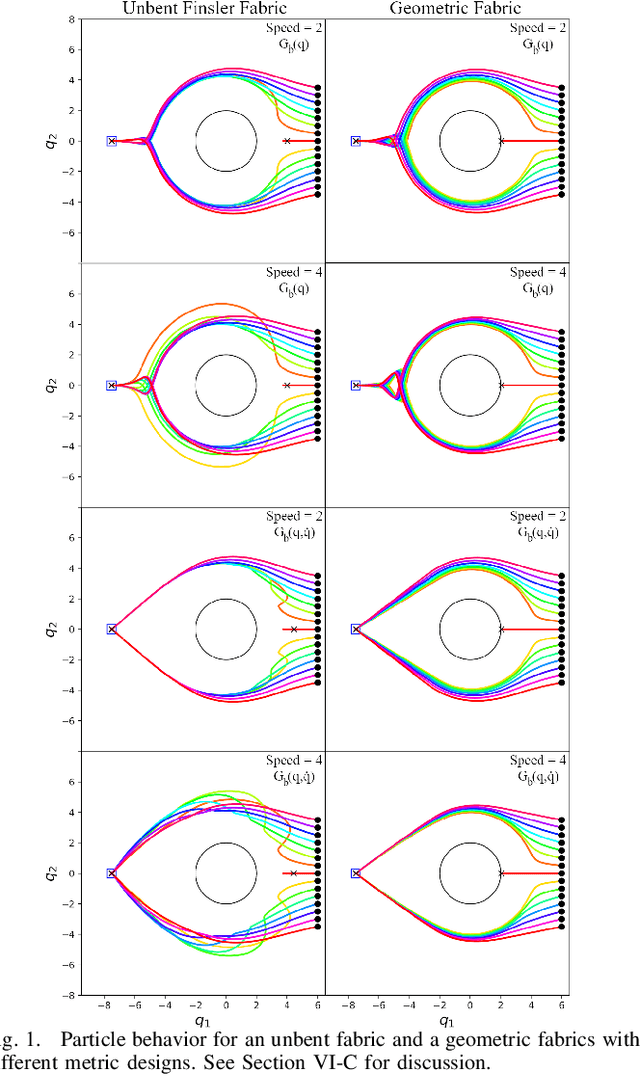
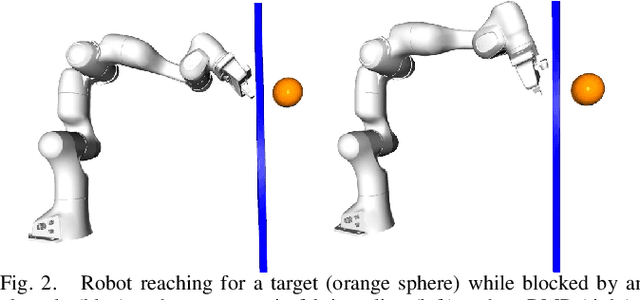
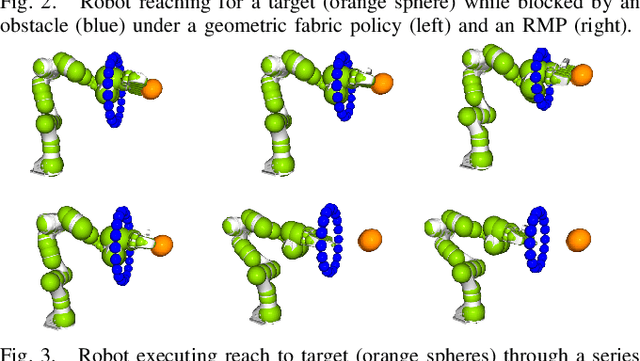
Classical mechanical systems are central to controller design in energy shaping methods of geometric control. However, their expressivity is limited by position-only metrics and the intimate link between metric and geometry. Recent work on Riemannian Motion Policies (RMPs) has shown that shedding these restrictions results in powerful design tools, but at the expense of theoretical guarantees. In this work, we generalize classical mechanics to what we call geometric fabrics, whose expressivity and theory enable the design of systems that outperform RMPs in practice. Geometric fabrics strictly generalize classical mechanics forming a new physics of behavior by first generalizing them to Finsler geometries and then explicitly bending them to shape their behavior. We develop the theory of fabrics and present both a collection of controlled experiments examining their theoretical properties and a set of robot system experiments showing improved performance over a well-engineered and hardened implementation of RMPs, our current state-of-the-art in controller design.
