 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandoverSim: A Simulation Framework and Benchmark for Human-to-Robot Object Handovers
May 19, 2022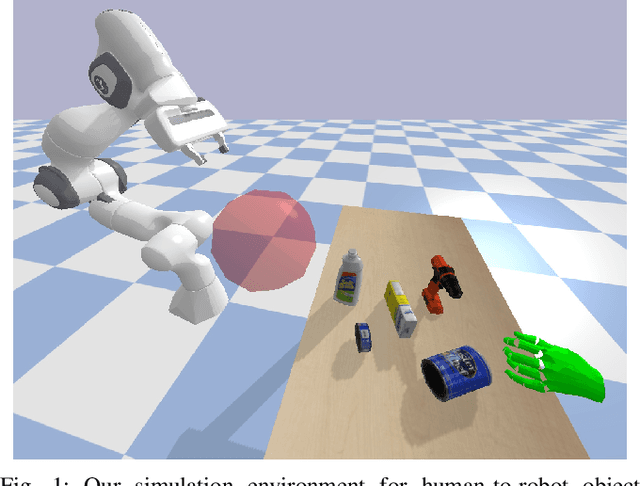

We introduce a new simulation benchmark "HandoverSim" for human-to-robot object handovers. To simulate the giver's motion, we leverage a recent motion capture dataset of hand grasping of objects. We create training and evaluation environments for the receiver with standardized protocols and metrics. We analyze the performance of a set of baselines and show a correlation with a real-world evaluation. Code is open sourced at https://handover-sim.github.io.
Correcting Robot Plans with Natural Language Feedback
Apr 11, 2022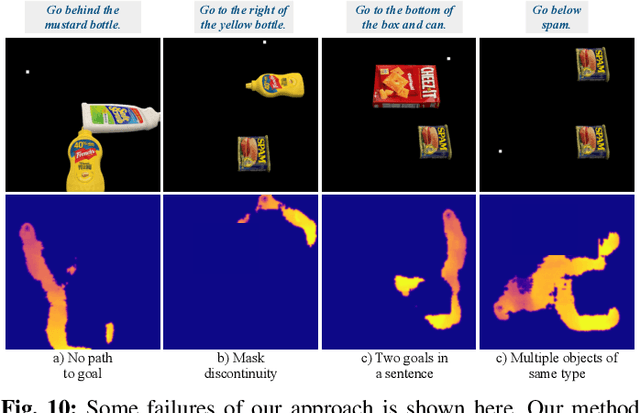
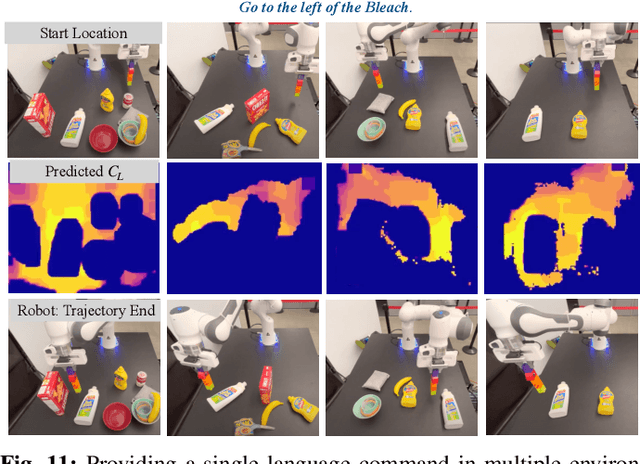

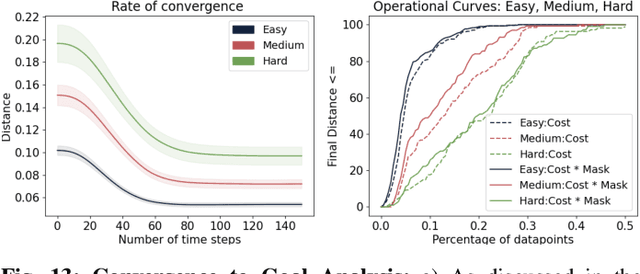
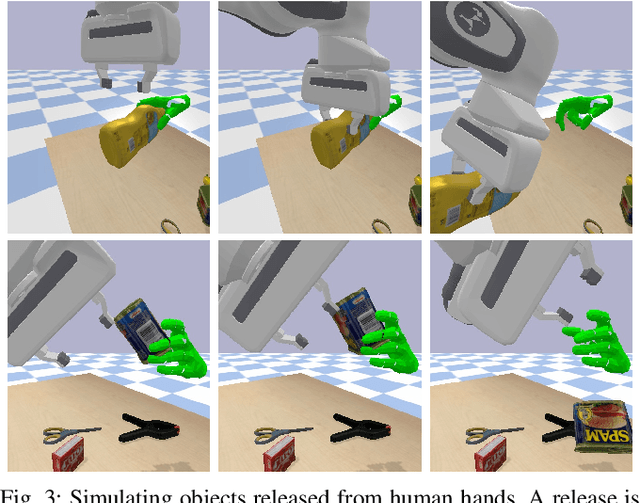
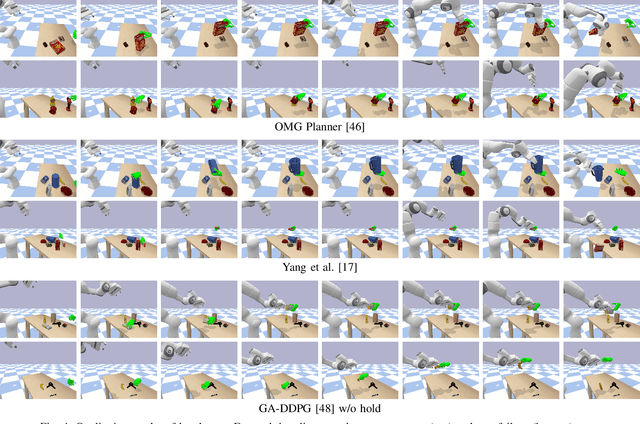
When humans design cost or goal specifications for robots, they often produce specifications that are ambiguous, underspecified, or beyond planners' ability to solve. In these cases, corrections provide a valuable tool for human-in-the-loop robot control. Corrections might take the form of new goal specifications, new constraints (e.g. to avoid specific objects), or hints for planning algorithms (e.g. to visit specific waypoints). Existing correction methods (e.g. using a joystick or direct manipulation of an end effector) require full teleoperation or real-time interaction. In this paper, we explore natural language as an expressive and flexible tool for robot correction. We describe how to map from natural language sentences to transformations of cost functions. We show that these transformations enable users to correct goals, update robot motions to accommodate additional user preferences, and recover from planning errors. These