 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
Counterfactuals for Design: A Model-Agnostic Method For Design Recommendations
May 18, 2023
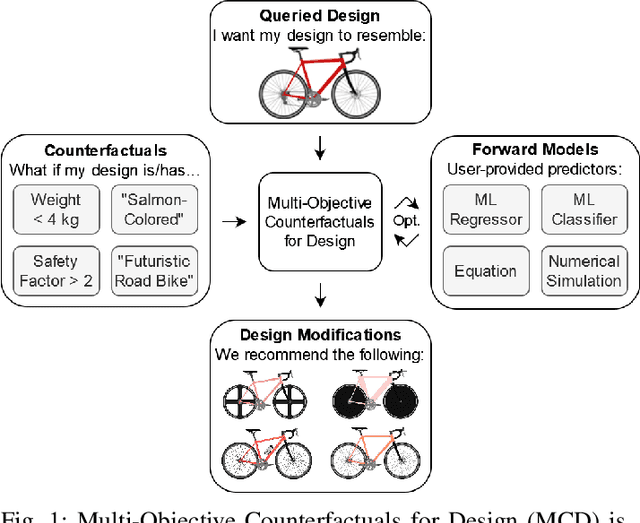
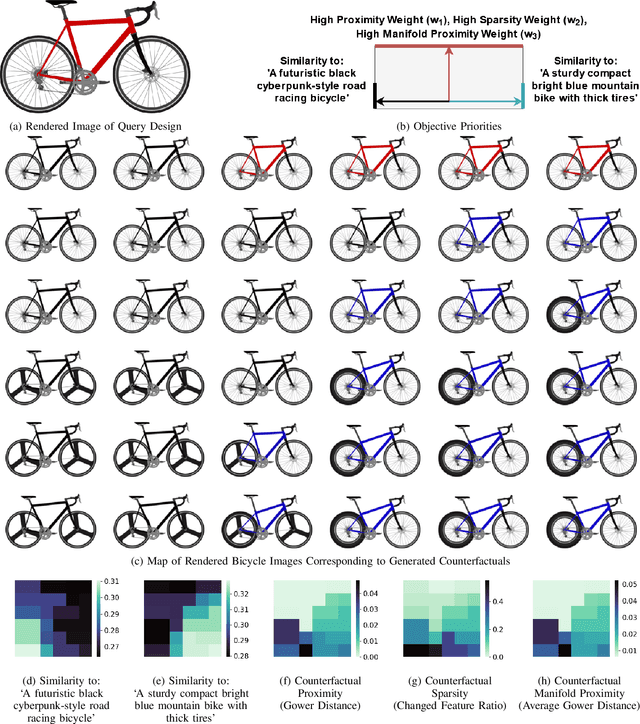
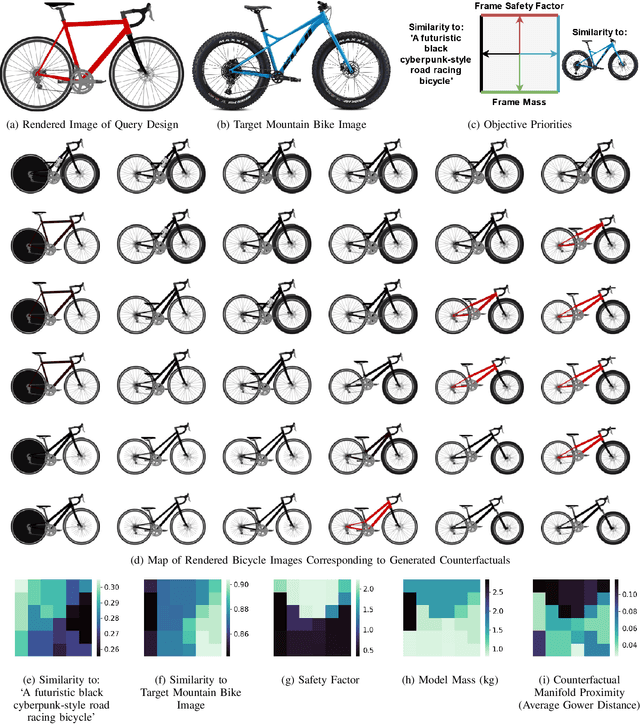
We introduce Multi-Objective Counterfactuals for Design (MCD), a novel method for counterfactual optimization in design problems. Counterfactuals are hypothetical situations that can lead to a different decision or choice. In this paper, the authors frame the counterfactual search problem as a design recommendation tool that can help identify modifications to a design, leading to better functional performance. MCD improves upon existing counterfactual search methods by supporting multi-objective queries, which are crucial in design problems, and by decoupling the counterfactual search and sampling processes, thus enhancing efficiency and facilitating objective tradeoff visualization. The paper demonstrates MCD's core functionality using a two-dimensional test case, followed by three case studies of bicycle design that showcase MCD's effectiveness in real-world design problems. In the first case study, MCD excels at recommending modifications to query designs that can significantly enhance functional performance, such as weight savings and improvements to the structural safety factor. The second case study demonstrates that MCD can work with a pre-trained language model to suggest design changes based on a subjective text prompt effectively. Lastly, the authors task MCD with increasing a query design's similarity to a target image and text prompt while simultaneously reducing weight and improving structural performance, demonstrating MCD's performance on a complex multimodal query. Overall, MCD has the potential to provide valuable recommendations for practitioners and design automation researchers looking for answers to their ``What if'' questions by exploring hypothetical design modifications and their impact on multiple design objectives. The code, test problems, and datasets used in the paper are available to the public at decode.mit.edu/projects/counterfactuals/.
