 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeedance 2.0: Advancing Video Generation for World Complexity
Apr 15, 2026Seedance 2.0 is a new native multi-modal audio-video generation model, officially released in China in early February 2026. Compared with its predecessors, Seedance 1.0 and 1.5 Pro, Seedance 2.0 adopts a unified, highly efficient, and large-scale architecture for multi-modal audio-video joint generation. This allows it to support four input modalities: text, image, audio, and video, by integrating one of the most comprehensive suites of multi-modal content reference and editing capabilities available in the industry to date. It delivers substantial, well-rounded improvements across all key sub-dimensions of video and audio generation. In both expert evaluations and public user tests, the model has demonstrated performance on par with the leading levels in the field. Seedance 2.0 supports direct generation of audio-video content with durations ranging from 4 to 15 seconds, with native output resolutions of 480p and 720p. For multi-modal inputs as reference, its current open platform supports up to 3 video clips, 9 images, and 3 audio clips. In addition, we provide Seedance 2.0 Fast version, an accelerated variant of Seedance 2.0 designed to boost generation speed for low-latency scenarios. Seedance 2.0 has delivered significant improvements to its foundational generation capabilities and multi-modal generation performance, bringing an enhanced creative experience for end users.
Drive My Way: Preference Alignment of Vision-Language-Action Model for Personalized Driving
Mar 26, 2026Human driving behavior is inherently personal, which is shaped by long-term habits and influenced by short-term intentions. Individuals differ in how they accelerate, brake, merge, yield, and overtake across diverse situations. However, existing end-to-end autonomous driving systems either optimize for generic objectives or rely on fixed driving modes, lacking the ability to adapt to individual preferences or interpret natural language intent. To address this gap, we propose Drive My Way (DMW), a personalized Vision-Language-Action (VLA) driving framework that aligns with users' long-term driving habits and adapts to real-time user instructions. DMW learns a user embedding from our personalized driving dataset collected across multiple real drivers and conditions the policy on this embedding during planning, while natural language instructions provide additional short-term guidance. Closed-loop evaluation on the Bench2Drive benchmark demonstrates that DMW improves style instruction adaptation, and user studies show that its generated behaviors are recognizable as each driver's own style, highlighting personalization as a key capability for human-centered autonomous driving. Our data and code are available at https://dmw-cvpr.github.io/.
NavTrust: Benchmarking Trustworthiness for Embodied Navigation
Mar 19, 2026There are two major categories of embodied navigation: Vision-Language Navigation (VLN), where agents navigate by following natural language instructions; and Object-Goal Navigation (OGN), where agents navigate to a specified target object. However, existing work primarily evaluates model performance under nominal conditions, overlooking the potential corruptions that arise in real-world settings. To address this gap, we present NavTrust, a unified benchmark that systematically corrupts input modalities, including RGB, depth, and instructions, in realistic scenarios and evaluates their impact on navigation performance. To our best knowledge, NavTrust is the first benchmark that exposes embodied navigation agents to diverse RGB-Depth corruptions and instruction variations in a unified framework. Our extensive evaluation of seven state-of-the-art approaches reveals substantial performance degradation under realistic corruptions, which highlights critical robustness gaps and provides a roadmap toward more trustworthy embodied navigation systems. Furthermore, we systematically evaluate four distinct mitigation strategies to enhance robustness against RGB-Depth and instructions corruptions. Our base models include Uni-NaVid and ETPNav. We deployed them on a real mobile robot and observed improved robustness to corruptions. The project website is: https://navtrust.github.io.
Continual Learning of Achieving Forgetting-free and Positive Knowledge Transfer
Jan 09, 2026Existing research on continual learning (CL) of a sequence of tasks focuses mainly on dealing with catastrophic forgetting (CF) to balance the learning plasticity of new tasks and the memory stability of old tasks. However, an ideal CL agent should not only be able to overcome CF, but also encourage positive forward and backward knowledge transfer (KT), i.e., using the learned knowledge from previous tasks for the new task learning (namely FKT), and improving the previous tasks' performance with the knowledge of the new task (namely BKT). To this end, this paper first models CL as an optimization problem in which each sequential learning task aims to achieve its optimal performance under the constraint that both FKT and BKT should be positive. It then proposes a novel Enhanced Task Continual Learning (ETCL) method, which achieves forgetting-free and positive KT. Furthermore, the bounds that can lead to negative FKT and BKT are estimated theoretically. Based on the bounds, a new strategy for online task similarity detection is also proposed to facilitate positive KT. To overcome CF, ETCL learns a set of task-specific binary masks to isolate a sparse sub-network for each task while preserving the performance of a dense network for the task. At the beginning of a new task learning, ETCL tries to align the new task's gradient with that of the sub-network of the previous most similar task to ensure positive FKT. By using a new bi-objective optimization strategy and an orthogonal gradient projection method, ETCL updates only the weights of previous similar tasks at the classification layer to achieve positive BKT. Extensive evaluations demonstrate that the proposed ETCL markedly outperforms strong baselines on dissimilar, similar, and mixed task sequences.
