 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigiFace-1M: 1 Million Digital Face Images for Face Recognition
Oct 05, 2022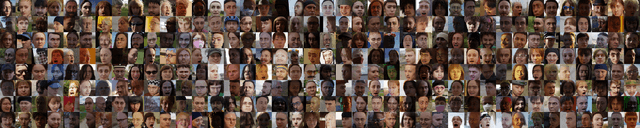

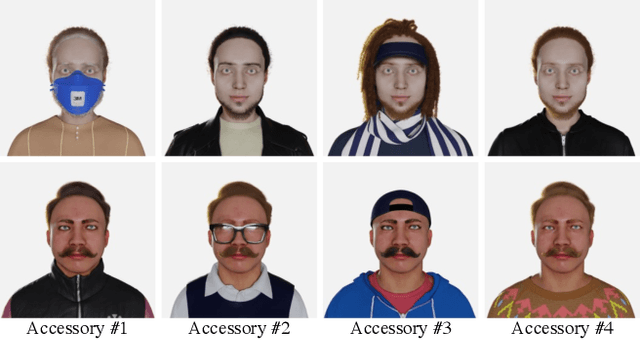
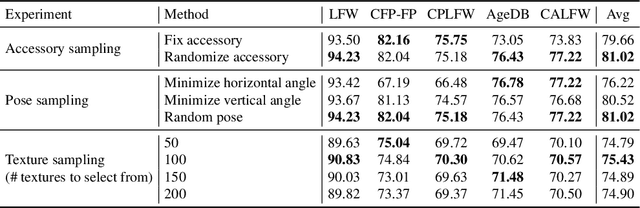
State-of-the-art face recognition models show impressive accuracy, achieving over 99.8% on Labeled Faces in the Wild (LFW) dataset. Such models are trained on large-scale datasets that contain millions of real human face images collected from the internet. Web-crawled face images are severely biased (in terms of race, lighting, make-up, etc) and often contain label noise. More importantly, the face images are collected without explicit consent, raising ethical concerns. To avoid such problems, we introduce a large-scale synthetic dataset for face recognition, obtained by rendering digital faces using a computer graphics pipeline. We first demonstrate that aggressive data augmentation can significantly reduce the synthetic-to-real domain gap. Having full control over the rendering pipeline, we also study how each attribute (e.g., variation in facial pose, accessories and textures) affects the accuracy. Compared to SynFace, a recent method trained on GAN-generated synthetic faces, we reduce the error rate on LFW by 52.5% (accuracy from 91.93% to 96.17%). By fine-tuning the network on a smaller number of real face images that could reasonably be obtained with consent, we achieve accuracy that is comparable to the methods trained on millions of real face images.
Explicitly Controllable 3D-Aware Portrait Generation
Sep 20, 2022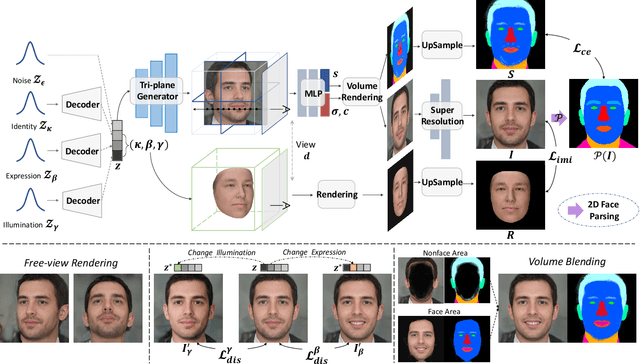
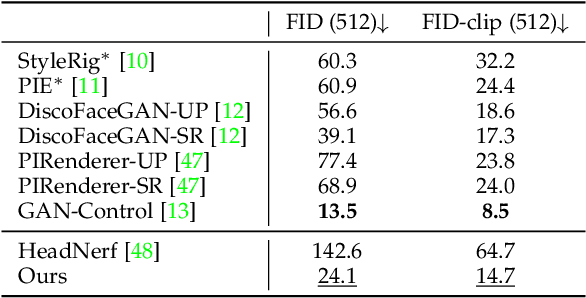
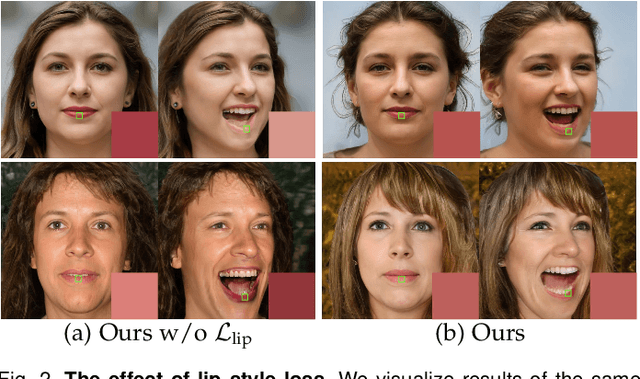
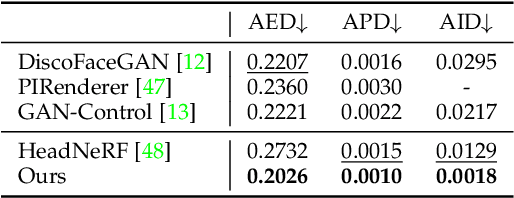
In contrast to the traditional avatar creation pipeline which is a costly process, contemporary generative approaches directly learn the data distribution from photographs. While plenty of works extend unconditional generative models and achieve some levels of controllability, it is still challenging to ensure multi-view consistency, especially in large poses. In this work, we propose a network that generates 3D-aware portraits while being controllable according to semantic parameters regarding pose, identity, expression and