OrthoGAN:High-Precision Image Generation for Teeth Orthodontic Visualization
Dec 29, 2022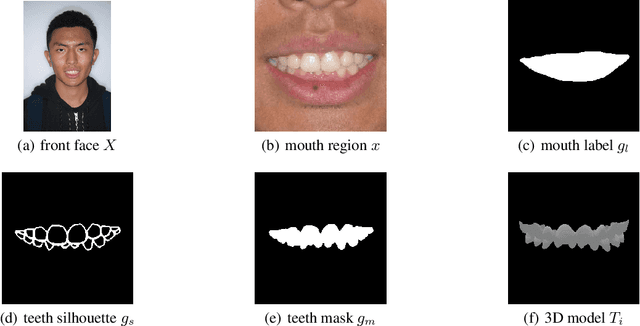
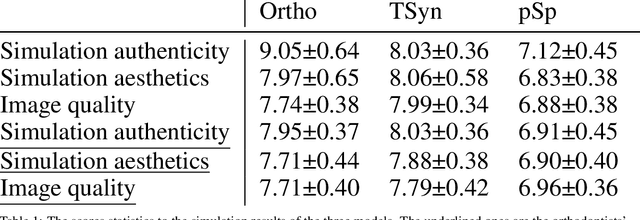
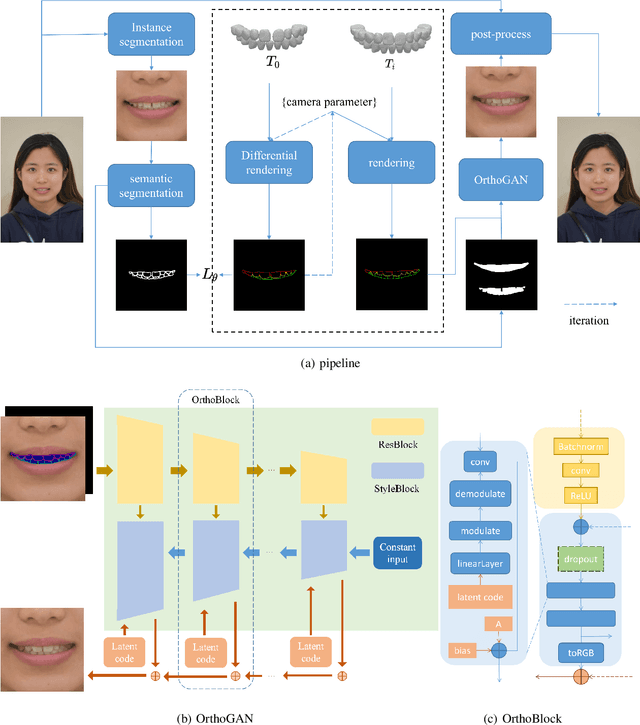

Patients take care of what their teeth will be like after the orthodontics. Orthodontists usually describe the expectation movement based on the original smile images, which is unconvincing. The growth of deep-learning generative models change this situation. It can visualize the outcome of orthodontic treatment and help patients foresee their future teeth and facial appearance. While previous studies mainly focus on 2D or 3D virtual treatment outcome (VTO) at a profile level, the problem of simulating treatment outcome at a frontal facial image is poorly explored. In this paper, we build an efficient and accurate system for simulating virtual teeth alignment effects in a frontal facial image. Our system takes a frontal face image of a patient with visible malpositioned teeth and the patient's 3D scanned teeth model as input, and progressively generates the visual results of the patient's teeth given the specific orthodontics planning steps from the doctor (i.e., the specification of translations and rotations of individual tooth). We design a multi-modal encoder-decoder based generative model to synthesize identity-preserving frontal facial images with aligned teeth. In addition, the original image color information is used to optimize the orthodontic outcomes, making the results more natural. We conduct extensive qualitative and clinical experiments and also a pilot study to validate our method.