CoDE: Collocation for Demonstration Encoding
May 07, 2021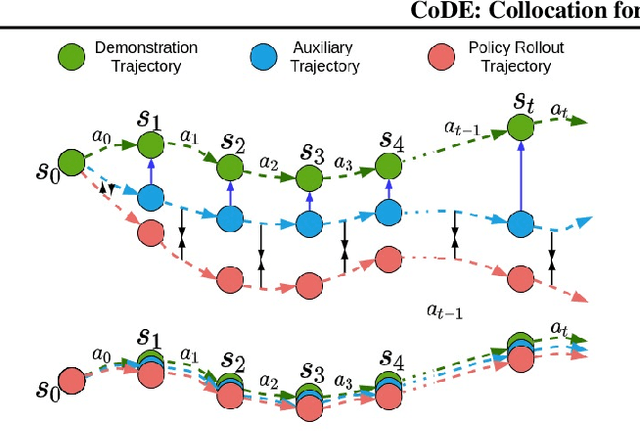
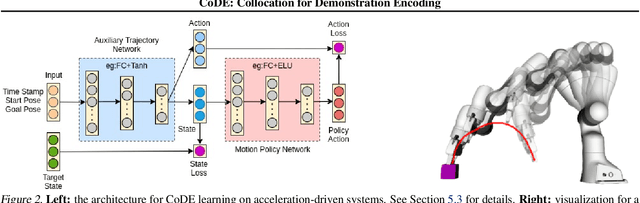
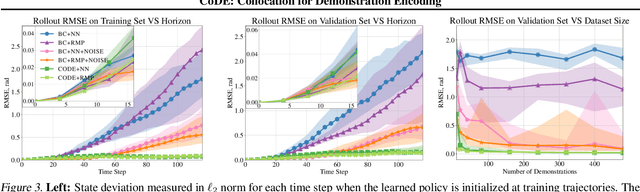
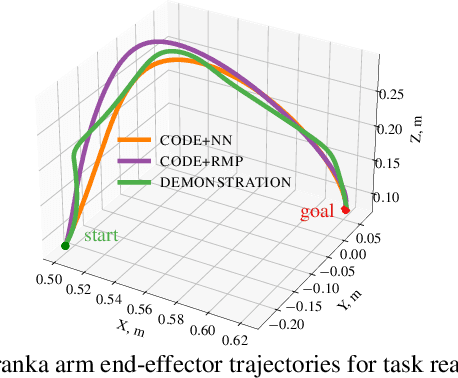
Roboticists frequently turn to Imitation learning (IL) for data efficient policy learning. Many IL methods, canonicalized by the seminal work on Dataset Aggregation (DAgger), combat distributional shift issues with older Behavior Cloning (BC) methods by introducing oracle experts. Unfortunately, access to oracle experts is often unrealistic in practice; data frequently comes from manual offline methods such as lead-through or teleoperation. We present a data-efficient imitation learning technique called Collocation for Demonstration Encoding (CoDE) that operates on only a fixed set of trajectory demonstrations by modeling learning as empirical risk minimization. We circumvent problematic back-propagation through time problems by introducing an auxiliary trajectory network taking inspiration from collocation techniques in optimal control. Our method generalizes well and is much more data efficient than standard BC methods. We present experiments on a 7-degree-of-freedom (DoF) robotic manipulator learning behavior shaping policies for efficient tabletop operation.