illumination. Our network uses neural scene representation to model 3D-aware portraits, whose generation is guided by a parametric face model that supports explicit control. While the latent disentanglement can be further enhanced by contrasting images with partially different attributes, there still exists noticeable inconsistency in non-face areas, e.g., hair and background, when animating expressions. Wesolve this by proposing a volume blending strategy in which we form a composite output by blending dynamic and static areas, with two parts segmented from the jointly learned semantic field. Our method outperforms prior arts in extensive experiments, producing realistic portraits with vivid expression in natural lighting when viewed from free viewpoints. It also demonstrates generalization ability to real images as well as out-of-domain data, showing great promise in real applications.
MaskCLIP: Masked Self-Distillation Advances Contrastive Language-Image Pretraining
Aug 25, 2022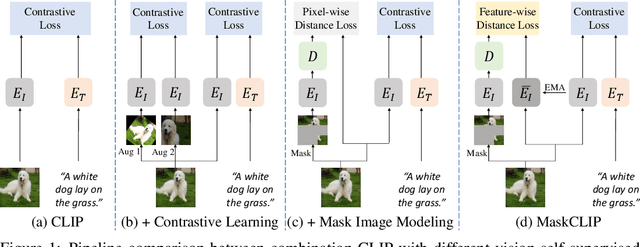
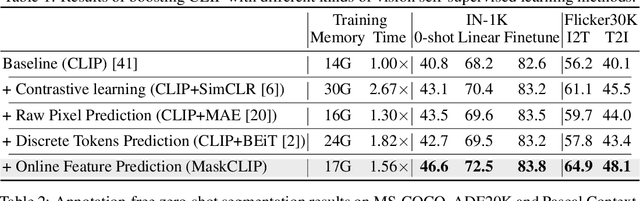
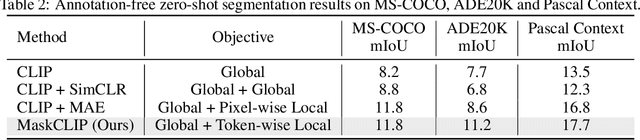
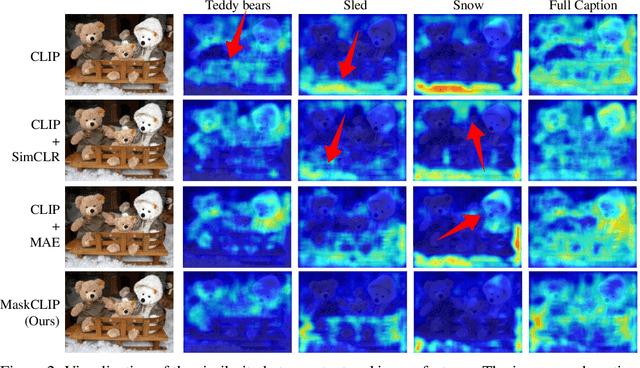
This paper presents a simple yet effective framework MaskCLIP, which incorporates a newly proposed masked self-distillation into contrastive language-image pretraining. The core idea of masked self-distillation is to distill representation from a full image to the representation predicted from a masked image. Such incorporation enjoys two vital benefits. First, masked self-distillation targets local patch representation learning, which is complementary to vision-language contrastive focusing on text-related representation.Second, masked self-distillation is also consistent with vision-language contrastive from the perspective of training objective as both utilize the visual encoder for feature aligning, and thus is able to learn local semantics getting indirect supervision from the language. We provide specially designed experiments with a comprehensive analysis to validate the two benefits. Empirically, we show that MaskCLIP, when applied to various challenging downstream tasks, achieves superior results in linear probing, finetuning as well as the zero-shot performance with the guidance of the language encoder.
