 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Review of RNA Language Models
May 14, 2025



Given usefulness of protein language models (LMs) in structure and functional inference, RNA LMs have received increased attentions in the last few years. However, these RNA models are often not compared against the same standard. Here, we divided RNA LMs into three classes (pretrained on multiple RNA types (especially noncoding RNAs), specific-purpose RNAs, and LMs that unify RNA with DNA or proteins or both) and compared 13 RNA LMs along with 3 DNA and 1 protein LMs as controls in zero-shot prediction of RNA secondary structure and functional classification. Results shows that the models doing well on secondary structure prediction often perform worse in function classification or vice versa, suggesting that more balanced unsupervised training is needed.
FlexSpeech: Towards Stable, Controllable and Expressive Text-to-Speech
May 08, 2025Current speech generation research can be categorized into two primary classes: non-autoregressive and autoregressive. The fundamental distinction between these approaches lies in the duration prediction strategy employed for predictable-length sequences. The NAR methods ensure stability in speech generation by explicitly and independently modeling the duration of each phonetic unit. Conversely, AR methods employ an autoregressive paradigm to predict the compressed speech token by implicitly modeling duration with Markov properties. Although this approach improves prosody, it does not provide the structural guarantees necessary for stability. To simultaneously address the issues of stability and naturalness in speech generation, we propose FlexSpeech, a stable, controllable, and expressive TTS model. The motivation behind FlexSpeech is to incorporate Markov dependencies and preference optimization directly on the duration predictor to boost its naturalness while maintaining explicit modeling of the phonetic units to ensure stability. Specifically, we decompose the speech generation task into two components: an AR duration predictor and a NAR acoustic model. The acoustic model is trained on a substantial amount of data to learn to render audio more stably, given reference audio prosody and phone durations. The duration predictor is optimized in a lightweight manner for different stylistic variations, thereby enabling rapid style transfer while maintaining a decoupled relationship with the specified speaker timbre. Experimental results demonstrate that our approach achieves SOTA stability and naturalness in zero-shot TTS. More importantly, when transferring to a specific stylistic domain, we can accomplish lightweight optimization of the duration module solely with about 100 data samples, without the need to adjust the acoustic model, thereby enabling rapid and stable style transfer.
GraspVLA: a Grasping Foundation Model Pre-trained on Billion-scale Synthetic Action Data
May 06, 2025