Long-term Visual Localization with Mobile Sensors
Apr 16, 2023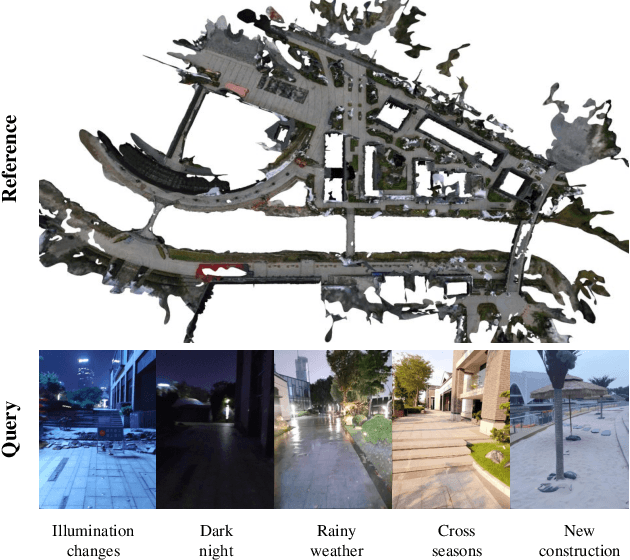
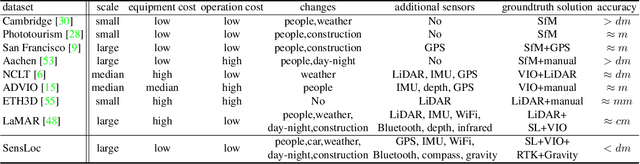
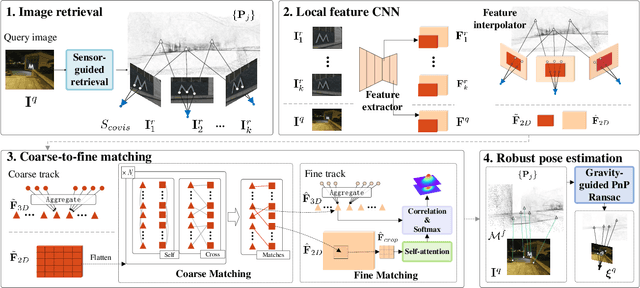
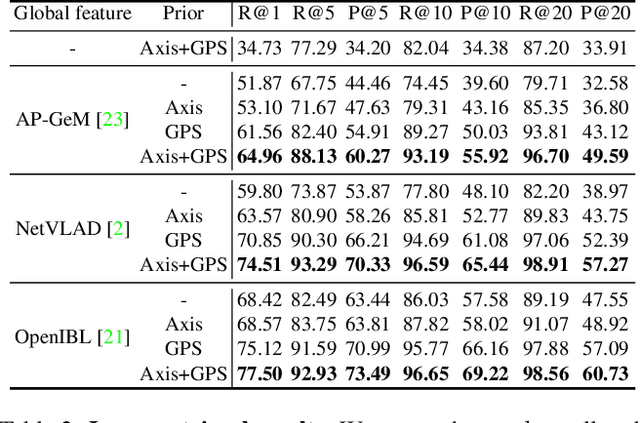
Despite the remarkable advances in image matching and pose estimation, image-based localization of a camera in a temporally-varying outdoor environment is still a challenging problem due to huge appearance disparity between query and reference images caused by illumination, seasonal and structural changes. In this work, we propose to leverage additional sensors on a mobile phone, mainly GPS, compass, and gravity sensor, to solve this challenging problem. We show that these mobile sensors provide decent initial poses and effective constraints to reduce the searching space in image matching and final pose estimation. With the initial pose, we are also able to devise a direct 2D-3D matching network to efficiently establish 2D-3D correspondences instead of tedious 2D-2D matching in existing systems. As no public dataset exists for the studied problem, we collect a new dataset that provides a variety of mobile sensor data and significant scene appearance variations, and develop a system to acquire ground-truth poses for query images. We benchmark our method as well as several state-of-the-art baselines and demonstrate the effectiveness of the proposed approach. The code and dataset will be released publicly.