Event-Triggered Model Predictive Control with Deep Reinforcement Learning for Autonomous Driving
Aug 22, 2022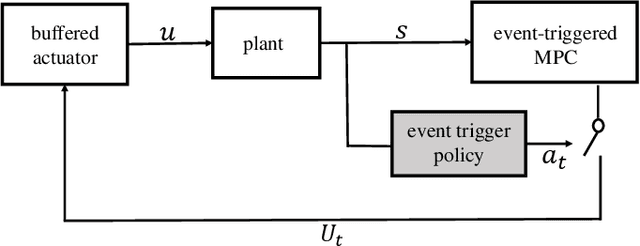
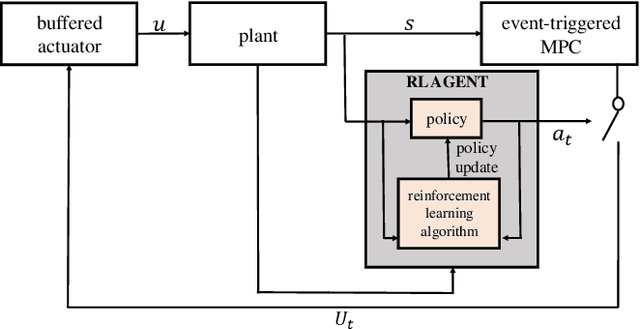
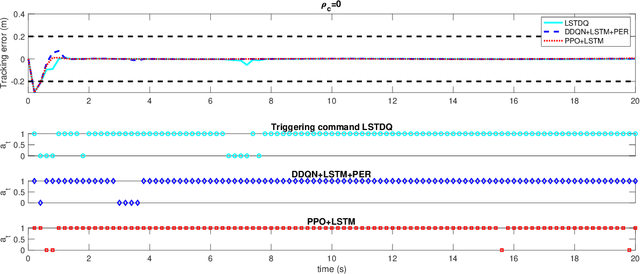
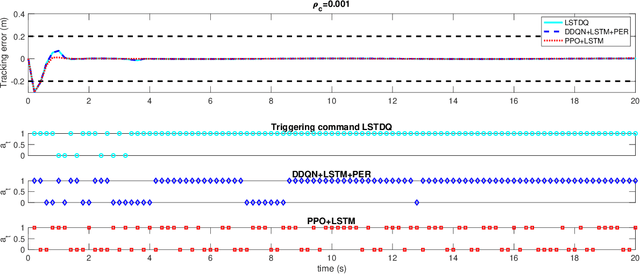
Event-triggered model predictive control (eMPC) is a popular optimal control method with an aim to alleviate the computation and/or communication burden of MPC. However, it generally requires priori knowledge of the closed-loop system behavior along with the communication characteristics for designing the event-trigger policy. This paper attempts to solve this challenge by proposing an efficient eMPC framework and demonstrate successful implementation of this framework on the autonomous vehicle path following. First of all, a model-free reinforcement learning (RL) agent is used to learn the optimal event-trigger policy without the need for a complete dynamical system and communication knowledge in this framework. Furthermore, techniques including prioritized experience replay (PER) buffer and long-short term memory (LSTM) are employed to foster exploration and improve training efficiency. In this paper, we use the proposed framework with three deep RL algorithms, i.e., Double Q-learning (DDQN), Proximal Policy Optimization (PPO), and Soft Actor-Critic (SAC), to solve this problem. Experimental results show that all three deep RL-based eMPC (deep-RL-eMPC) can achieve better evaluation performance than the conventional threshold-based and previous linear Q-based approach in the autonomous path following. In particular, PPO-eMPC with LSTM and DDQN-eMPC with PER and LSTM obtains a superior balance between the closed-loop control performance and event-trigger frequency. The associated code is open-sourced and available at: https://github.com/DangFengying/RL-based-event-triggered-MPC.
