 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrivacy-Preserving Credit Risk Prediction with Alternative Data
Jun 09, 2026Credit risk prediction is a critical problem in the consumer credit industry. Traditionally, financial institutions construct credit risk prediction models using borrowers' demographic, financial, and credit history data, collectively referred to as traditional data. Recent studies have demonstrated that alternative data, such as borrowers' mobile phone communication data, enable lenders to acquire fuller and more accurate profiles of borrowers' creditworthiness, thereby improving credit risk prediction performance. Nevertheless, alternative data are held by external entities independent of financial institutions. Directly sharing alternative data with financial institutions infringe on consumer privacy, yet existing credit risk prediction studies largely overlook this issue. To address this gap, we define a new problem, namely privacy-preserving credit risk prediction with alternative data, which simultaneously considers three practical constraints: the privacy-preserving constraint that protects consumer privacy, the model-confidentiality constraint that learns and stores the model centrally at the financial institution, and the lossless constraint that maintains the performance of the learned model. To solve this problem, we develop PrivacyCredit, a novel privacy-preserving machine learning method. We then theoretically demonstrate the privacy-preserving, model-confidential, and lossless properties of PrivacyCredit. Through extensive experiments using a real-world credit dataset linked with alternative data, we demonstrate the predictive value of securely incorporating alternative data into credit risk prediction and show that PrivacyCredit achieves the same predictive performance as the model learned from the insecure plaintext combination of traditional and alternative data. We further evaluate its model-confidentiality property and computational efficiency.
Persistent Story World Simulation with Continuous Character Customization
Mar 17, 2026Story visualization has gained increasing attention in computer vision. However, current methods often fail to achieve a synergy between accurate character customization, semantic alignment, and continuous integration of new identities. To tackle this challenge, in this paper we present EverTale, a story world simulator for continuous story character customization. We first propose an All-in-One-World Character Integrator to achieve continuous character adaptation within unified LoRA module, eliminating the need for per-character optimization modules of previous methods. Then, we incorporate a Character Quality Gate via MLLM-as-Judge to ensure the fidelity of each character adaptation process through chain-of-thought reasoning, determining whether the model can proceed to the next character or require additional training on the current one. We also introduce a Character-Aware Region-Focus Sampling strategy to address the identity degradation and layout conflicts in existing multi-character visual storytelling, ensuring natural multi-character generation by harmonizing local character-specific details with global scene context with higher efficiency. Experimental results show that our EverTale achieves superior performance against a wider range of compared methods on both single- and multi-character story visualization. Codes will be available.
DVD: Deterministic Video Depth Estimation with Generative Priors
Mar 12, 2026Existing video depth estimation faces a fundamental trade-off: generative models suffer from stochastic geometric hallucinations and scale drift, while discriminative models demand massive labeled datasets to resolve semantic ambiguities. To break this impasse, we present DVD, the first framework to deterministically adapt pre-trained video diffusion models into single-pass depth regressors. Specifically, DVD features three core designs: (i) repurposing the diffusion timestep as a structural anchor to balance global stability with high-frequency details; (ii) latent manifold rectification (LMR) to mitigate regression-induced over-smoothing, enforcing differential constraints to restore sharp boundaries and coherent motion; and (iii) global affine coherence, an inherent property bounding inter-window divergence, which enables seamless long-video inference without requiring complex temporal alignment. Extensive experiments demonstrate that DVD achieves state-of-the-art zero-shot performance across benchmarks. Furthermore, DVD successfully unlocks the profound geometric priors implicit in video foundation models using 163x less task-specific data than leading baselines. Notably, we fully release our pipeline, providing the whole training suite for SOTA video depth estimation to benefit the open-source community.
StereoPilot: Learning Unified and Efficient Stereo Conversion via Generative Priors
Dec 18, 2025