corrections can be leveraged to get 81% and 93% success rates on tasks where the original planner failed, with either one or two language corrections. Our method makes it possible to compose multiple constraints and generalizes to unseen scenes, objects, and sentences in simulated environments and real-world environments.
Model Predictive Control for Fluid Human-to-Robot Handovers
Mar 31, 2022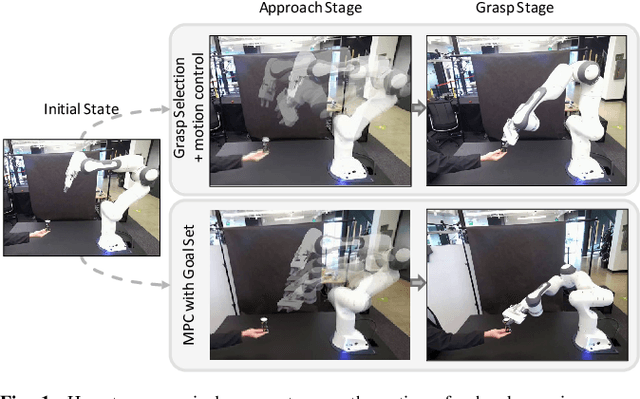

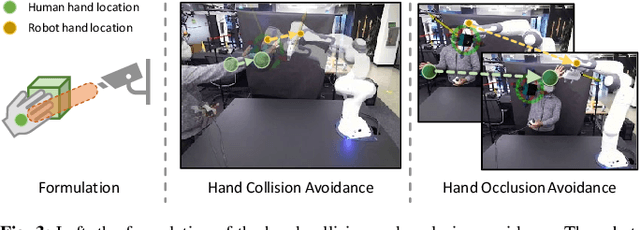
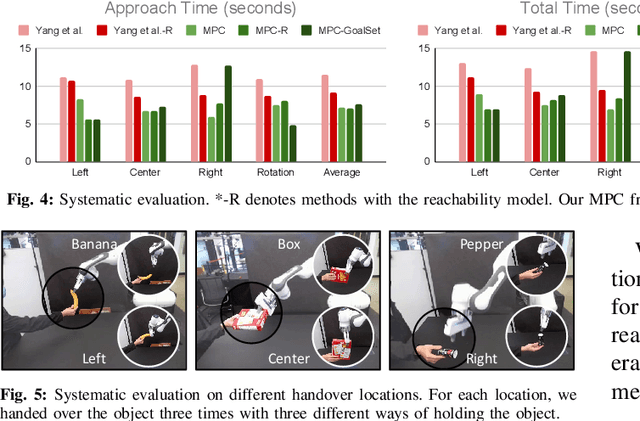
Human-robot handover is a fundamental yet challenging task in human-robot interaction and collaboration. Recently, remarkable progressions have been made in human-to-robot handovers of unknown objects by using learning-based grasp generators. However, how to responsively generate smooth motions to take an object from a human is still an open question. Specifically, planning motions that take human comfort into account is not a part of the human-robot handover process in most prior works. In this paper, we propose to generate smooth motions via an efficient model-predictive control (MPC) framework that integrates perception and complex domain-specific constraints into the optimization problem. We introduce a learning-based grasp reachability model to select candidate grasps which maximize the robot's manipulability, giving it more freedom to satisfy these constraints. Finally, we integrate a neural net force/torque classifier that detects contact events from noisy data. We conducted human-to-robot handover experiments on a diverse set of objects with several users (N=4) and performed a systematic evaluation of each module. The study shows that the users preferred our MPC approach over the baseline system by a large margin. More results and videos are available at https://sites.google.com/nvidia.com/mpc-for-handover.