Bootstrapped Masked Autoencoders for Vision BERT Pretraining
Jul 14, 2022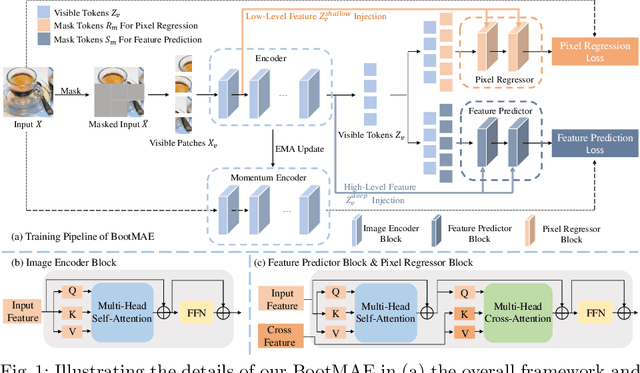


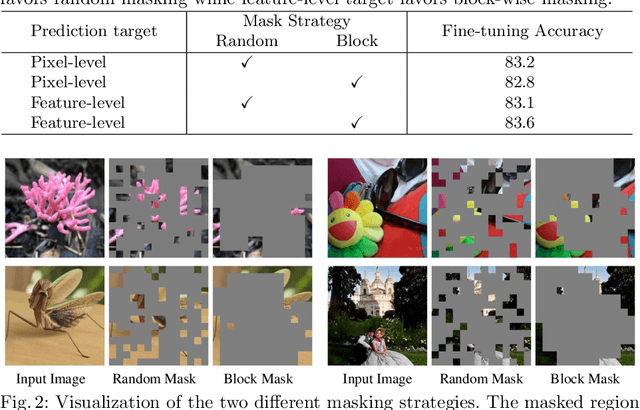
We propose bootstrapped masked autoencoders (BootMAE), a new approach for vision BERT pretraining. BootMAE improves the original masked autoencoders (MAE) with two core designs: 1) momentum encoder that provides online feature as extra BERT prediction targets; 2) target-aware decoder that tries to reduce the pressure on the encoder to memorize target-specific information in BERT pretraining. The first design is motivated by the observation that using a pretrained MAE to extract the features as the BERT prediction target for masked tokens can achieve better pretraining performance. Therefore, we add a momentum encoder in parallel with the original MAE encoder, which bootstraps the pretraining performance by using its own representation as the BERT prediction target. In the second design, we introduce target-specific information (e.g., pixel values of unmasked patches) from the encoder directly to the decoder to reduce the pressure on the encoder of memorizing the target-specific information. Thus, the encoder focuses on semantic modeling, which is the goal of BERT pretraining, and does not need to waste its capacity in memorizing the information of unmasked tokens related to the prediction target. Through extensive experiments, our BootMAE achieves $84.2\%$ Top-1 accuracy on ImageNet-1K with ViT-B backbone, outperforming MAE by $+0.8\%$ under the same pre-training epochs. BootMAE also gets $+1.0$ mIoU improvements on semantic segmentation on ADE20K and $+1.3$ box AP, $+1.4$ mask AP improvement on object detection and segmentation on COCO dataset. Code is released at https://github.com/LightDXY/BootMAE.