Seedance 1.5 pro: A Native Audio-Visual Joint Generation Foundation Model
Dec 23, 2025Recent strides in video generation have paved the way for unified audio-visual generation. In this work, we present Seedance 1.5 pro, a foundational model engineered specifically for native, joint audio-video generation. Leveraging a dual-branch Diffusion Transformer architecture, the model integrates a cross-modal joint module with a specialized multi-stage data pipeline, achieving exceptional audio-visual synchronization and superior generation quality. To ensure practical utility, we implement meticulous post-training optimizations, including Supervised Fine-Tuning (SFT) on high-quality datasets and Reinforcement Learning from Human Feedback (RLHF) with multi-dimensional reward models. Furthermore, we introduce an acceleration framework that boosts inference speed by over 10X. Seedance 1.5 pro distinguishes itself through precise multilingual and dialect lip-syncing, dynamic cinematic camera control, and enhanced narrative coherence, positioning it as a robust engine for professional-grade content creation. Seedance 1.5 pro is now accessible on Volcano Engine at https://console.volcengine.com/ark/region:ark+cn-beijing/experience/vision?type=GenVideo.
Not All Instances Are Equally Valuable: Towards Influence-Weighted Dataset Distillation
Oct 31, 2025Dataset distillation condenses large datasets into synthetic subsets, achieving performance comparable to training on the full dataset while substantially reducing storage and computation costs. Most existing dataset distillation methods assume that all real instances contribute equally to the process. In practice, real-world datasets contain both informative and redundant or even harmful instances, and directly distilling the full dataset without considering data quality can degrade model performance. In this work, we present Influence-Weighted Distillation IWD, a principled framework that leverages influence functions to explicitly account for data quality in the distillation process. IWD assigns adaptive weights to each instance based on its estimated impact on the distillation objective, prioritizing beneficial data while downweighting less useful or harmful ones. Owing to its modular design, IWD can be seamlessly integrated into diverse dataset distillation frameworks. Our empirical results suggest that integrating IWD tends to improve the quality of distilled datasets and enhance model performance, with accuracy gains of up to 7.8%.
RDD: Retrieval-Based Demonstration Decomposer for Planner Alignment in Long-Horizon Tasks
Oct 16, 2025



To tackle long-horizon tasks, recent hierarchical vision-language-action (VLAs) frameworks employ vision-language model (VLM)-based planners to decompose complex manipulation tasks into simpler sub-tasks that low-level visuomotor policies can easily handle. Typically, the VLM planner is finetuned to learn to decompose a target task. This finetuning requires target task demonstrations segmented into sub-tasks by either human annotation or heuristic rules. However, the heuristic subtasks can deviate significantly from the training data of the visuomotor policy, which degrades task performance. To address these issues, we propose a Retrieval-based Demonstration Decomposer (RDD) that automatically decomposes demonstrations into sub-tasks by aligning the visual features of the decomposed sub-task intervals with those from the training data of the low-level visuomotor policies. Our method outperforms the state-of-the-art sub-task decomposer on both simulation and real-world tasks, demonstrating robustness across diverse settings. Code and more results are available at rdd-neurips.github.io.