The rapid growth of stereoscopic displays, including VR headsets and 3D cinemas, has led to increasing demand for high-quality stereo video content. However, producing 3D videos remains costly and complex, while automatic Monocular-to-Stereo conversion is hindered by the limitations of the multi-stage ``Depth-Warp-Inpaint'' (DWI) pipeline. This paradigm suffers from error propagation, depth ambiguity, and format inconsistency between parallel and converged stereo configurations. To address these challenges, we introduce UniStereo, the first large-scale unified dataset for stereo video conversion, covering both stereo formats to enable fair benchmarking and robust model training. Building upon this dataset, we propose StereoPilot, an efficient feed-forward model that directly synthesizes the target view without relying on explicit depth maps or iterative diffusion sampling. Equipped with a learnable domain switcher and a cycle consistency loss, StereoPilot adapts seamlessly to different stereo formats and achieves improved consistency. Extensive experiments demonstrate that StereoPilot significantly outperforms state-of-the-art methods in both visual fidelity and computational efficiency. Project page: https://hit-perfect.github.io/StereoPilot/.
FactGuard: Event-Centric and Commonsense-Guided Fake News Detection
Nov 13, 2025



Fake news detection methods based on writing style have achieved remarkable progress. However, as adversaries increasingly imitate the style of authentic news, the effectiveness of such approaches is gradually diminishing. Recent research has explored incorporating large language models (LLMs) to enhance fake news detection. Yet, despite their transformative potential, LLMs remain an untapped goldmine for fake news detection, with their real-world adoption hampered by shallow functionality exploration, ambiguous usability, and prohibitive inference costs. In this paper, we propose a novel fake news detection framework, dubbed FactGuard, that leverages LLMs to extract event-centric content, thereby reducing the impact of writing style on detection performance. Furthermore, our approach introduces a dynamic usability mechanism that identifies contradictions and ambiguous cases in factual reasoning, adaptively incorporating LLM advice to improve decision reliability. To ensure efficiency and practical deployment, we employ knowledge distillation to derive FactGuard-D, enabling the framework to operate effectively in cold-start and resource-constrained scenarios. Comprehensive experiments on two benchmark datasets demonstrate that our approach consistently outperforms existing methods in both robustness and accuracy, effectively addressing the challenges of style sensitivity and LLM usability in fake news detection.
DA$^2$: Depth Anything in Any Direction
Sep 30, 2025Panorama has a full FoV (360$^\circ\times$180$^\circ$), offering a more complete visual description than perspective images. Thanks to this characteristic, panoramic depth estimation is gaining increasing traction in 3D vision. However, due to the scarcity of panoramic data, previous methods are often restricted to in-domain settings, leading to poor zero-shot generalization. Furthermore, due to the spherical distortions inherent in panoramas, many approaches rely on perspective splitting (e.g., cubemaps), which leads to suboptimal efficiency. To address these challenges, we propose $\textbf{DA}$$^{\textbf{2}}$: $\textbf{D}$epth $\textbf{A}$nything in $\textbf{A}$ny $\textbf{D}$irection, an accurate, zero-shot generalizable, and fully end-to-end panoramic depth estimator. Specifically, for scaling up panoramic data, we introduce a data curation engine for generating high-quality panoramic depth data from perspective, and create $\sim$543K panoramic RGB-depth pairs, bringing the total to $\sim$607K. To further mitigate the spherical distortions, we present SphereViT, which explicitly leverages spherical coordinates to enforce the spherical geometric consistency in panoramic image features, yielding improved performance. A comprehensive benchmark on multiple datasets clearly demonstrates DA$^{2}$'s SoTA performance, with an average 38% improvement on AbsRel over the strongest zero-shot baseline. Surprisingly, DA$^{2}$ even outperforms prior in-domain methods, highlighting its superior zero-shot generalization. Moreover, as an end-to-end solution, DA$^{2}$ exhibits much higher efficiency over fusion-based approaches. Both the code and the curated panoramic data will be released. Project page: https://depth-any-in-any-dir.github.io/.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
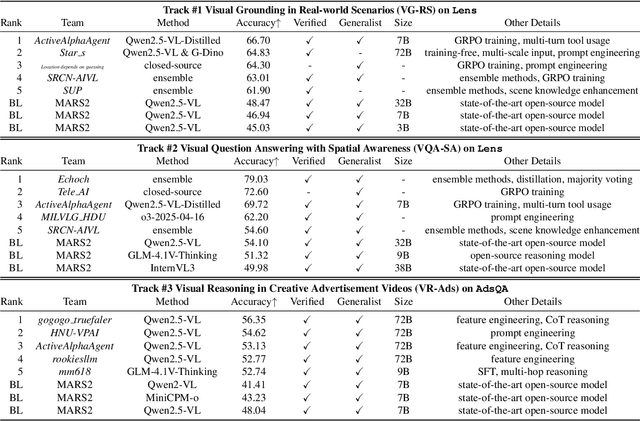