Semantic Image Synthesis via Diffusion Models
Jun 30, 2022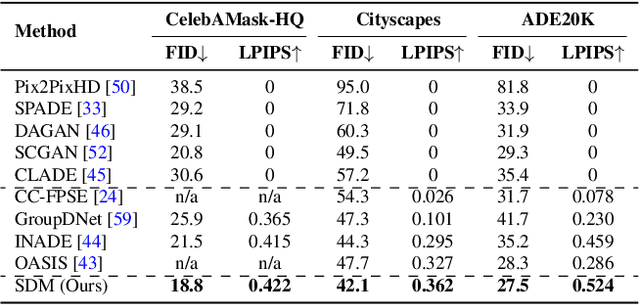
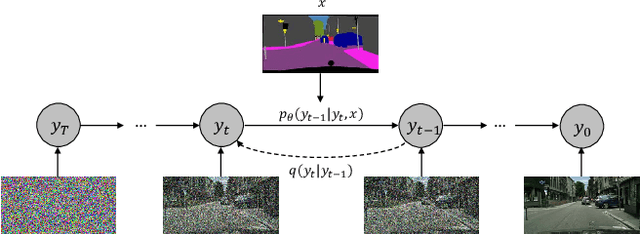
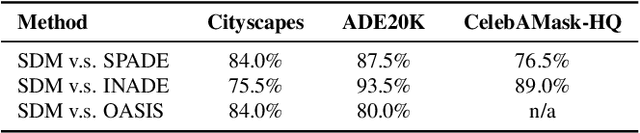
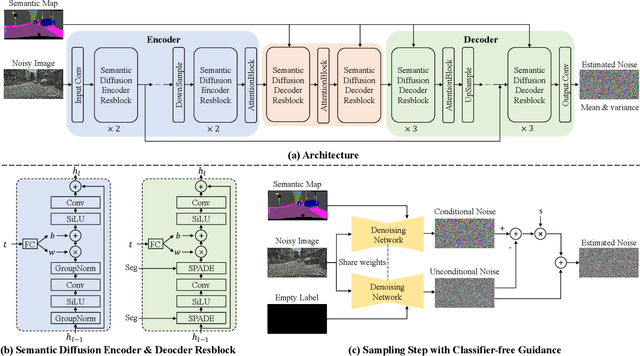
Denoising Diffusion Probabilistic Models (DDPMs) have achieved remarkable success in various image generation tasks compared with Generative Adversarial Nets (GANs). Recent work on semantic image synthesis mainly follows the \emph{de facto} GAN-based approaches, which may lead to unsatisfactory quality or diversity of generated images. In this paper, we propose a novel framework based on DDPM for semantic image synthesis. Unlike previous conditional diffusion model directly feeds the semantic layout and noisy image as input to a U-Net structure, which may not fully leverage the information in the input semantic mask, our framework processes semantic layout and noisy image differently. It feeds noisy image to the encoder of the U-Net structure while the semantic layout to the decoder by multi-layer spatially-adaptive normalization operators. To further improve the generation quality and semantic interpretability in semantic image synthesis, we introduce the classifier-free guidance sampling strategy, which acknowledge the scores of an unconditional model for sampling process. Extensive experiments on three benchmark datasets demonstrate the effectiveness of our proposed method, achieving state-of-the-art performance in terms of fidelity~(FID) and diversity~(LPIPS).