Embodied foundation models are gaining increasing attention for their zero-shot generalization, scalability, and adaptability to new tasks through few-shot post-training. However, existing models rely heavily on real-world data, which is costly and labor-intensive to collect. Synthetic data offers a cost-effective alternative, yet its potential remains largely underexplored. To bridge this gap, we explore the feasibility of training Vision-Language-Action models entirely with large-scale synthetic action data. We curate SynGrasp-1B, a billion-frame robotic grasping dataset generated in simulation with photorealistic rendering and extensive domain randomization. Building on this, we present GraspVLA, a VLA model pretrained on large-scale synthetic action data as a foundational model for grasping tasks. GraspVLA integrates autoregressive perception tasks and flow-matching-based action generation into a unified Chain-of-Thought process, enabling joint training on synthetic action data and Internet semantics data. This design helps mitigate sim-to-real gaps and facilitates the transfer of learned actions to a broader range of Internet-covered objects, achieving open-vocabulary generalization in grasping. Extensive evaluations across real-world and simulation benchmarks demonstrate GraspVLA's advanced zero-shot generalizability and few-shot adaptability to specific human preferences. We will release SynGrasp-1B dataset and pre-trained weights to benefit the community.
Dexonomy: Synthesizing All Dexterous Grasp Types in a Grasp Taxonomy
Apr 26, 2025Generalizable dexterous grasping with suitable grasp types is a fundamental skill for intelligent robots. Developing such skills requires a large-scale and high-quality dataset that covers numerous grasp types (i.e., at least those categorized by the GRASP taxonomy), but collecting such data is extremely challenging. Existing automatic grasp synthesis methods are often limited to specific grasp types or object categories, hindering scalability. This work proposes an efficient pipeline capable of synthesizing contact-rich, penetration-free, and physically plausible grasps for any grasp type, object, and articulated hand. Starting from a single human-annotated template for each hand and grasp type, our pipeline tackles the complicated synthesis problem with two stages: optimize the object to fit the hand template first, and then locally refine the hand to fit the object in simulation. To validate the synthesized grasps, we introduce a contact-aware control strategy that allows the hand to apply the appropriate force at each contact point to the object. Those validated grasps can also be used as new grasp templates to facilitate future synthesis. Experiments show that our method significantly outperforms previous type-unaware grasp synthesis baselines in simulation. Using our algorithm, we construct a dataset containing 10.7k objects and 9.5M grasps, covering 31 grasp types in the GRASP taxonomy. Finally, we train a type-conditional generative model that successfully performs the desired grasp type from single-view object point clouds, achieving an 82.3% success rate in real-world experiments. Project page: https://pku-epic.github.io/Dexonomy.
High-fidelity 3D Object Generation from Single Image with RGBN-Volume Gaussian Reconstruction Model
Apr 02, 2025Recently single-view 3D generation via Gaussian splatting has emerged and developed quickly. They learn 3D Gaussians from 2D RGB images generated from pre-trained multi-view diffusion (MVD) models, and have shown a promising avenue for 3D generation through a single image. Despite the current progress, these methods still suffer from the inconsistency jointly caused by the geometric ambiguity in the 2D images, and the lack of structure of 3D Gaussians, leading to distorted and blurry 3D object generation. In this paper, we propose to fix these issues by GS-RGBN, a new RGBN-volume Gaussian Reconstruction Model designed to generate high-fidelity 3D objects from single-view images. Our key insight is a structured 3D representation can simultaneously mitigate the afore-mentioned two issues. To this end, we propose a novel hybrid Voxel-Gaussian representation, where a 3D voxel representation contains explicit 3D geometric information, eliminating the geometric ambiguity from 2D images. It also structures Gaussians during learning so that the optimization tends to find better local optima. Our 3D voxel representation is obtained by a fusion module that aligns RGB features and surface normal features, both of which can be estimated from 2D images. Extensive experiments demonstrate the superiority of our methods over prior works in terms of high-quality reconstruction results, robust generalization, and good efficiency.
DyWA: Dynamics-adaptive World Action Model for Generalizable Non-prehensile Manipulation
Mar 21, 2025Nonprehensile manipulation is crucial for handling objects that are too thin, large, or otherwise ungraspable in unstructured environments. While conventional planning-based approaches struggle with complex contact modeling, learning-based methods have recently emerged as a promising alternative. However, existing learning-based approaches face two major limitations: they heavily rely on multi-view cameras and precise pose tracking, and they fail to generalize across varying physical conditions, such as changes in object mass and table friction. To address these challenges, we propose the Dynamics-Adaptive World Action Model (DyWA), a novel framework that enhances action learning by jointly predicting future states while adapting to dynamics variations based on historical trajectories. By unifying the modeling of geometry, state, physics, and robot actions, DyWA enables more robust policy learning under partial observability. Compared to baselines, our method improves the success rate by 31.5% using only single-view point cloud observations in the simulation. Furthermore, DyWA achieves an average success rate of 68% in real-world experiments, demonstrating its ability to generalize across diverse object geometries, adapt to varying table friction, and robustness in challenging scenarios such as half-filled water bottles and slippery surfaces.
Learning Extremely High Density Crowds as Active Matters
Mar 15, 2025



Video-based high-density crowd analysis and prediction has been a long-standing topic in computer vision. It is notoriously difficult due to, but not limited to, the lack of high-quality data and complex crowd dynamics. Consequently, it has been relatively under studied. In this paper, we propose a new approach that aims to learn from in-the-wild videos, often with low quality where it is difficult to track individuals or count heads. The key novelty is a new physics prior to model crowd dynamics. We model high-density crowds as active matter, a continumm with active particles subject to stochastic forces, named 'crowd material'. Our physics model is combined with neural networks, resulting in a neural stochastic differential equation system which can mimic the complex crowd dynamics. Due to the lack of similar research, we adapt a range of existing methods which are close to ours for comparison. Through exhaustive evaluation, we show our model outperforms existing methods in analyzing and forecasting extremely high-density crowds. Furthermore, since our model is a continuous-time physics model, it can be used for simulation and analysis, providing strong interpretability. This is categorically different from most deep learning methods, which are discrete-time models and black-boxes.
3D Student Splatting and Scooping
Mar 13, 2025



