 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINSPATIO-WORLD: A Real-Time 4D World Simulator via Spatiotemporal Autoregressive Modeling
Apr 08, 2026Building world models with spatial consistency and real-time interactivity remains a fundamental challenge in computer vision. Current video generation paradigms often struggle with a lack of spatial persistence and insufficient visual realism, making it difficult to support seamless navigation in complex environments. To address these challenges, we propose INSPATIO-WORLD, a novel real-time framework capable of recovering and generating high-fidelity, dynamic interactive scenes from a single reference video. At the core of our approach is a Spatiotemporal Autoregressive (STAR) architecture, which enables consistent and controllable scene evolution through two tightly coupled components: Implicit Spatiotemporal Cache aggregates reference and historical observations into a latent world representation, ensuring global consistency during long-horizon navigation; Explicit Spatial Constraint Module enforces geometric structure and translates user interactions into precise and physically plausible camera trajectories. Furthermore, we introduce Joint Distribution Matching Distillation (JDMD). By using real-world data distributions as a regularizing guide, JDMD effectively overcomes the fidelity degradation typically caused by over-reliance on synthetic data. Extensive experiments demonstrate that INSPATIO-WORLD significantly outperforms existing state-of-the-art (SOTA) models in spatial consistency and interaction precision, ranking first among real-time interactive methods on the WorldScore-Dynamic benchmark, and establishing a practical pipeline for navigating 4D environments reconstructed from monocular videos.
SparseCam4D: Spatio-Temporally Consistent 4D Reconstruction from Sparse Cameras
Mar 27, 2026High-quality 4D reconstruction enables photorealistic and immersive rendering of the dynamic real world. However, unlike static scenes that can be fully captured with a single camera, high-quality dynamic scenes typically require dense arrays of tens or even hundreds of synchronized cameras. Dependence on such costly lab setups severely limits practical scalability. The reliance on such costly lab setups severely limits practical scalability. To this end, we propose a sparse-camera dynamic reconstruction framework that exploits abundant yet inconsistent generative observations. Our key innovation is the Spatio-Temporal Distortion Field, which provides a unified mechanism for modeling inconsistencies in generative observations across both spatial and temporal dimensions. Building on this, we develop a complete pipeline that enables 4D reconstruction from sparse and uncalibrated camera inputs. We evaluate our method on multi-camera dynamic scene benchmarks, achieving spatio-temporally consistent high-fidelity renderings and significantly outperforming existing approaches.
InSpatio-WorldFM: An Open-Source Real-Time Generative Frame Model
Mar 12, 2026We present InSpatio-WorldFM, an open-source real-time frame model for spatial intelligence. Unlike video-based world models that rely on sequential frame generation and incur substantial latency due to window-level processing, InSpatio-WorldFM adopts a frame-based paradigm that generates each frame independently, enabling low-latency real-time spatial inference. By enforcing multi-view spatial consistency through explicit 3D anchors and implicit spatial memory, the model preserves global scene geometry while maintaining fine-grained visual details across viewpoint changes. We further introduce a progressive three-stage training pipeline that transforms a pretrained image diffusion model into a controllable frame model and finally into a real-time generator through few-step distillation. Experimental results show that InSpatio-WorldFM achieves strong multi-view consistency while supporting interactive exploration on consumer-grade GPUs, providing an efficient alternative to traditional video-based world models for real-time world simulation.
HilbertA: Hilbert Attention for Image Generation with Diffusion Models
Sep 30, 2025



Designing sparse attention for diffusion transformers requires reconciling two-dimensional spatial locality with GPU efficiency, a trade-off that current methods struggle to achieve. Existing approaches enforce two-dimensional spatial locality but often incur uncoalesced memory access. We present HilbertA, a 2D-aware and GPU-efficient sparse attention mechanism. HilbertA reorders image tokens along Hilbert curves to achieve a contiguous memory layout while preserving spatial neighborhoods, and employs a sliding schedule across layers to enable long-range information propagation without repeated or uncoalesced memory access. To further enhance cross-tile communication and positional awareness, HilbertA introduces a small central shared region. Implemented in Triton, HilbertA delivers comparable image quality with significant acceleration over prior methods on Flux.1-dev, demonstrating the feasibility of hardware-aligned two-dimensional sparse attention for high-resolution image generation. HilbertA delivers attention speedups of $2.3\times$ when generating $1024\times 1024$ images, and up to $4.17\times$ at $2048\times 2048$, while achieving image quality comparable to or surpassing baselines.