Systematic Review on Learning-based Spectral CT
Apr 15, 2023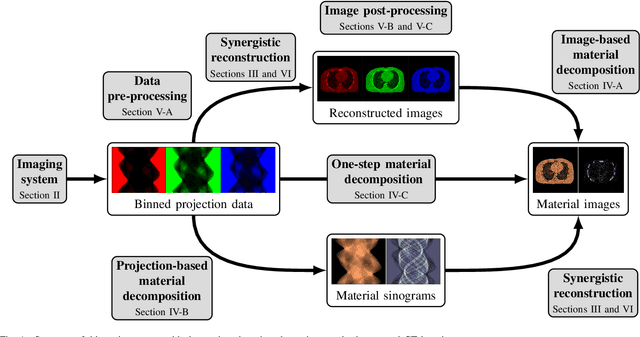
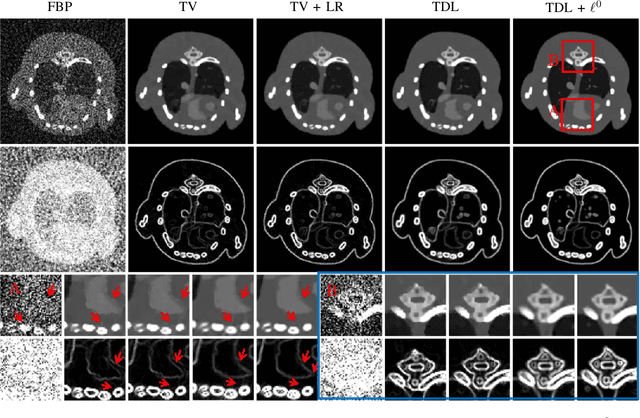
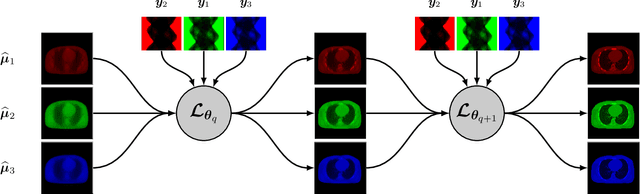
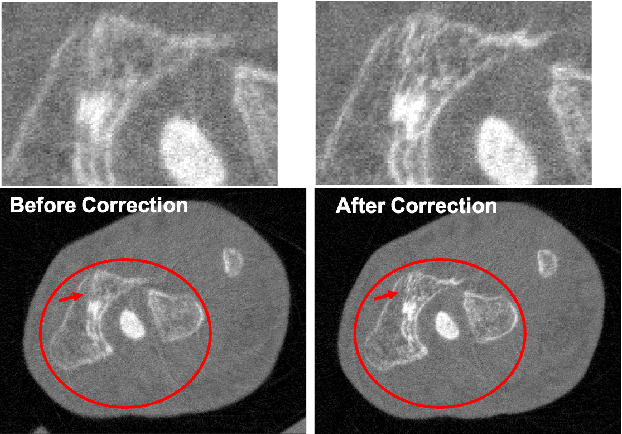
Spectral computed tomography (CT) has recently emerged as an advanced version of medical CT and significantly improves conventional (single-energy) CT. Spectral CT has two main forms: dual-energy computed tomography (DECT) and photon-counting computed tomography (PCCT), which offer image improvement, material decomposition, and feature quantification relative to conventional CT. However, the inherent challenges of spectral CT, evidenced by data and image artifacts, remain a bottleneck for clinical applications. To address these problems, machine learning techniques have been widely applied to spectral CT. In this review, we present the state-of-the-art data-driven techniques for spectral CT.
A Comprehensive Survey on Segment Anything Model for Vision and Beyond
May 19, 2023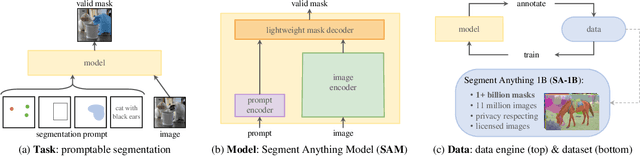
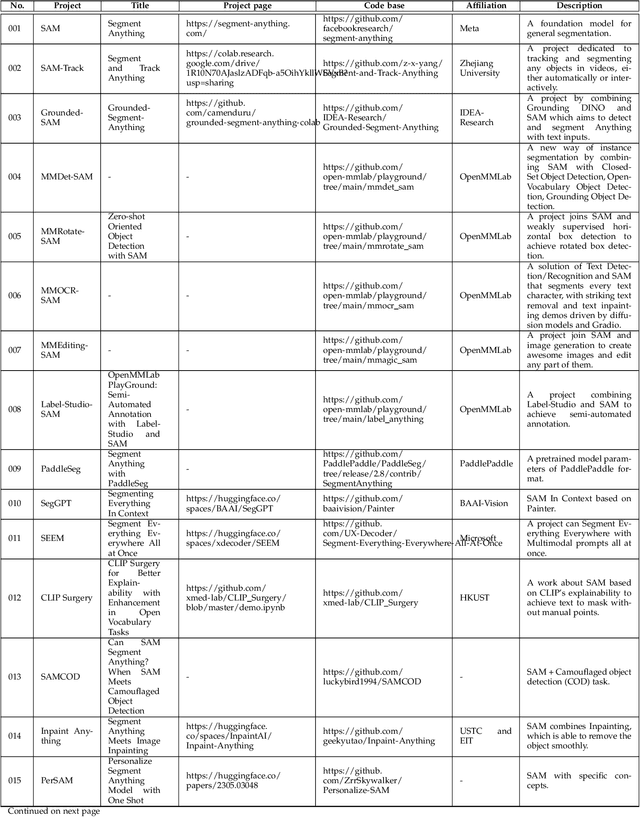

Artificial intelligence (AI) is evolving towards artificial general intelligence, which refers to the ability of an AI system to perform a wide range of tasks and exhibit a level of intelligence similar to that of a human being. This is in contrast to narrow or specialized AI, which is designed to perform specific tasks with a high degree of efficiency. Therefore, it is urgent to design a general class of models, which we term foundation models, trained on broad data that can be adapted to various downstream tasks. The recently proposed segment anything model (SAM) has made significant progress in breaking the boundaries of segmentation, greatly promoting the development of foundation models for computer vision. To fully comprehend SAM, we conduct a survey study. As the first to comprehensively review the progress of segmenting anything task for vision and beyond based on the foundation model of SAM, this work focuses on its applications to various tasks and data types by discussing its historical development, recent progress, and profound impact on broad applications. We first introduce the background and terminology for foundation models including SAM, as well as state-of-the-art methods contemporaneous with SAM that are significant for segmenting anything task. Then, we analyze and summarize the advantages and limitations of SAM across various image processing applications, including software scenes, real-world scenes, and complex scenes. Importantly, many insights are drawn to guide future research to develop more versatile foundation models and improve the architecture of SAM. We also summarize massive other amazing applications of SAM in vision and beyond. Finally, we maintain a continuously updated paper list and an open-source project summary for foundation model SAM at \href{https://github.com/liliu-avril/Awesome-Segment-Anything}{\color{magenta}{here}}.