DexYCB: A Benchmark for Capturing Hand Grasping of Objects
Apr 09, 2021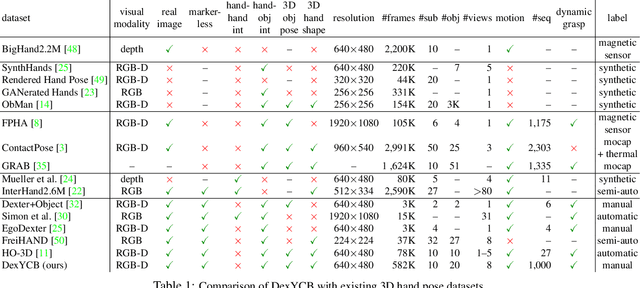
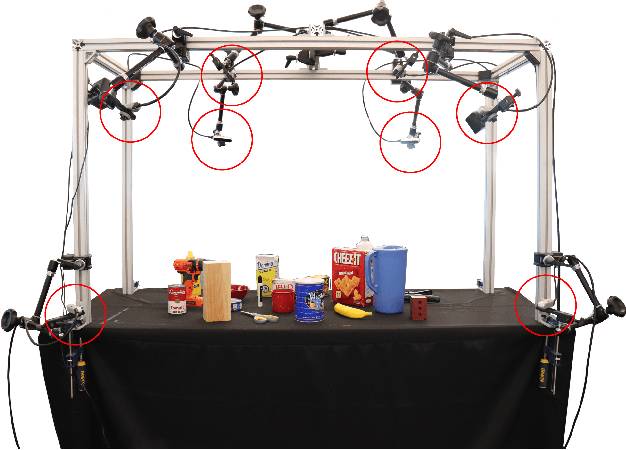
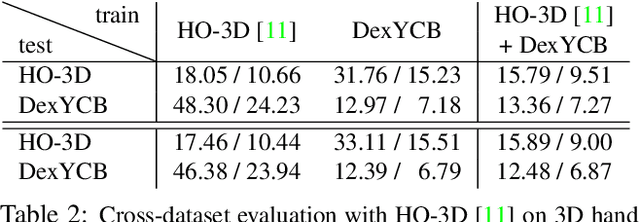

We introduce DexYCB, a new dataset for capturing hand grasping of objects. We first compare DexYCB with a related one through cross-dataset evaluation. We then present a thorough benchmark of state-of-the-art approaches on three relevant tasks: 2D object and keypoint detection, 6D object pose estimation, and 3D hand pose estimation. Finally, we evaluate a new robotics-relevant task: generating safe robot grasps in human-to-robot object handover. Dataset and code are available at https://dex-ycb.github.io.
RMP2: A Structured Composable Policy Class for Robot Learning
Mar 10, 2021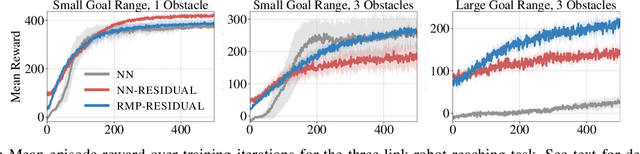
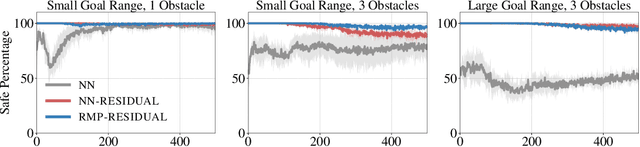
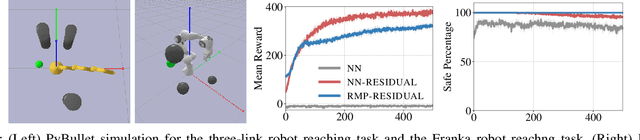
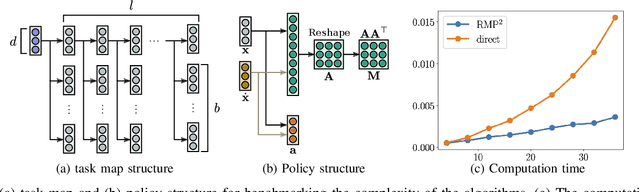
We consider the problem of learning motion policies for acceleration-based robotics systems with a structured policy class specified by RMPflow. RMPflow is a multi-task control framework that has been successfully applied in many robotics problems. Using RMPflow as a structured policy class in learning has several benefits, such as sufficient expressiveness, the flexibility to inject different levels of prior knowledge as well as the ability to transfer policies between robots. However, implementing a system for end-to-end learning RMPflow policies faces several computational challenges. In this work, we re-examine the message passing algorithm of RMPflow and propose a more efficient alternate algorithm, called RMP2, that uses modern automatic differentiation tools (such as TensorFlow and PyTorch) to compute RMPflow policies. Our new design retains the strengths of RMPflow while bringing in advantages from automatic differentiation, including 1) easy programming interfaces to designing complex transformations; 2) support of general directed acyclic graph (DAG) transformation structures; 3) end-to-end differentiability for policy learning; 4) improved computational efficiency. Because of these features, RMP2 can be treated as a structured policy class for efficient robot learning which is suitable encoding domain knowledge. Our experiments show that using structured policy class given by RMP2 can improve policy performance and safety in reinforcement learning tasks for goal reaching in cluttered space.