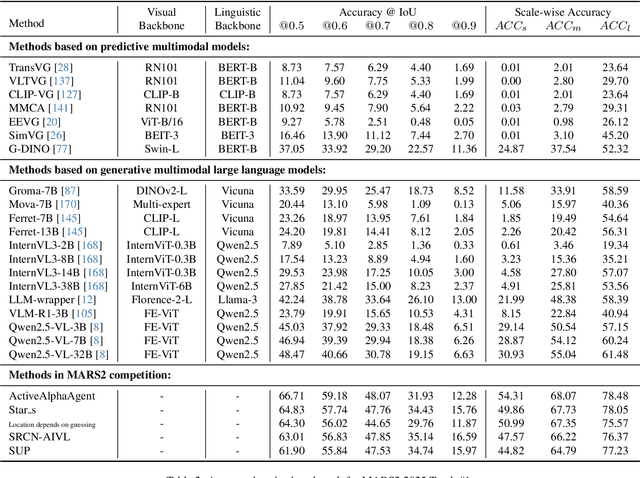
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
ContextRefine-CLIP for EPIC-KITCHENS-100 Multi-Instance Retrieval Challenge 2025
Jun 12, 2025

This report presents ContextRefine-CLIP (CR-CLIP), an efficient model for visual-textual multi-instance retrieval tasks. The approach is based on the dual-encoder AVION, on which we introduce a cross-modal attention flow module to achieve bidirectional dynamic interaction and refinement between visual and textual features to generate more context-aware joint representations. For soft-label relevance matrices provided in tasks such as EPIC-KITCHENS-100, CR-CLIP can work with Symmetric Multi-Similarity Loss to achieve more accurate semantic alignment and optimization using the refined features. Without using ensemble learning, the CR-CLIP model achieves 66.78mAP and 82.08nDCG on the EPIC-KITCHENS-100 public leaderboard, which significantly outperforms the baseline model and fully validates its effectiveness in cross-modal retrieval. The code will be released open-source on https://github.com/delCayr/ContextRefine-Clip
The Sound of Populism: Distinct Linguistic Features Across Populist Variants
May 10, 2025This study explores the sound of populism by integrating the classic Linguistic Inquiry and Word Count (LIWC) features, which capture the emotional and stylistic tones of language, with a fine-tuned RoBERTa model, a state-of-the-art context-aware language model trained to detect nuanced expressions of populism. This approach allows us to uncover the auditory dimensions of political rhetoric in U.S. presidential inaugural and State of the Union addresses. We examine how four key populist dimensions (i.e., left-wing, right-wing, anti-elitism, and people-centrism) manifest in the linguistic markers of speech, drawing attention to both commonalities and distinct tonal shifts across these variants. Our findings reveal that populist rhetoric consistently features a direct, assertive ``sound" that forges a connection with ``the people'' and constructs a charismatic leadership persona. However, this sound is not simply informal but strategically calibrated. Notably, right-wing populism and people-centrism exhibit a more emotionally charged discourse, resonating with themes of identity, grievance, and crisis, in contrast to the relatively restrained emotional tones of left-wing and anti-elitist expressions.
Jasmine: Harnessing Diffusion Prior for Self-supervised Depth Estimation
Mar 20, 2025



In this paper, we propose Jasmine, the first Stable Diffusion (SD)-based self-supervised framework for monocular depth estimation, which effectively harnesses SD's visual priors to enhance the sharpness and generalization of unsupervised prediction. Previous SD-based methods are all supervised since adapting diffusion models for dense prediction requires high-precision supervision. In contrast, self-supervised reprojection suffers from inherent challenges (e.g., occlusions, texture-less regions, illumination variance), and the predictions exhibit blurs and artifacts that severely compromise SD's latent priors. To resolve this, we construct a novel surrogate task of hybrid image reconstruction. Without any additional supervision, it preserves the detail priors of SD models by reconstructing the images themselves while preventing depth estimation from degradation. Furthermore, to address the inherent misalignment between SD's scale and shift invariant estimation and self-supervised scale-invariant depth estimation, we build the Scale-Shift GRU. It not only bridges this distribution gap but also isolates the fine-grained texture of SD output against the interference of reprojection loss. Extensive experiments demonstrate that Jasmine achieves SoTA performance on the KITTI benchmark and exhibits superior zero-shot generalization across multiple datasets.