Surgical-VQLA: Transformer with Gated Vision-Language Embedding for Visual Question Localized-Answering in Robotic Surgery
May 19, 2023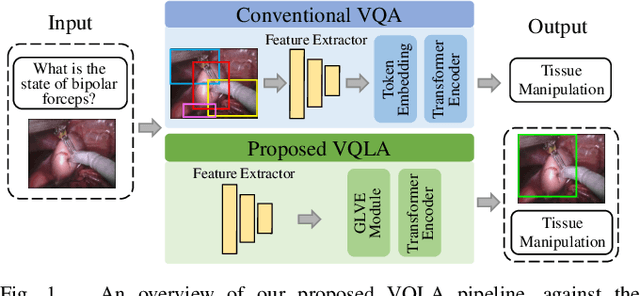
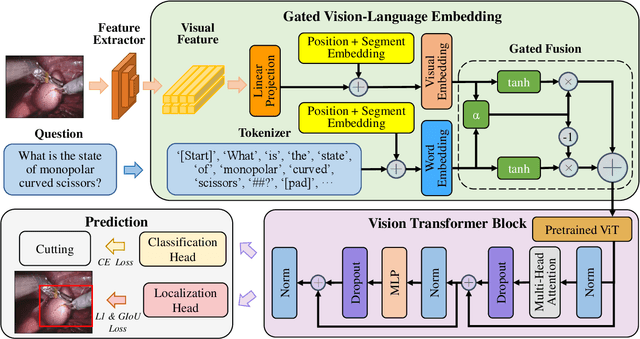
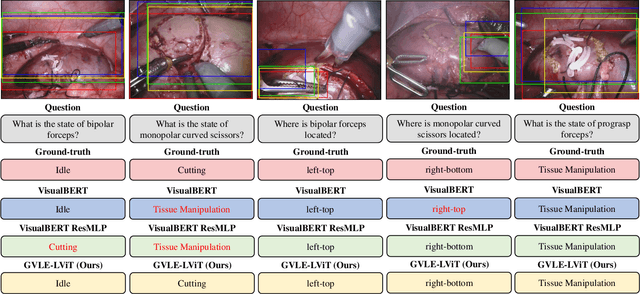
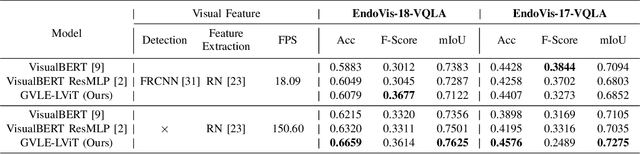
Despite the availability of computer-aided simulators and recorded videos of surgical procedures, junior residents still heavily rely on experts to answer their queries. However, expert surgeons are often overloaded with clinical and academic workloads and limit their time in answering. For this purpose, we develop a surgical question-answering system to facilitate robot-assisted surgical scene and activity understanding from recorded videos. Most of the existing VQA methods require an object detector and regions based feature extractor to extract visual features and fuse them with the embedded text of the question for answer generation. However, (1) surgical object detection model is scarce due to smaller datasets and lack of bounding box annotation; (2) current fusion strategy of heterogeneous modalities like text and image is naive; (3) the localized answering is missing, which is crucial in complex surgical scenarios. In this paper, we propose Visual Question Localized-Answering in Robotic Surgery (Surgical-VQLA) to localize the specific surgical area during the answer prediction. To deal with the fusion of the heterogeneous modalities, we design gated vision-language embedding (GVLE) to build input patches for the Language Vision Transformer (LViT) to predict the answer. To get localization, we add the detection head in parallel with the prediction head of the LViT. We also integrate GIoU loss to boost localization performance by preserving the accuracy of the question-answering model. We annotate two datasets of VQLA by utilizing publicly available surgical videos from MICCAI challenges EndoVis-17 and 18. Our validation results suggest that Surgical-VQLA can better understand the surgical scene and localize the specific area related to the question-answering. GVLE presents an efficient language-vision embedding technique by showing superior performance over the existing benchmarks.