DefGraspSim: Physics-based simulation of grasp outcomes for 3D deformable objects
Mar 21, 2022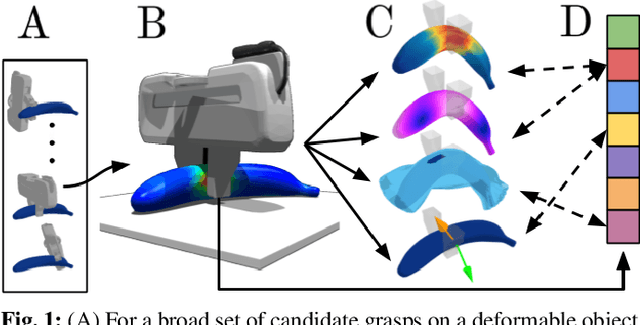
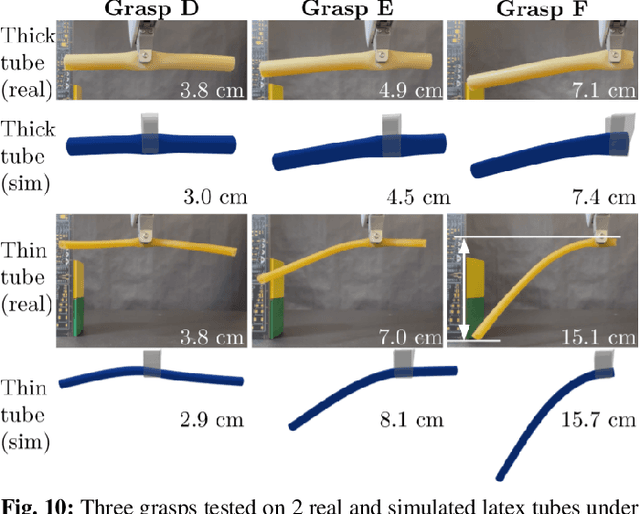
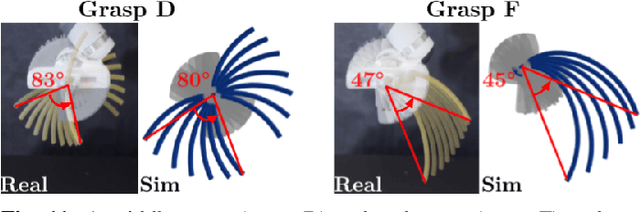

Robotic grasping of 3D deformable objects (e.g., fruits/vegetables, internal organs, bottles/boxes) is critical for real-world applications such as food processing, robotic surgery, and household automation. However, developing grasp strategies for such objects is uniquely challenging. Unlike rigid objects, deformable objects have infinite degrees of freedom and require field quantities (e.g., deformation, stress) to fully define their state. As these quantities are not easily accessible in the real world, we propose studying interaction with deformable objects through physics-based simulation. As such, we simulate grasps on a wide range of 3D deformable objects using a GPU-based implementation of the corotational finite element method (FEM). To facilitate future research, we open-source our simulated dataset (34 objects, 1e5 Pa elasticity range, 6800 grasp evaluations, 1.1M grasp measurements), as well as a code repository that allows researchers to run our full FEM-based grasp evaluation pipeline on arbitrary 3D object models of their choice. Finally, we demonstrate good correspondence between grasp outcomes on simulated objects and their real counterparts.