StarGen: A Spatiotemporal Autoregression Framework with Video Diffusion Model for Scalable and Controllable Scene Generation
Jan 10, 2025



Recent advances in large reconstruction and generative models have significantly improved scene reconstruction and novel view generation. However, due to compute limitations, each inference with these large models is confined to a small area, making long-range consistent scene generation challenging. To address this, we propose StarGen, a novel framework that employs a pre-trained video diffusion model in an autoregressive manner for long-range scene generation. The generation of each video clip is conditioned on the 3D warping of spatially adjacent images and the temporally overlapping image from previously generated clips, improving spatiotemporal consistency in long-range scene generation with precise pose control. The spatiotemporal condition is compatible with various input conditions, facilitating diverse tasks, including sparse view interpolation, perpetual view generation, and layout-conditioned city generation. Quantitative and qualitative evaluations demonstrate StarGen's superior scalability, fidelity, and pose accuracy compared to state-of-the-art methods.
PGSR: Planar-based Gaussian Splatting for Efficient and High-Fidelity Surface Reconstruction
Jun 10, 2024



Recently, 3D Gaussian Splatting (3DGS) has attracted widespread attention due to its high-quality rendering, and ultra-fast training and rendering speed. However, due to the unstructured and irregular nature of Gaussian point clouds, it is difficult to guarantee geometric reconstruction accuracy and multi-view consistency simply by relying on image reconstruction loss. Although many studies on surface reconstruction based on 3DGS have emerged recently, the quality of their meshes is generally unsatisfactory. To address this problem, we propose a fast planar-based Gaussian splatting reconstruction representation (PGSR) to achieve high-fidelity surface reconstruction while ensuring high-quality rendering. Specifically, we first introduce an unbiased depth rendering method, which directly renders the distance from the camera origin to the Gaussian plane and the corresponding normal map based on the Gaussian distribution of the point cloud, and divides the two to obtain the unbiased depth. We then introduce single-view geometric, multi-view photometric, and geometric regularization to preserve global geometric accuracy. We also propose a camera exposure compensation model to cope with scenes with large illumination variations. Experiments on indoor and outdoor scenes show that our method achieves fast training and rendering while maintaining high-fidelity rendering and geometric reconstruction, outperforming 3DGS-based and NeRF-based methods.
Long-term Visual Localization with Mobile Sensors
Apr 16, 2023



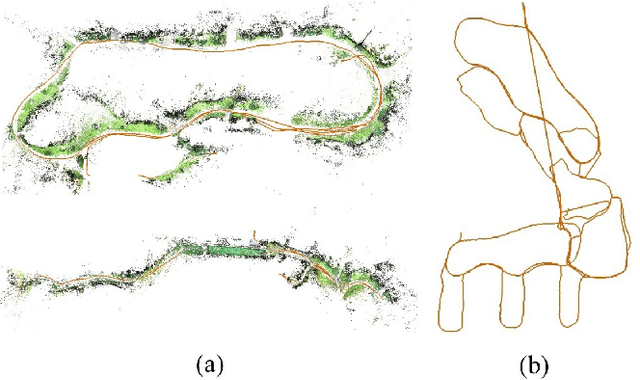
Despite the remarkable advances in image matching and pose estimation, image-based localization of a camera in a temporally-varying outdoor environment is still a challenging problem due to huge appearance disparity between query and reference images caused by illumination, seasonal and structural changes. In this work, we propose to leverage additional sensors on a mobile phone, mainly GPS, compass, and gravity sensor, to solve this challenging problem. We show that these mobile sensors provide decent initial poses and effective constraints to reduce the searching space in image matching and final pose estimation. With the initial pose, we are also able to devise a direct 2D-3D matching network to efficiently establish 2D-3D correspondences instead of tedious 2D-2D matching in existing systems. As no public dataset exists for the studied problem, we collect a new dataset that provides a variety of mobile sensor data and significant scene appearance variations, and develop a system to acquire ground-truth poses for query images. We benchmark our method as well as several state-of-the-art baselines and demonstrate the effectiveness of the proposed approach. The code and dataset will be released publicly.