SplitMeanFlow: Interval Splitting Consistency in Few-Step Generative Modeling
Jul 22, 2025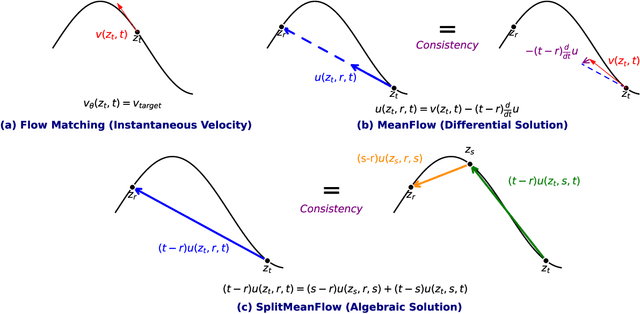


Generative models like Flow Matching have achieved state-of-the-art performance but are often hindered by a computationally expensive iterative sampling process. To address this, recent work has focused on few-step or one-step generation by learning the average velocity field, which directly maps noise to data. MeanFlow, a leading method in this area, learns this field by enforcing a differential identity that connects the average and instantaneous velocities. In this work, we argue that this differential formulation is a limiting special case of a more fundamental principle. We return to the first principles of average velocity and leverage the additivity property of definite integrals. This leads us to derive a novel, purely algebraic identity we term Interval Splitting Consistency. This identity establishes a self-referential relationship for the average velocity field across different time intervals without resorting to any differential operators. Based on this principle, we introduce SplitMeanFlow, a new training framework that enforces this algebraic consistency directly as a learning objective. We formally prove that the differential identity at the core of MeanFlow is recovered by taking the limit of our algebraic consistency as the interval split becomes infinitesimal. This establishes SplitMeanFlow as a direct and more general foundation for learning average velocity fields. From a practical standpoint, our algebraic approach is significantly more efficient, as it eliminates the need for JVP computations, resulting in simpler implementation, more stable training, and broader hardware compatibility. One-step and two-step SplitMeanFlow models have been successfully deployed in large-scale speech synthesis products (such as Doubao), achieving speedups of 20x.
AirV2X: Unified Air-Ground Vehicle-to-Everything Collaboration
Jun 24, 2025While multi-vehicular collaborative driving demonstrates clear advantages over single-vehicle autonomy, traditional infrastructure-based V2X systems remain constrained by substantial deployment costs and the creation of "uncovered danger zones" in rural and suburban areas. We present AirV2X-Perception, a large-scale dataset that leverages Unmanned Aerial Vehicles (UAVs) as a flexible alternative or complement to fixed Road-Side Units (RSUs). Drones offer unique advantages over ground-based perception: complementary bird's-eye-views that reduce occlusions, dynamic positioning capabilities that enable hovering, patrolling, and escorting navigation rules, and significantly lower deployment costs compared to fixed infrastructure. Our dataset comprises 6.73 hours of drone-assisted driving scenarios across urban, suburban, and rural environments with varied weather and lighting conditions. The AirV2X-Perception dataset facilitates the development and standardized evaluation of Vehicle-to-Drone (V2D) algorithms, addressing a critical gap in the rapidly expanding field of aerial-assisted autonomous driving systems. The dataset and development kits are open-sourced at https://github.com/taco-group/AirV2X-Perception.
SAFEFLOW: A Principled Protocol for Trustworthy and Transactional Autonomous Agent Systems
Jun 09, 2025Recent advances in large language models (LLMs) and vision-language models (VLMs) have enabled powerful autonomous agents capable of complex reasoning and multi-modal tool use. Despite their growing capabilities, today's agent frameworks remain fragile, lacking principled mechanisms for secure information flow, reliability, and multi-agent coordination. In this work, we introduce SAFEFLOW, a new protocol-level framework for building trustworthy LLM/VLM-based agents. SAFEFLOW enforces fine-grained information flow control (IFC), precisely tracking provenance, integrity, and confidentiality of all the data exchanged between agents, tools, users, and environments. By constraining LLM reasoning to respect these security labels, SAFEFLOW prevents untrusted or adversarial inputs from contaminating high-integrity decisions. To ensure robustness in concurrent multi-agent settings, SAFEFLOW introduces transactional execution, conflict resolution, and secure scheduling over shared state, preserving global consistency across agents. We further introduce mechanisms, including write-ahead logging, rollback, and secure caches, that further enhance resilience against runtime errors and policy violations. To validate the performances, we built SAFEFLOWBENCH, a comprehensive benchmark suite designed to evaluate agent reliability under adversarial, noisy, and concurrent operational conditions. Extensive experiments demonstrate that agents built with SAFEFLOW maintain impressive task performance and security guarantees even in hostile environments, substantially outperforming state-of-the-art. Together, SAFEFLOW and SAFEFLOWBENCH lay the groundwork for principled, robust, and secure agent ecosystems, advancing the frontier of reliable autonomy.