Interpreting and Predicting Tactile Signals for the SynTouch BioTac
Jan 14, 2021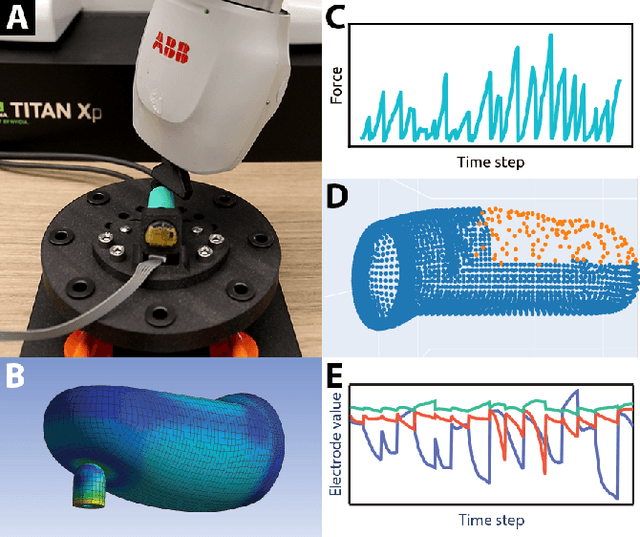
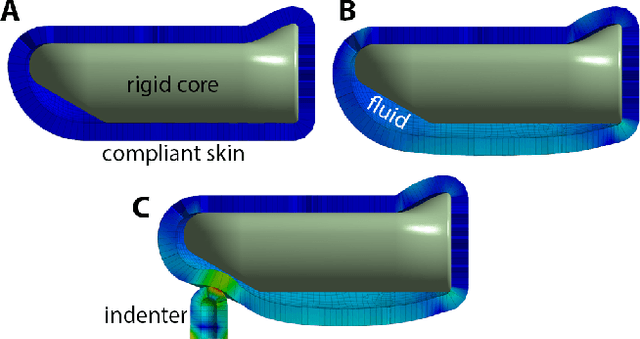
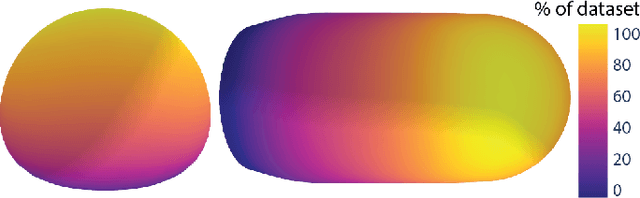
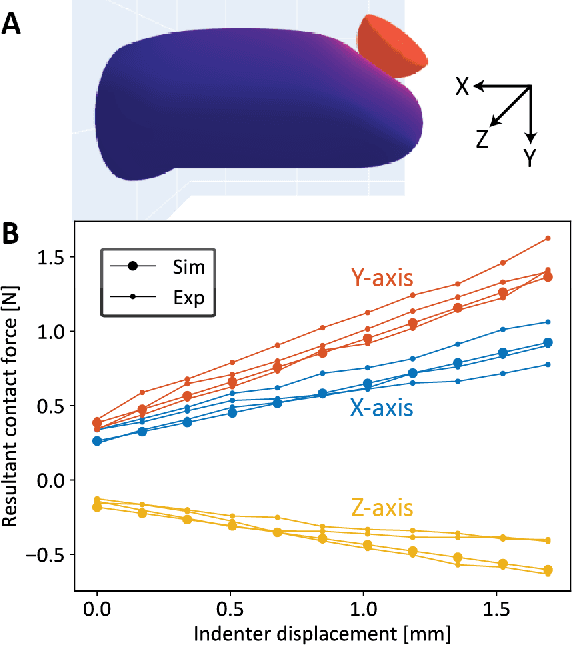
In the human hand, high-density contact information provided by afferent neurons is essential for many human grasping and manipulation capabilities. In contrast, robotic tactile sensors, including the state-of-the-art SynTouch BioTac, are typically used to provide low-density contact information, such as contact location, center of pressure, and net force. Although useful, these data do not convey or leverage the rich information content that some tactile sensors naturally measure. This research extends robotic tactile sensing beyond reduced-order models through 1) the automated creation of a precise experimental tactile dataset for the BioTac over a diverse range of physical interactions, 2) a 3D finite element (FE) model of the BioTac, which complements the experimental dataset with high-density, distributed contact data, 3) neural-network-based mappings from raw BioTac signals to not only low-dimensional experimental data, but also high-density FE deformation fields, and 4) mappings from the FE deformation fields to the raw signals themselves. The high-density data streams can provide a far greater quantity of interpretable information for grasping and manipulation algorithms than previously accessible.
