 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePanoptic-DeepLab: A Simple, Strong, and Fast Baseline for Bottom-Up Panoptic Segmentation
Dec 06, 2019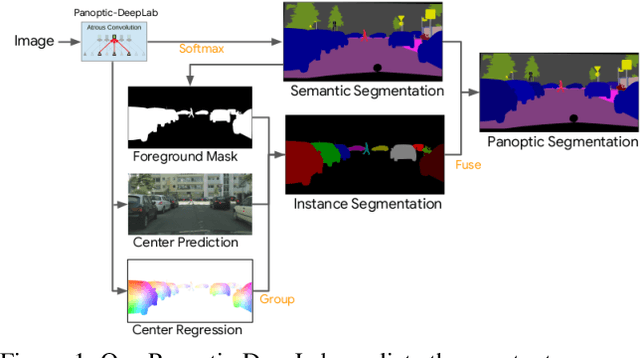
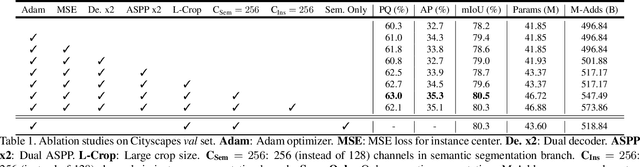
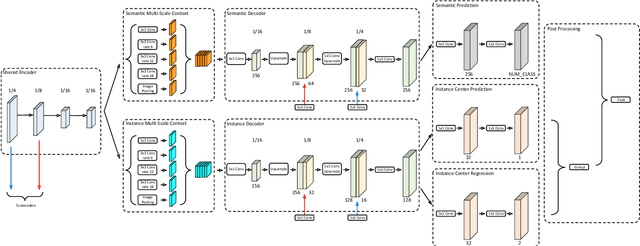
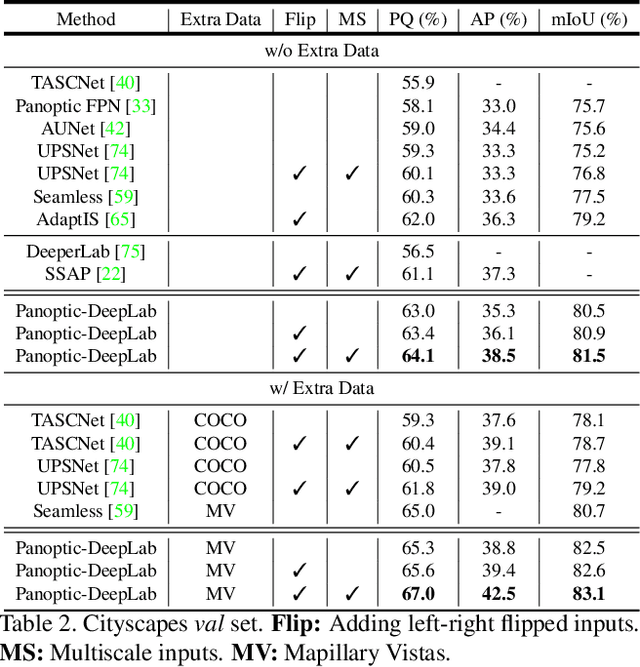
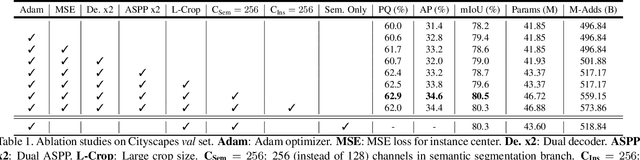
In this work, we introduce Panoptic-DeepLab, a simple, strong, and fast system for panoptic segmentation, aiming to establish a solid baseline for bottom-up methods that can achieve comparable performance of two-stage methods while yielding fast inference speed. In particular, PanopticDeepLab adopts the dual-ASPP and dual-decoder structures specific to semantic, and instance segmentation, respectively. The semantic segmentation branch is the same as the typical design of any semantic segmentation model (e.g., DeepLab), while the instance segmentation branch is class-agnostic, involving a simple instance center regression. As a result, our single Panoptic-DeepLab simultaneously ranks first at all three Cityscapes benchmarks, setting the new state-of-art of 84.2% mIoU, 39.0% AP, and 65.5% PQ on test set. Additionally, equipped with MobileNetV3, Panoptic-DeepLab runs nearly in real-time with a single 1025 x 2049 image (15.8 frames per second), while achieving a competitive performance on Cityscapes (54.1 PQ% on test set). On Mapillary Vistas test set, our ensemble of six models attains 42.7% PQ, outperforming the challenge winner in 2018 by a healthy margin of 1.5%. Finally, our Panoptic-DeepLab also performs on par with several topdown approaches on the challenging COCO dataset. For the first time, we demonstrate a bottom-up approach could deliver state-of-the-art results on panoptic segmentation.