Recently, 3D Gaussian Splatting (3DGS) provides a new framework for novel view synthesis, and has spiked a new wave of research in neural rendering and related applications. As 3DGS is becoming a foundational component of many models, any improvement on 3DGS itself can bring huge benefits. To this end, we aim to improve the fundamental paradigm and formulation of 3DGS. We argue that as an unnormalized mixture model, it needs to be neither Gaussians nor splatting. We subsequently propose a new mixture model consisting of flexible Student's t distributions, with both positive (splatting) and negative (scooping) densities. We name our model Student Splatting and Scooping, or SSS. When providing better expressivity, SSS also poses new challenges in learning. Therefore, we also propose a new principled sampling approach for optimization. Through exhaustive evaluation and comparison, across multiple datasets, settings, and metrics, we demonstrate that SSS outperforms existing methods in terms of quality and parameter efficiency, e.g. achieving matching or better quality with similar numbers of components, and obtaining comparable results while reducing the component number by as much as 82%.
Towards Universal Learning-based Model for Cardiac Image Reconstruction: Summary of the CMRxRecon2024 Challenge
Mar 05, 2025Cardiovascular magnetic resonance (CMR) offers diverse imaging contrasts for assessment of cardiac function and tissue characterization. However, acquiring each single CMR modality is often time-consuming, and comprehensive clinical protocols require multiple modalities with various sampling patterns, further extending the overall acquisition time and increasing susceptibility to motion artifacts. Existing deep learning-based reconstruction methods are often designed for specific acquisition parameters, which limits their ability to generalize across a variety of scan scenarios. As part of the CMRxRecon Series, the CMRxRecon2024 challenge provides diverse datasets encompassing multi-modality multi-view imaging with various sampling patterns, and a platform for the international community to develop and benchmark reconstruction solutions in two well-crafted tasks. Task 1 is a modality-universal setting, evaluating the out-of-distribution generalization of the reconstructed model, while Task 2 follows sampling-universal setting assessing the one-for-all adaptability of the universal model. Main contributions include providing the first and largest publicly available multi-modality, multi-view cardiac k-space dataset; developing a benchmarking platform that simulates clinical acceleration protocols, with a shared code library and tutorial for various k-t undersampling patterns and data processing; giving technical insights of enhanced data consistency based on physic-informed networks and adaptive prompt-learning embedding to be versatile to different clinical settings; additional finding on evaluation metrics to address the limitations of conventional ground-truth references in universal reconstruction tasks.
Building Machine Learning Challenges for Anomaly Detection in Science
Mar 03, 2025
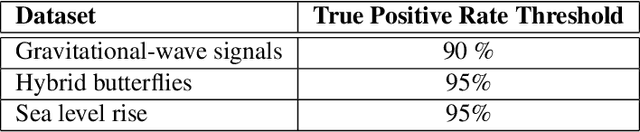


Scientific discoveries are often made by finding a pattern or object that was not predicted by the known rules of science. Oftentimes, these anomalous events or objects that do not conform to the norms are an indication that the rules of science governing the data are incomplete, and something new needs to be present to explain these unexpected outliers. The challenge of finding anomalies can be confounding since it requires codifying a complete knowledge of the known scientific behaviors and then projecting these known behaviors on the data to look for deviations. When utilizing machine learning, this presents a particular challenge since we require that the model not only understands scientific data perfectly but also recognizes when the data is inconsistent and out of the scope of its trained behavior. In this paper, we present three datasets aimed at developing machine learning-based anomaly detection for disparate scientific domains covering astrophysics, genomics, and polar science. We present the different datasets along with a scheme to make machine learning challenges around the three datasets findable, accessible, interoperable, and reusable (FAIR). Furthermore, we present an approach that generalizes to future machine learning challenges, enabling the possibility of large, more compute-intensive challenges that can ultimately lead to scientific discovery.