AutoCoreset: An Automatic Practical Coreset Construction Framework
May 19, 2023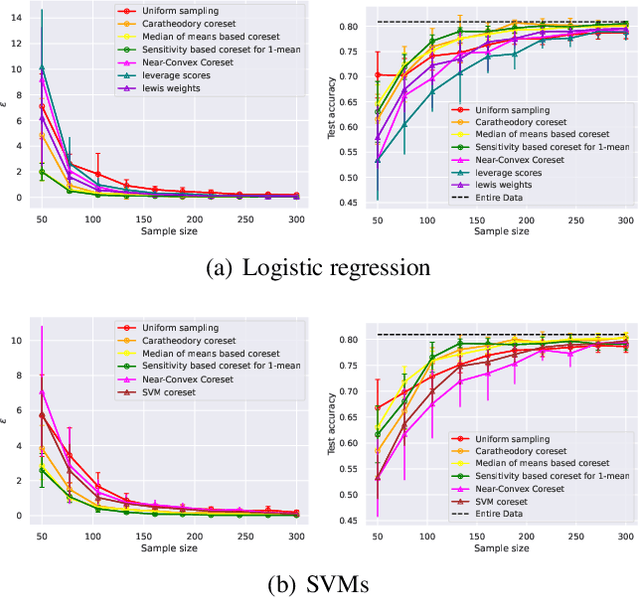
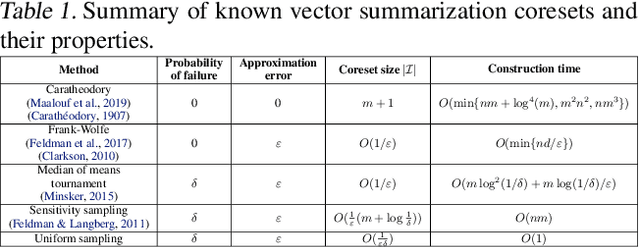
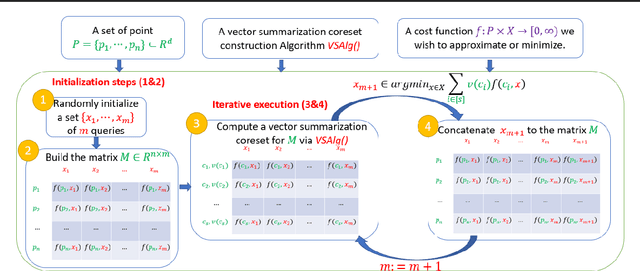
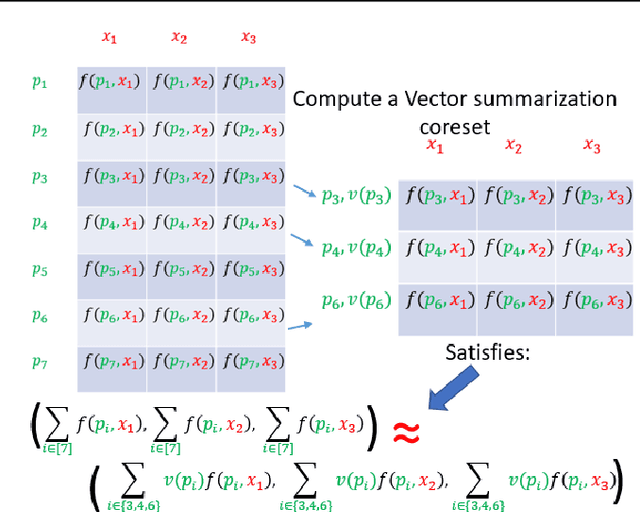
A coreset is a tiny weighted subset of an input set, that closely resembles the loss function, with respect to a certain set of queries. Coresets became prevalent in machine learning as they have shown to be advantageous for many applications. While coreset research is an active research area, unfortunately, coresets are constructed in a problem-dependent manner, where for each problem, a new coreset construction algorithm is usually suggested, a process that may take time or may be hard for new researchers in the field. Even the generic frameworks require additional (problem-dependent) computations or proofs to be done by the user. Besides, many problems do not have (provable) small coresets, limiting their applicability. To this end, we suggest an automatic practical framework for constructing coresets, which requires (only) the input data and the desired cost function from the user, without the need for any other task-related computation to be done by the user. To do so, we reduce the problem of approximating a loss function to an instance of vector summation approximation, where the vectors we aim to sum are loss vectors of a specific subset of the queries, such that we aim to approximate the image of the function on this subset. We show that while this set is limited, the coreset is quite general. An extensive experimental study on various machine learning applications is also conducted. Finally, we provide a ``plug and play" style implementation, proposing a user-friendly system that can be easily used to apply coresets for many problems. Full open source code can be found at \href{https://github.com/alaamaalouf/AutoCoreset}{\text{https://github.com/alaamaalouf/AutoCoreset}}. We believe that these contributions enable future research and easier use and applications of coresets.