Learning Perceptual Concepts by Bootstrapping from Human Queries
Nov 09, 2021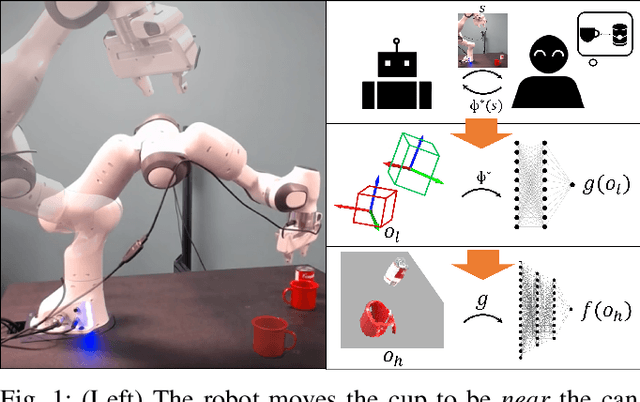
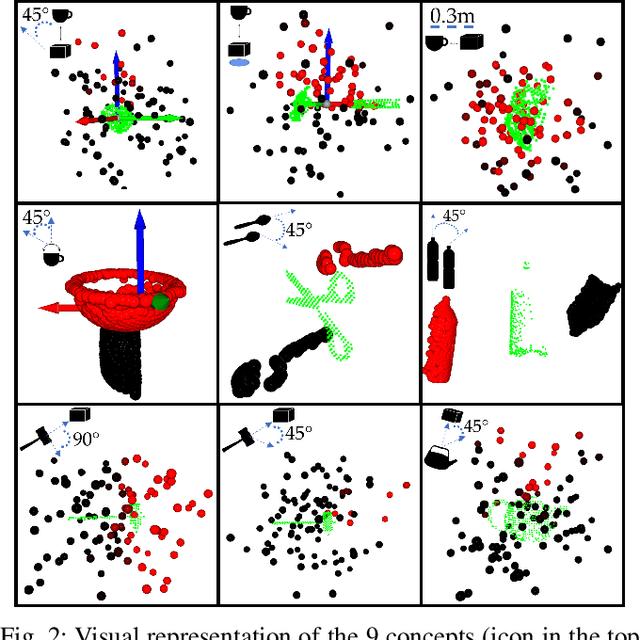
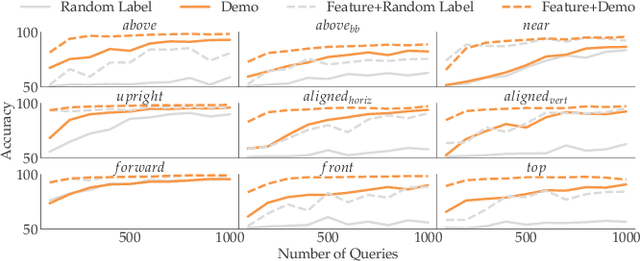
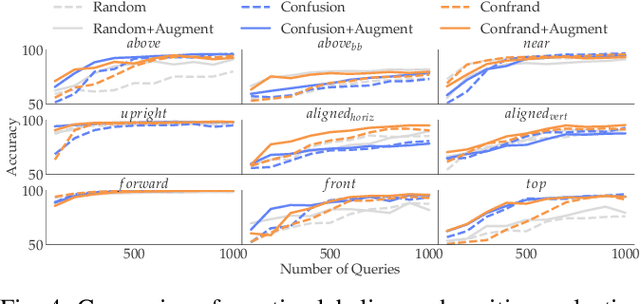
Robots need to be able to learn concepts from their users in order to adapt their capabilities to each user's unique task. But when the robot operates on high-dimensional inputs, like images or point clouds, this is impractical: the robot needs an unrealistic amount of human effort to learn the new concept. To address this challenge, we propose a new approach whereby the robot learns a low-dimensional variant of the concept and uses it to generate a larger data set for learning the concept in the high-dimensional space. This lets it take advantage of semantically meaningful privileged information only accessible at training time, like object poses and bounding boxes, that allows for richer human interaction to speed up learning. We evaluate our approach by learning prepositional concepts that describe object state or multi-object relationships, like above, near, or aligned, which are key to user specification of task goals and execution constraints for robots. Using a simulated human, we show that our approach improves sample complexity when compared to learning concepts directly in the high-dimensional space. We also demonstrate the utility of the learned concepts in motion planning tasks on a 7-DoF Franka Panda robot.