I^2R-Net: Intra- and Inter-Human Relation Network for Multi-Person Pose Estimation
Jun 27, 2022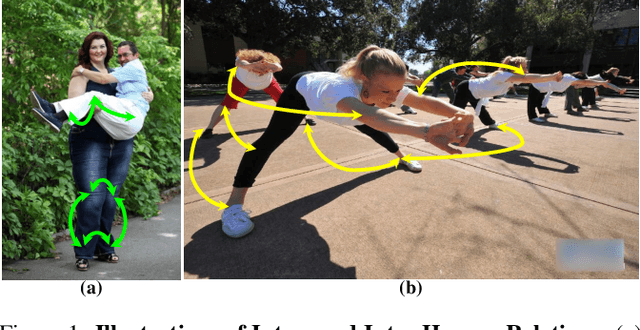
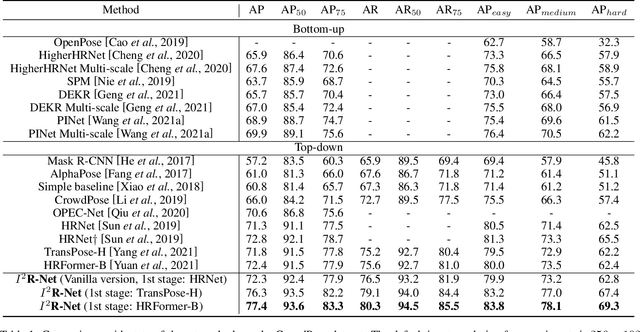
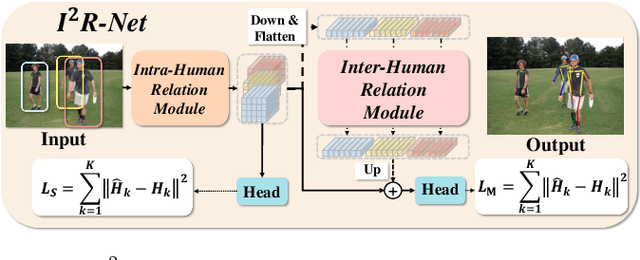
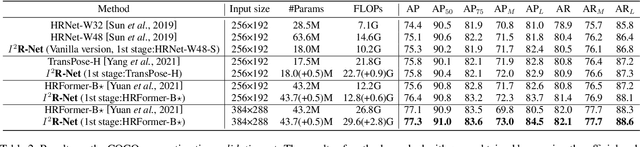
In this paper, we present the Intra- and Inter-Human Relation Networks (I^2R-Net) for Multi-Person Pose Estimation. It involves two basic modules. First, the Intra-Human Relation Module operates on a single person and aims to capture Intra-Human dependencies. Second, the Inter-Human Relation Module considers the relation between multiple instances and focuses on capturing Inter-Human interactions. The Inter-Human Relation Module can be designed very lightweight by reducing the resolution of feature map, yet learn useful relation information to significantly boost the performance of the Intra-Human Relation Module. Even without bells and whistles, our method can compete or outperform current competition winners. We conduct extensive experiments on COCO, CrowdPose, and OCHuman datasets. The results demonstrate that the proposed model surpasses all the state-of-the-art methods. Concretely, the proposed method achieves 77.4% AP on CrowPose dataset and 67.8% AP on OCHuman dataset respectively, outperforming existing methods by a large margin. Additionally, the ablation study and visualization analysis also prove the effectiveness of our model.
Robust Meta-learning with Sampling Noise and Label Noise via Eigen-Reptile
Jun 04, 2022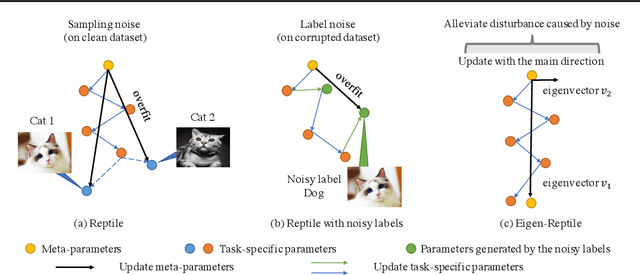
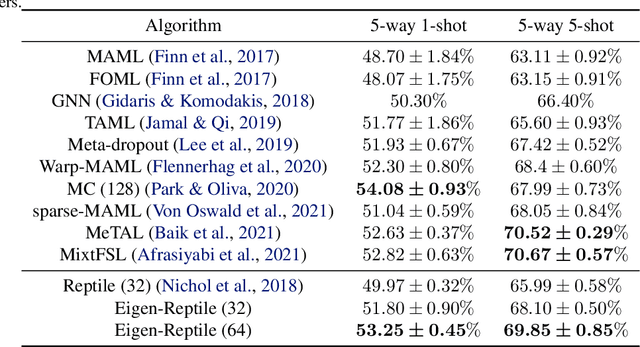
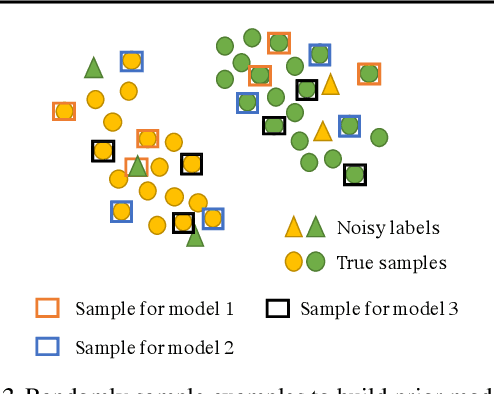
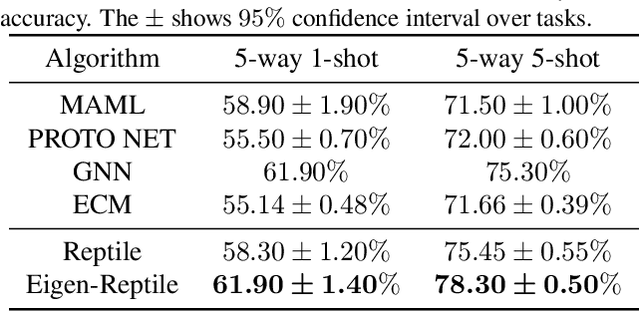
Recent years have seen a surge of interest in meta-learning techniques for tackling the few-shot learning (FSL) problem. However, the meta-learner is prone to overfitting since there are only a few available samples, which can be identified as sampling noise on a clean dataset. Moreover, when handling the data with noisy labels, the meta-learner could be extremely sensitive to label noise on a corrupted dataset. To address these two challenges, we present Eigen-Reptile (ER) that updates the meta-parameters with the main direction of historical task-specific parameters to alleviate sampling and label noise. Specifically, the main direction is computed in a fast way, where the scale of the calculated matrix is related to the number of gradient steps instead of the number of parameters. Furthermore, to obtain a more accurate main direction for Eigen-Reptile in the presence of many noisy labels, we further propose Introspective Self-paced Learning (ISPL). We have theoretically and experimentally demonstrated the soundness and effectiveness of the proposed Eigen-Reptile and ISPL. Particularly, our experiments on different tasks show that the proposed method is able to outperform or achieve highly competitive performance compared with other gradient-based methods with or without noisy labels. The code and data for the proposed method are provided for research purposes https://github.com/Anfeather/Eigen-Reptile.
Improved Vector Quantized Diffusion Models
May 31, 2022
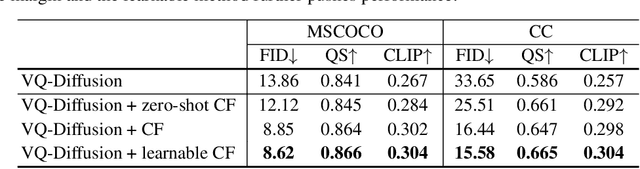
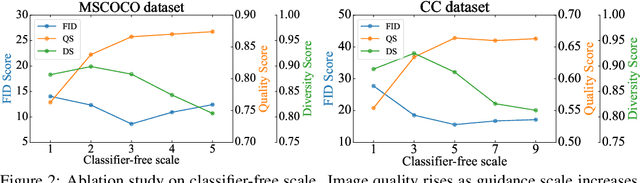
Vector quantized diffusion (VQ-Diffusion) is a powerful generative model for text-to-image synthesis, but sometimes can still generate low-quality samples or weakly correlated images with text input. We find these issues are mainly due to the flawed sampling strategy. In this paper, we propose two important techniques to further improve the sample quality of VQ-Diffusion. 1) We explore classifier-free guidance sampling for discrete denoising diffusion model and propose a more general and effective implementation of classifier-free guidance. 2) We present a high-quality inference strategy to alleviate the joint distribution issue in VQ-Diffusion. Finally, we conduct experiments on various datasets to validate their effectiveness and show that the improved VQ-Diffusion suppresses the vanilla version by large margins. We achieve an 8.44 FID score on MSCOCO, surpassing VQ-Diffusion by 5.42 FID score. When trained on ImageNet, we dramatically improve the FID score from 11.89 to 4.83, demonstrating the superiority of our proposed techniques.