Geometric Fabrics for the Acceleration-based Design of Robotic Motion
Nov 11, 2020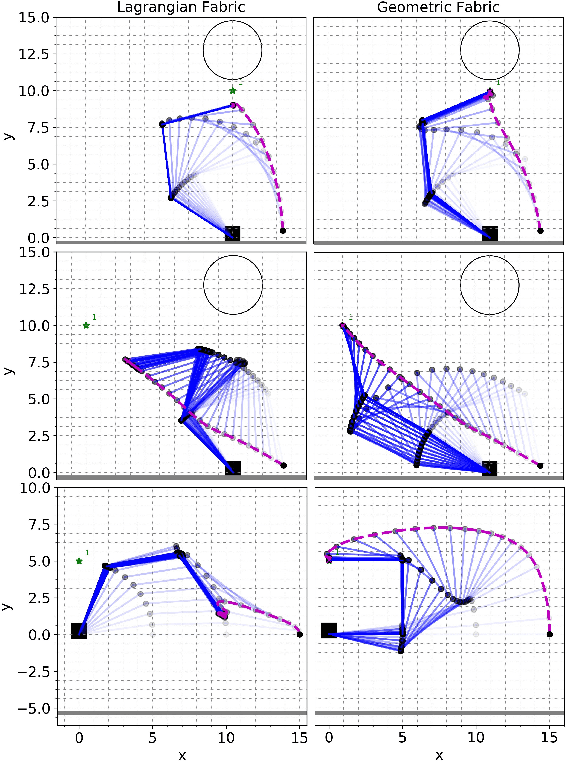
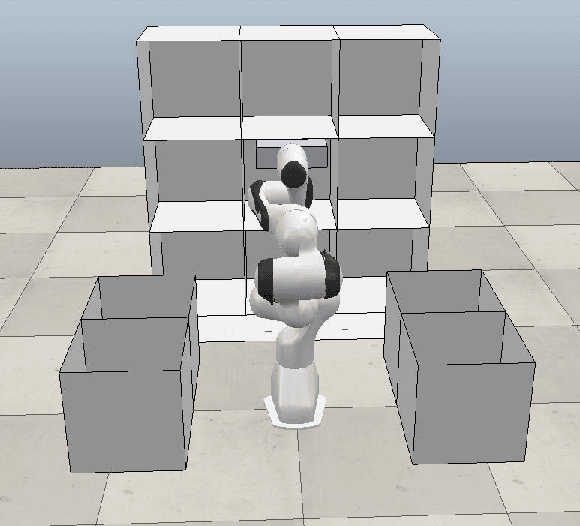
This paper describes the pragmatic design and construction of geometric fabrics for shaping a robot's task-independent nominal behavior, capturing behavioral components such as obstacle avoidance, joint limit avoidance, redundancy resolution, global navigation heuristics, etc. Geometric fabrics constitute the most concrete incarnation of a new mathematical formulation for reactive behavior called optimization fabrics. Fabrics generalize recent work on Riemannian Motion Policies (RMPs); they add provable stability guarantees and improve design consistency while promoting the intuitive acceleration-based principles of modular design that make RMPs successful. We describe a suite of mathematical modeling tools that practitioners can employ in practice and demonstrate both how to mitigate system complexity by constructing behaviors layer-wise and how to employ these tools to design robust, strongly-generalizing, policies that solve practical problems one would expect to find in industry applications. Our system exhibits intelligent global navigation behaviors expressed entirely as fabrics with zero planning or state machine governance.