Geometric Fabrics: Generalizing Classical Mechanics to Capture the Physics of Behavior
Sep 21, 2021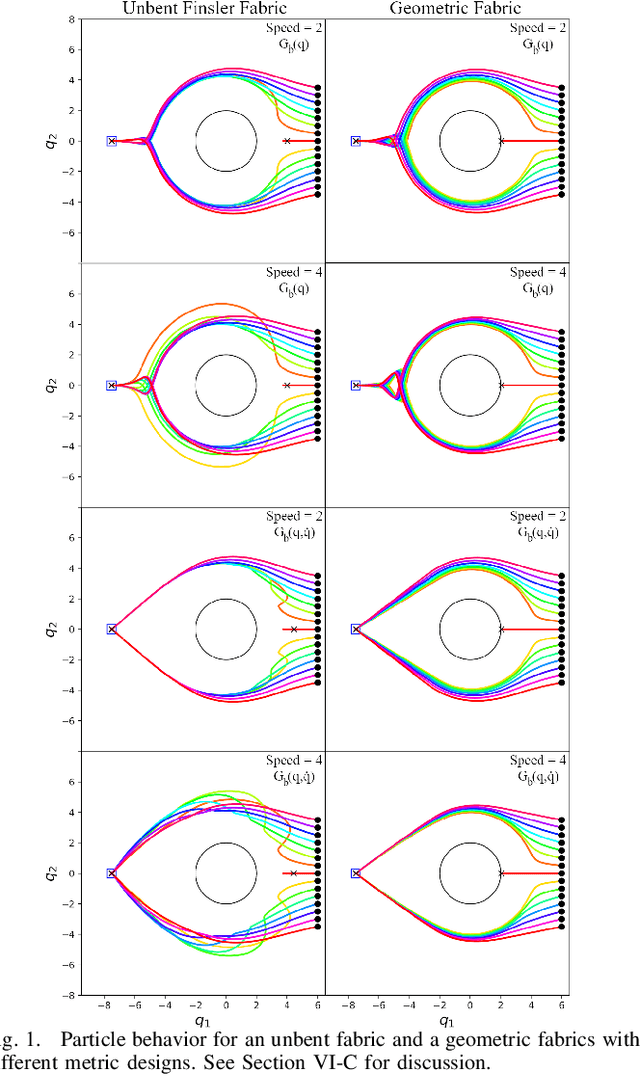
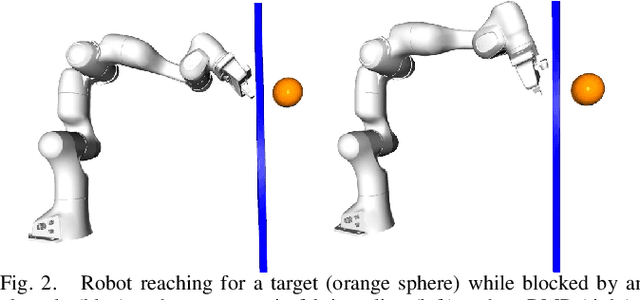
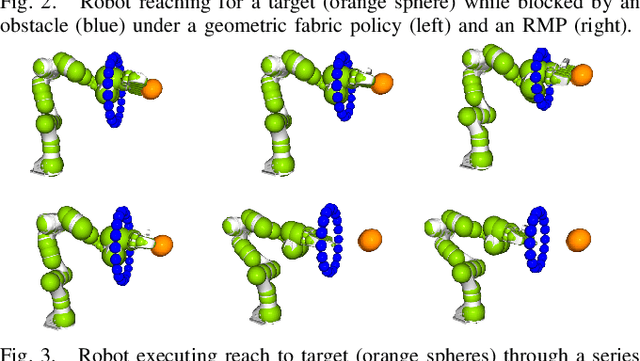
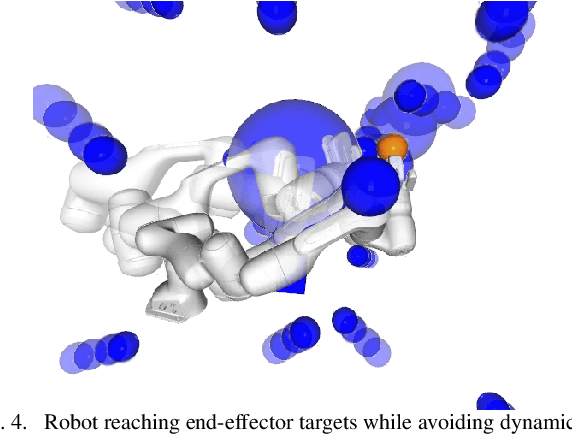
Classical mechanical systems are central to controller design in energy shaping methods of geometric control. However, their expressivity is limited by position-only metrics and the intimate link between metric and geometry. Recent work on Riemannian Motion Policies (RMPs) has shown that shedding these restrictions results in powerful design tools, but at the expense of theoretical guarantees. In this work, we generalize classical mechanics to what we call geometric fabrics, whose expressivity and theory enable the design of systems that outperform RMPs in practice. Geometric fabrics strictly generalize classical mechanics forming a new physics of behavior by first generalizing them to Finsler geometries and then explicitly bending them to shape their behavior. We develop the theory of fabrics and present both a collection of controlled experiments examining their theoretical properties and a set of robot system experiments showing improved performance over a well-engineered and hardened implementation of RMPs, our current state-of-the-art in controller design.