EC-SfM: Efficient Covisibility-based Structure-from-Motion for Both Sequential and Unordered Images
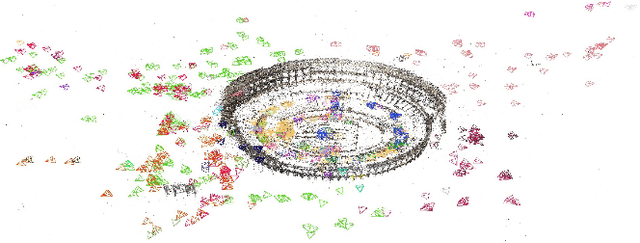
Feb 21, 2023



Structure-from-Motion is a technology used to obtain scene structure through image collection, which is a fundamental problem in computer vision. For unordered Internet images, SfM is very slow due to the lack of prior knowledge about image overlap. For sequential images, knowing the large overlap between adjacent frames, SfM can adopt a variety of acceleration strategies, which are only applicable to sequential data. To further improve the reconstruction efficiency and break the gap of strategies between these two kinds of data, this paper presents an efficient covisibility-based incremental SfM. Different from previous methods, we exploit covisibility and registration dependency to describe the image connection which is suitable to any kind of data. Based on this general image connection, we propose a unified framework to efficiently reconstruct sequential images, unordered images, and the mixture of these two. Experiments on the unordered images and mixed data verify the effectiveness of the proposed method, which is three times faster than the state of the art on feature matching, and an order of magnitude faster on reconstruction without sacrificing the accuracy. The source code is publicly available at https://github.com/openxrlab/xrsfm
Robust Keyframe-based Dense SLAM with an RGB-D Camera
Nov 14, 2017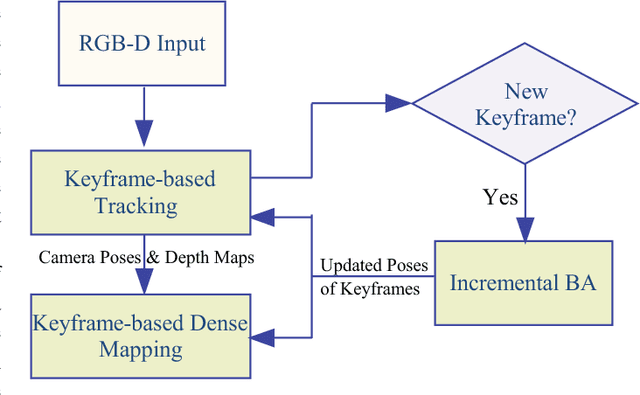
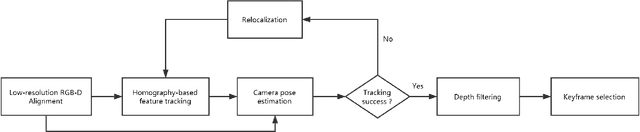
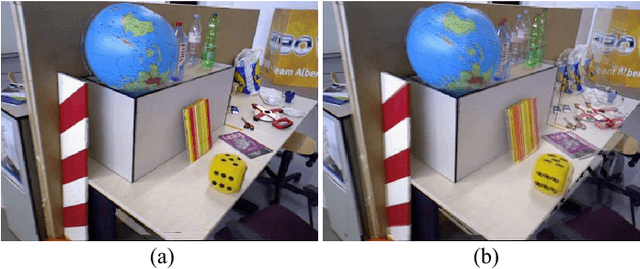
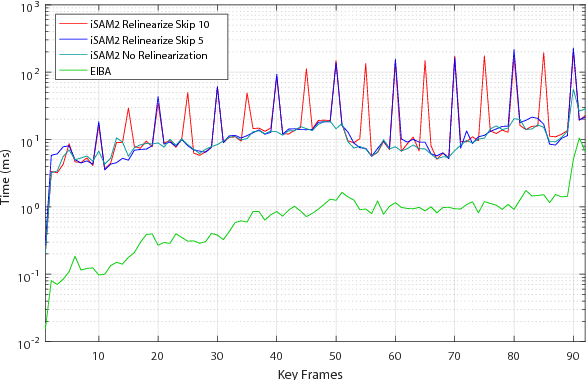
In this paper, we present RKD-SLAM, a robust keyframe-based dense SLAM approach for an RGB-D camera that can robustly handle fast motion and dense loop closure, and run without time limitation in a moderate size scene. It not only can be used to scan high-quality 3D models, but also can satisfy the demand of VR and AR applications. First, we combine color and depth information to construct a very fast keyframe-based tracking method on a CPU, which can work robustly in challenging cases (e.g.