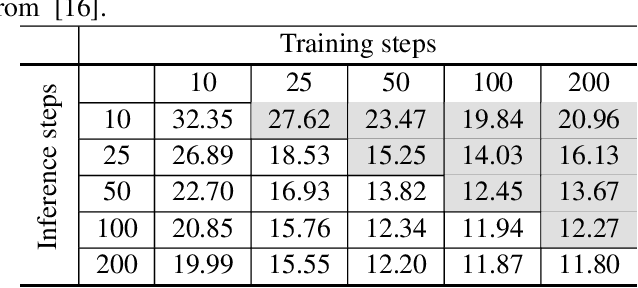
Contrastive Learning Rivals Masked Image Modeling in Fine-tuning via Feature Distillation
May 27, 2022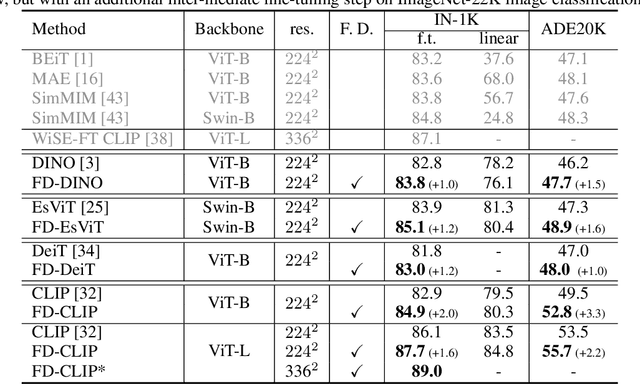
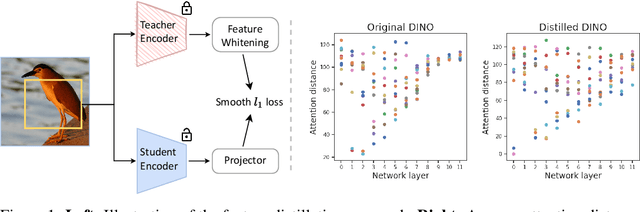
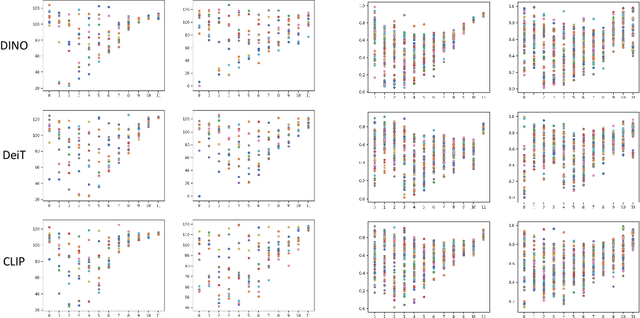
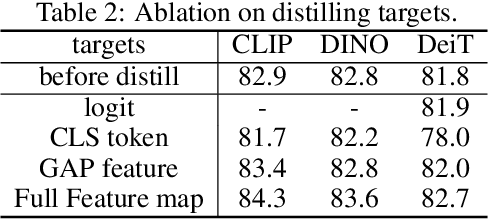
Masked image modeling (MIM) learns representations with remarkably good fine-tuning performances, overshadowing previous prevalent pre-training approaches such as image classification, instance contrastive learning, and image-text alignment. In this paper, we show that the inferior fine-tuning performance of these pre-training approaches can be significantly improved by a simple post-processing in the form of feature distillation (FD). The feature distillation converts the old representations to new representations that have a few desirable properties just like those representations produced by MIM. These properties, which we aggregately refer to as optimization friendliness, are identified and analyzed by a set of attention- and optimization-related diagnosis tools. With these properties, the new representations show strong fine-tuning performance. Specifically, the contrastive self-supervised learning methods are made as competitive in fine-tuning as the state-of-the-art masked image modeling (MIM) algorithms. The CLIP models' fine-tuning performance is also significantly improved, with a CLIP ViT-L model reaching 89.0% top-1 accuracy on ImageNet-1K classification. More importantly, our work provides a way for the future research to focus more effort on the generality and scalability of the learnt representations without being pre-occupied with optimization friendliness since it can be enhanced rather easily. The code will be available at https://github.com/SwinTransformer/Feature-Distillation.