DefGraspSim: Simulation-based grasping of 3D deformable objects
Jul 12, 2021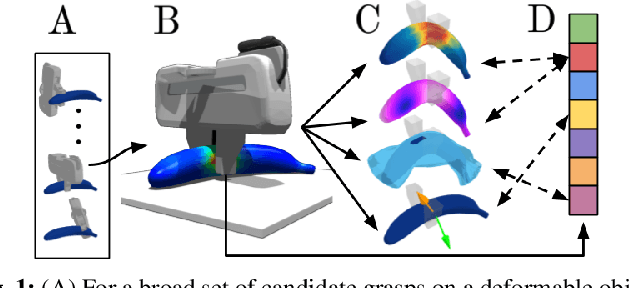
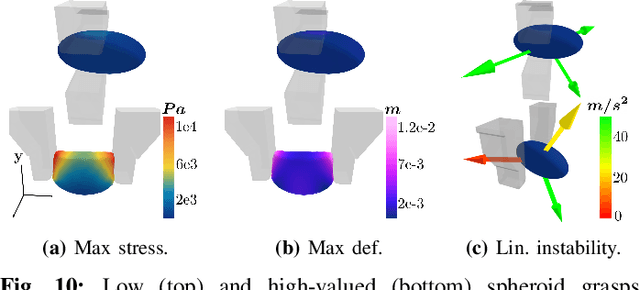
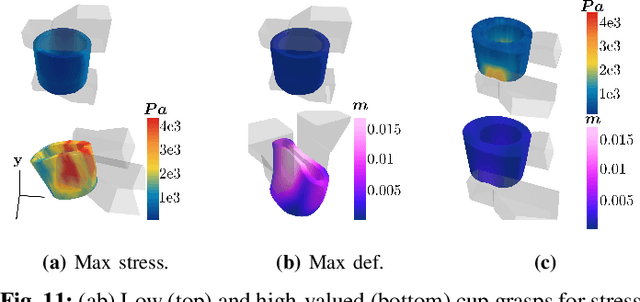
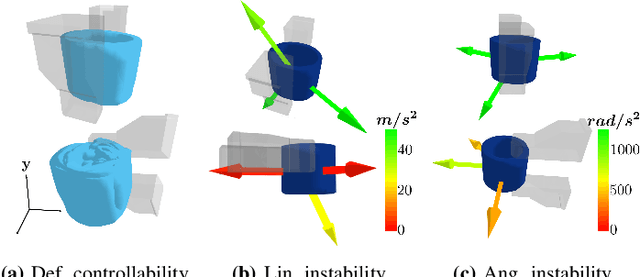
Robotic grasping of 3D deformable objects (e.g., fruits/vegetables, internal organs, bottles/boxes) is critical for real-world applications such as food processing, robotic surgery, and household automation. However, developing grasp strategies for such objects is uniquely challenging. In this work, we efficiently simulate grasps on a wide range of 3D deformable objects using a GPU-based implementation of the corotational finite element method (FEM). To facilitate future research, we open-source our simulated dataset (34 objects, 1e5 Pa elasticity range, 6800 grasp evaluations, 1.1M grasp measurements), as well as a code repository that allows researchers to run our full FEM-based grasp evaluation pipeline on arbitrary 3D object models of their choice. We also provide a detailed analysis on 6 object primitives. For each primitive, we methodically describe the effects of different grasp strategies, compute a set of performance metrics (e.g., deformation, stress) that fully capture the object response, and identify simple grasp features (e.g., gripper displacement, contact area) measurable by robots prior to pickup and predictive of these performance metrics. Finally, we demonstrate good correspondence between grasps on simulated objects and their real-world counterparts.
Fast Joint Space Model-Predictive Control for Reactive Manipulation
Apr 28, 2021
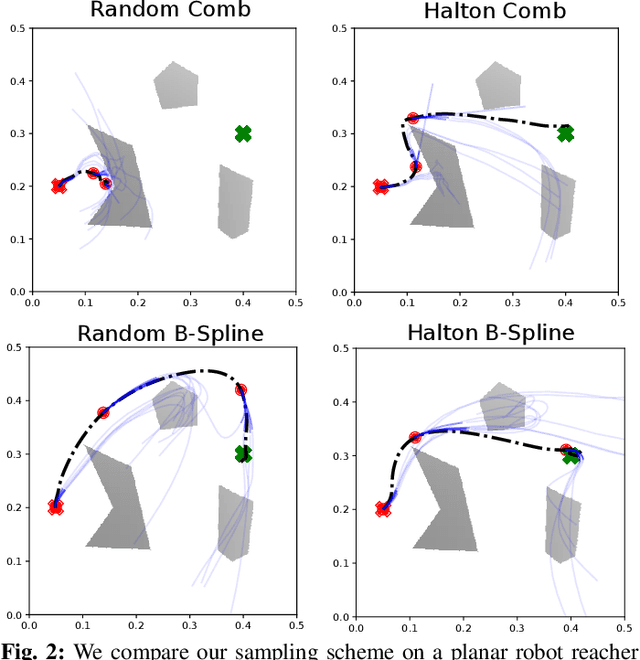
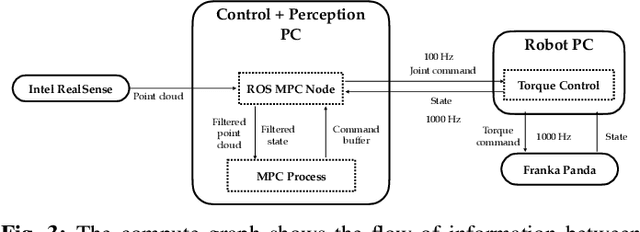
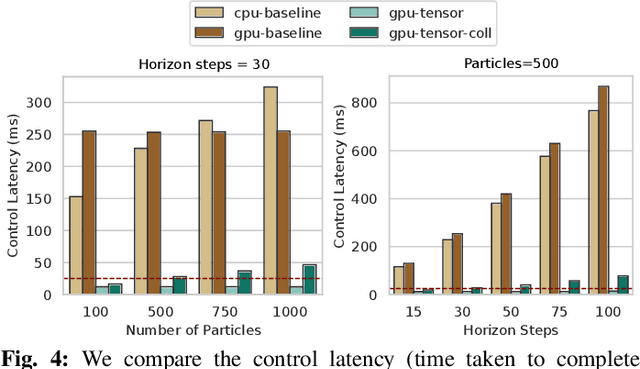
Sampling-based model predictive control (MPC) is a promising tool for feedback control of robots with complex and non-smooth dynamics and cost functions. The computationally demanding nature of sampling-based MPC algorithms is a key bottleneck in their application to high-dimensional robotic manipulation