~fast camera motion and complex loops). For reducing accumulation error, we also introduce a very efficient incremental bundle adjustment (BA) algorithm, which can greatly save unnecessary computation and perform local and global BA in a unified optimization framework. An efficient keyframe-based depth representation and fusion method is proposed to generate and timely update the dense 3D surface with online correction according to the refined camera poses of keyframes through BA. The experimental results and comparisons on a variety of challenging datasets and TUM RGB-D benchmark demonstrate the effectiveness of the proposed system.
ENFT: Efficient Non-Consecutive Feature Tracking for Robust Structure-from-Motion
Oct 12, 2016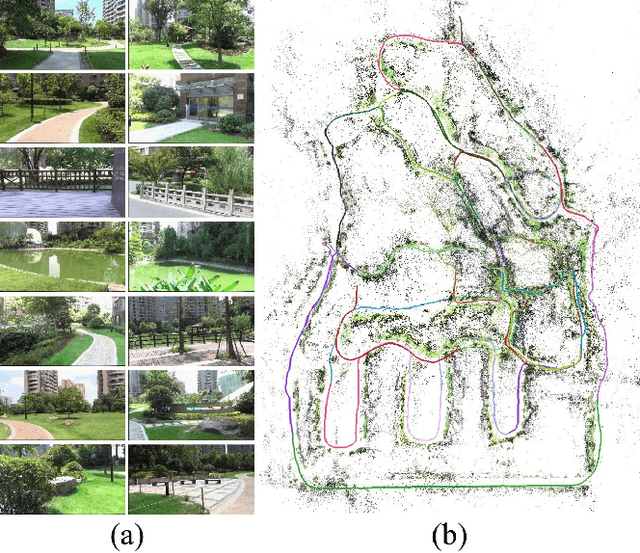
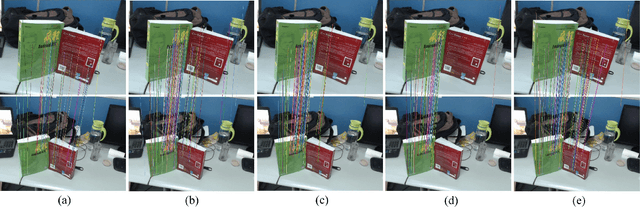
Structure-from-motion (SfM) largely relies on feature tracking. In image sequences, if disjointed tracks caused by objects moving in and out of the field of view, occasional occlusion, or image noise, are not handled well, corresponding SfM could be affected. This problem becomes severer for large-scale scenes, which typically requires to capture multiple sequences to cover the whole scene. In this paper, we propose an efficient non-consecutive feature tracking (ENFT) framework to match interrupted tracks distributed in different subsequences or even in different videos. Our framework consists of steps of solving the feature `dropout' problem when indistinctive structures, noise or large image distortion exists, and of rapidly recognizing and joining common features located in different subsequences. In addition, we contribute an effective segment-based coarse-to-fine SfM algorithm for robustly handling large datasets. Experimental results on challenging video data demonstrate the effectiveness of the proposed system.