Transformer-based model for monocular visual odometry: a video understanding approach
May 10, 2023
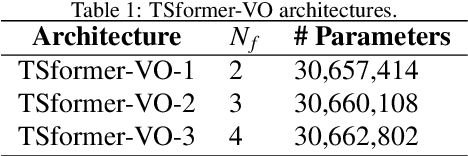
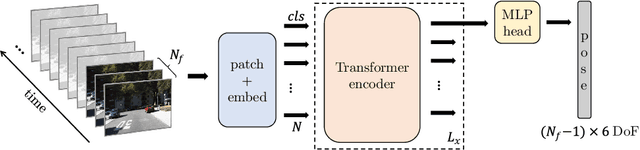
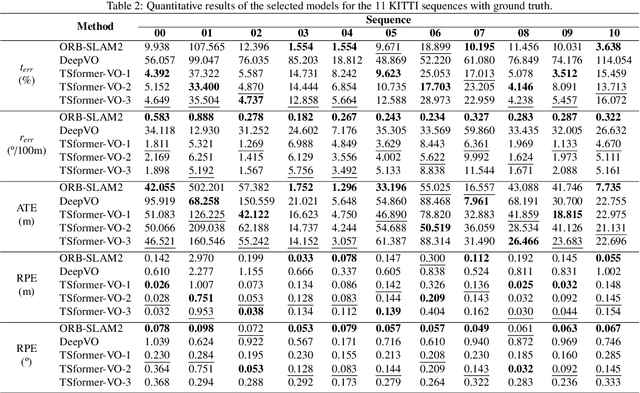
Estimating the camera pose given images of a single camera is a traditional task in mobile robots and autonomous vehicles. This problem is called monocular visual odometry and it often relies on geometric approaches that require engineering effort for a specific scenario. Deep learning methods have shown to be generalizable after proper training and a considerable amount of available data. Transformer-based architectures have dominated the state-of-the-art in natural language processing and computer vision tasks, such as image and video understanding. In this work, we deal with the monocular visual odometry as a video understanding task to estimate the 6-DoF camera's pose. We contribute by presenting the TSformer-VO model based on spatio-temporal self-attention mechanisms to extract features from clips and estimate the motions in an end-to-end manner. Our approach achieved competitive state-of-the-art performance compared with geometry-based and deep learning-based methods on the KITTI visual odometry dataset, outperforming the DeepVO implementation highly accepted in the visual odometry community.
DynaMITe: Dynamic Query Bootstrapping for Multi-object Interactive Segmentation Transformer
Apr 13, 2023
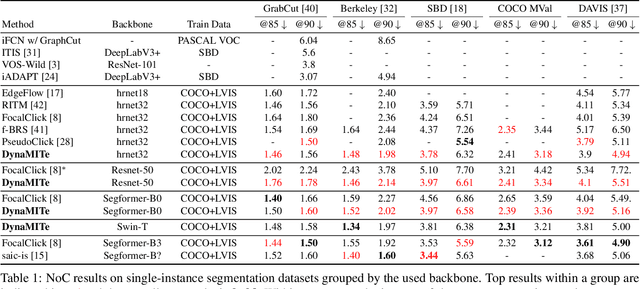
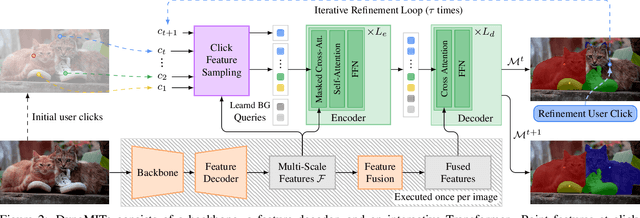
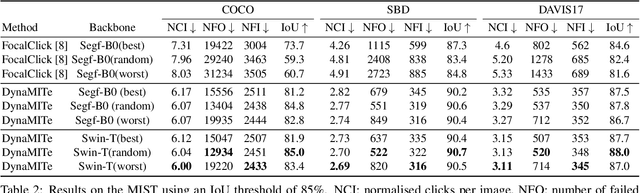
Most state-of-the-art instance segmentation methods rely on large amounts of pixel-precise ground-truth annotations for training, which are expensive to create. Interactive segmentation networks help generate such annotations based on an image and the corresponding user interactions such as clicks. Existing methods for this task can only process a single instance at a time and each user interaction requires a full forward pass through the entire deep network. We introduce a more efficient approach, called DynaMITe, in which we represent user interactions as spatio-temporal queries to a Transformer decoder with a potential to segment multiple object instances in a single iteration. Our architecture also alleviates any need to re-compute image features during refinement, and requires fewer interactions for segmenting multiple instances in a single image when compared to other methods. DynaMITe achieves state-of-the-art results on multiple existing interactive segmentation benchmarks, and also on the new multi-instance benchmark that we propose in this paper.