problems. Previous methods have addressed this issue by running MPC in the task space while relying on a low-level operational space controller for joint control. However, by not using the joint space of the robot in the MPC formulation, existing methods cannot directly account for non-task space related constraints such as avoiding joint limits, singular configurations, and link collisions. In this paper, we develop a joint space sampling-based MPC for manipulators that can be efficiently parallelized using GPUs. Our approach can handle task and joint space constraints while taking less than 0.02 seconds (50Hz) to compute the next control command. Further, our method can integrate perception into the control problem by utilizing learned cost functions from raw sensor data. We validate our approach by deploying it on a Franka Panda robot for a variety of common manipulation tasks. We study the effect of different cost formulations and MPC parameters on the synthesized behavior and provide key insights that pave the way for the application of sampling-based MPC for manipulators in a principled manner. Videos of experiments can be found at: https://sites.google.com/view/manipulation-mppi.
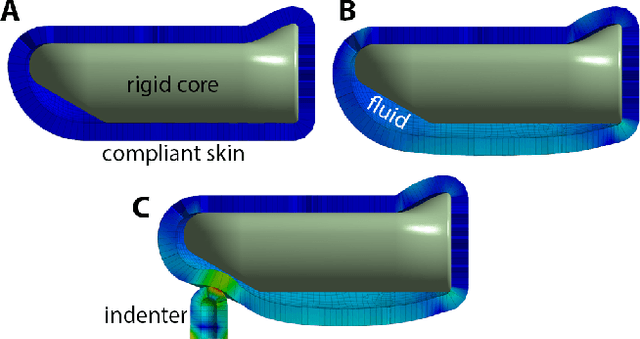
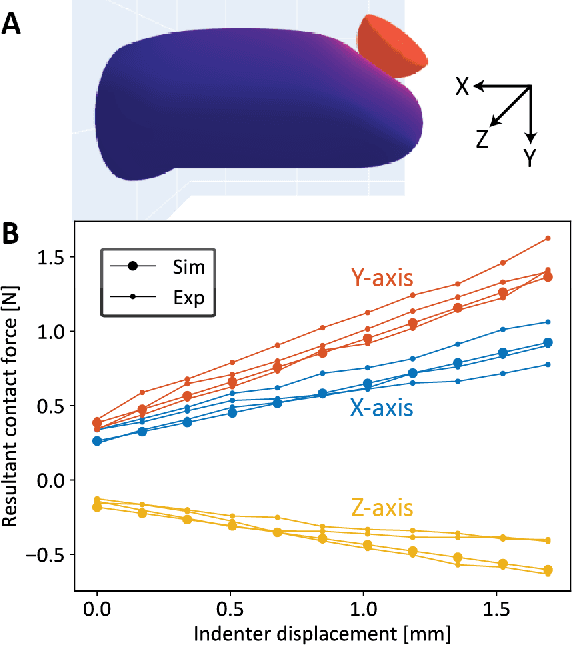
Sim-to-Real for Robotic Tactile Sensing via Physics-Based Simulation and Learned Latent Projections
Mar 31, 2021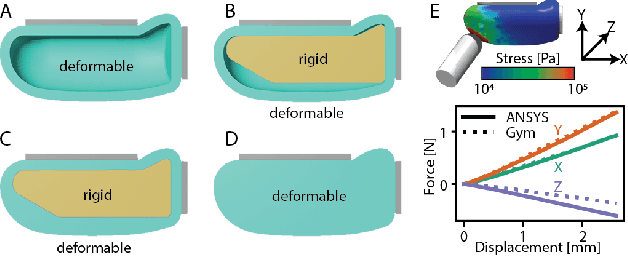
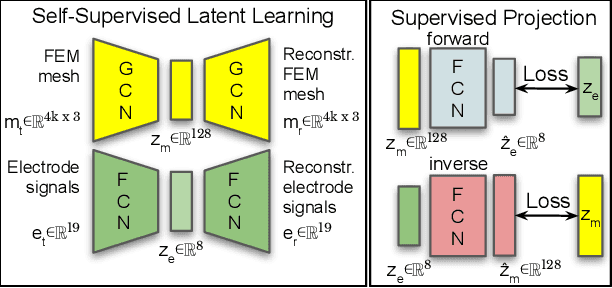
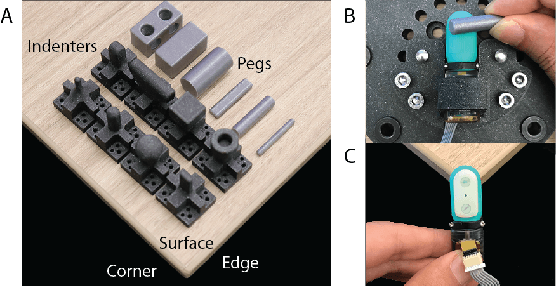
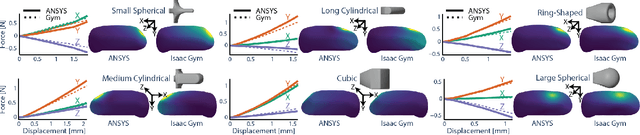
Tactile sensing is critical for robotic grasping and manipulation of objects under visual occlusion. However, in contrast to simulations of robot arms and cameras, current simulations of tactile sensors have limited accuracy, speed, and utility. In this work, we develop an efficient 3D finite element method (FEM) model of the SynTouch BioTac sensor using an open-access, GPU-based robotics simulator. Our simulations closely reproduce results from an experimentally-validated model in an industry-standard, CPU-based simulator, but at 75x the speed. We then learn latent representations for simulated BioTac deformations and real-world electrical output through self-supervision, as well as projections between the latent spaces using a small supervised dataset. Using these learned latent projections, we accurately synthesize real-world BioTac electrical output and estimate contact patches, both for unseen contact interactions. This work contributes an efficient, freely-accessible FEM model of the BioTac and comprises one of the first efforts to combine self-supervision, cross-modal transfer, and sim-to-real transfer for tactile sensors.
Interpreting and Predicting Tactile Signals for the SynTouch BioTac
Jan 14, 2021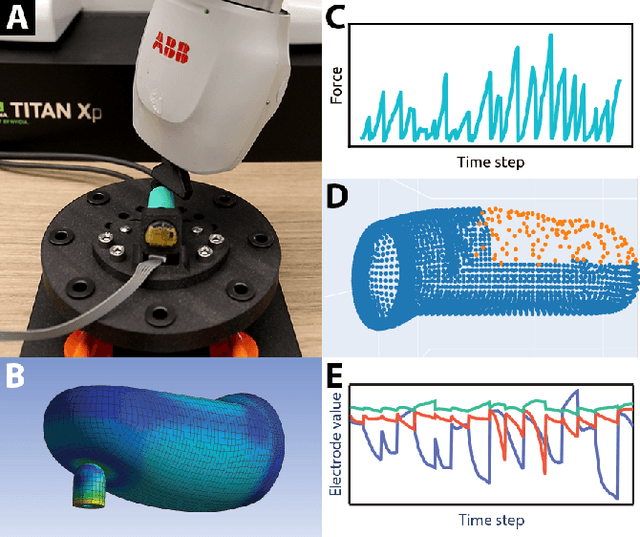
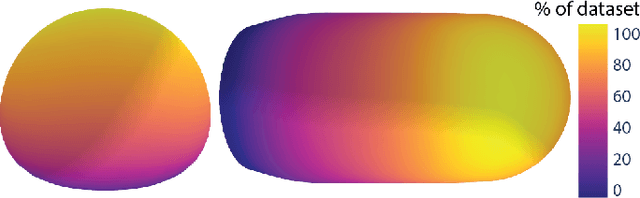
In the human hand, high-density contact information provided by afferent neurons is essential for many human grasping and manipulation capabilities. In contrast, robotic tactile sensors, including the state-of-the-art SynTouch BioTac, are typically used to provide low-density contact information, such as contact location, center of pressure, and net force. Although useful, these data do not convey or leverage the rich information content that some tactile sensors naturally measure. This research extends robotic tactile sensing beyond reduced-order models through 1) the automated creation of a precise experimental tactile dataset for the BioTac over a diverse range of physical interactions, 2) a 3D finite element (FE) model of the BioTac, which complements the experimental dataset with high-density, distributed contact data, 3) neural-network-based mappings from raw BioTac signals to not only low-dimensional experimental data, but also high-density FE deformation fields, and 4) mappings from the FE deformation fields to the raw signals themselves. The high-density data streams can provide a far greater quantity of interpretable information for grasping and manipulation algorithms than previously accessible.