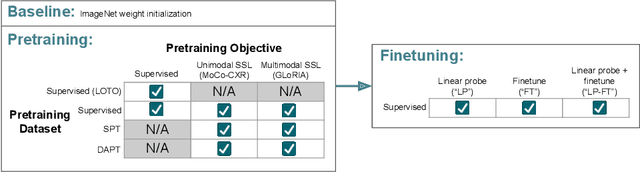
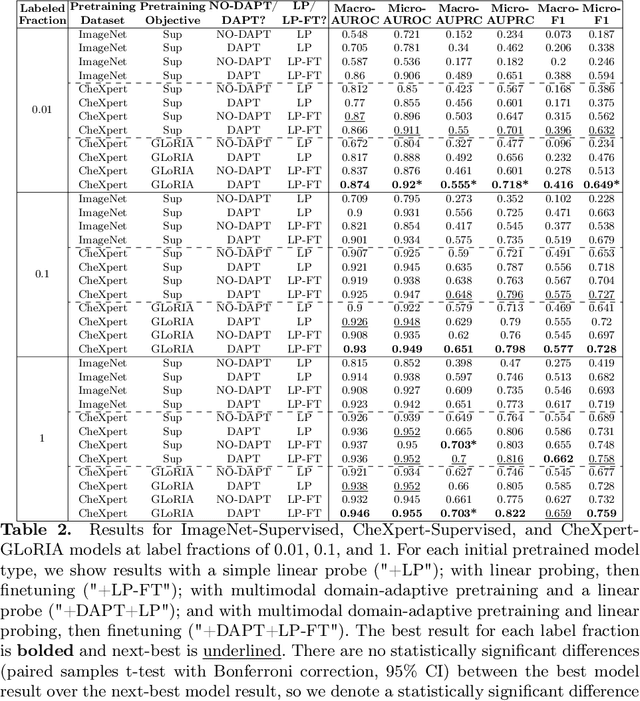
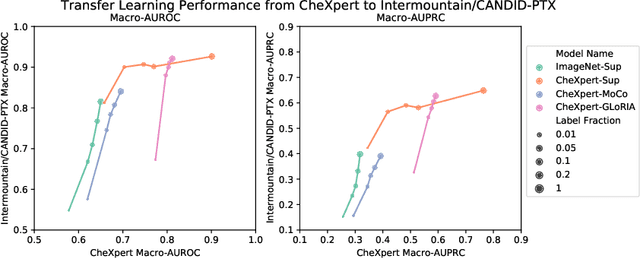
How to Train Your CheXDragon: Training Chest X-Ray Models for Transfer to Novel Tasks and Healthcare Systems
May 13, 2023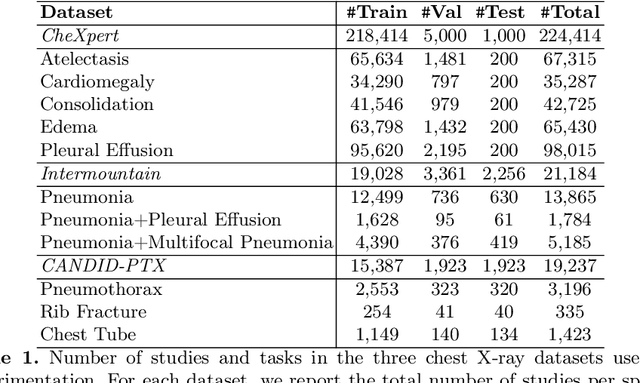
Self-supervised learning (SSL) enables label efficient training for machine learning models. This is essential for domains such as medical imaging, where labels are costly and time-consuming to curate. However, the most effective supervised or SSL strategy for transferring models to different healthcare systems or novel tasks is not well understood. In this work, we systematically experiment with a variety of supervised and self-supervised pretraining strategies using multimodal datasets of medical images (chest X-rays) and text (radiology reports). We then evaluate their performance on data from two external institutions with diverse sets of tasks. In addition, we experiment with different transfer learning strategies to effectively adapt these pretrained models to new tasks and healthcare systems. Our empirical results suggest that multimodal SSL gives substantial gains over unimodal SSL in performance across new healthcare systems and tasks, comparable to models pretrained with full supervision. We demonstrate additional performance gains with models further adapted to the new dataset and task, using multimodal domain-adaptive pretraining (DAPT), linear probing then finetuning (LP-FT), and both methods combined. We offer suggestions for alternative models to use in scenarios where not all of these additions are feasible. Our results provide guidance for improving the generalization of medical image interpretation models to new healthcare systems and novel tasks.