Search to Distill: Pearls are Everywhere but not the Eyes
Nov 20, 2019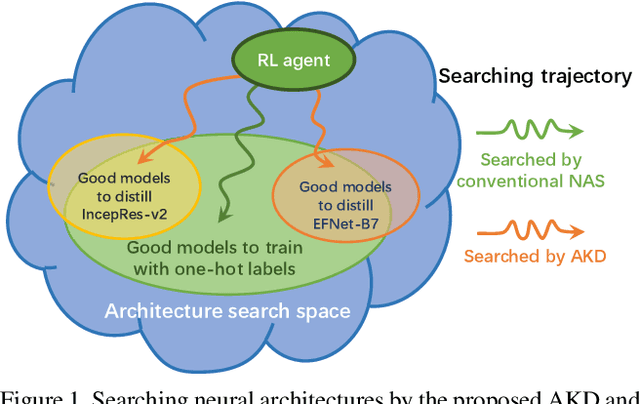
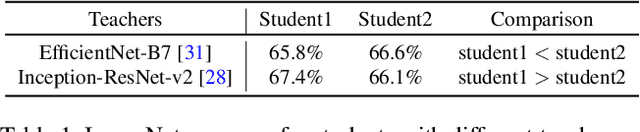
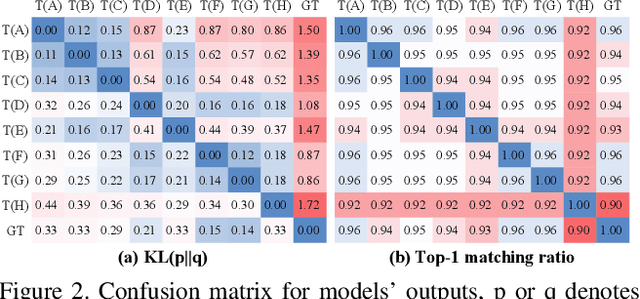
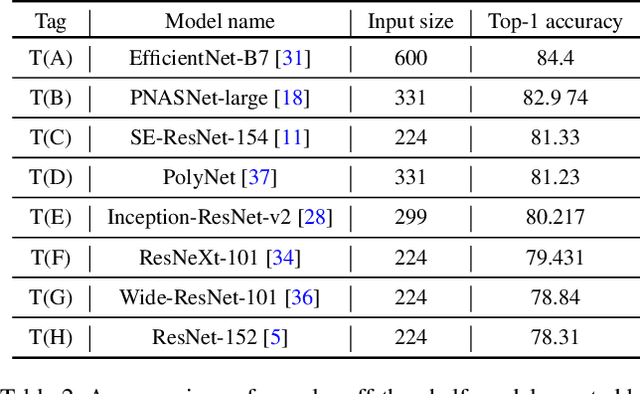
Standard Knowledge Distillation (KD) approaches distill the knowledge of a cumbersome teacher model into the parameters of a student model with a pre-defined architecture. However, the knowledge of a neural network, which is represented by the network's output distribution conditioned on its input, depends not only on its parameters but also on its architecture. Hence, a more generalized approach for KD is to distill the teacher's knowledge into both the parameters and architecture of the student. To achieve this, we present a new Architecture-aware Knowledge Distillation (AKD) approach that finds student models (pearls for the teacher) that are best for distilling the given teacher model. In particular, we leverage Neural Architecture Search (NAS), equipped with our KD-guided reward, to search for the best student architectures for a given teacher. Experimental results show our proposed AKD consistently outperforms the conventional NAS plus KD approach, and achieves state-of-the-art results on the ImageNet classification task under various latency settings. Furthermore, the best AKD student architecture for the ImageNet classification task also transfers well to other tasks such as million level face recognition and ensemble learning.
Panoptic-DeepLab
Oct 24, 2019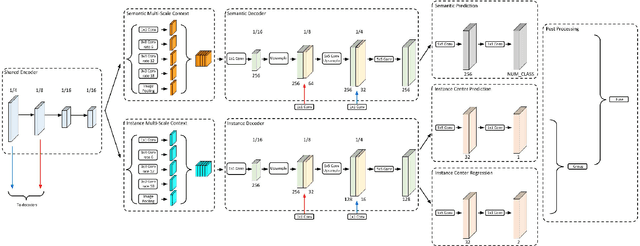
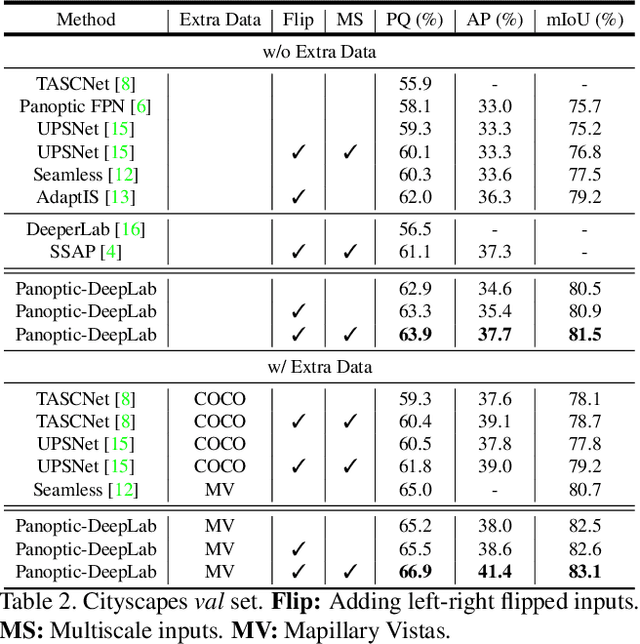
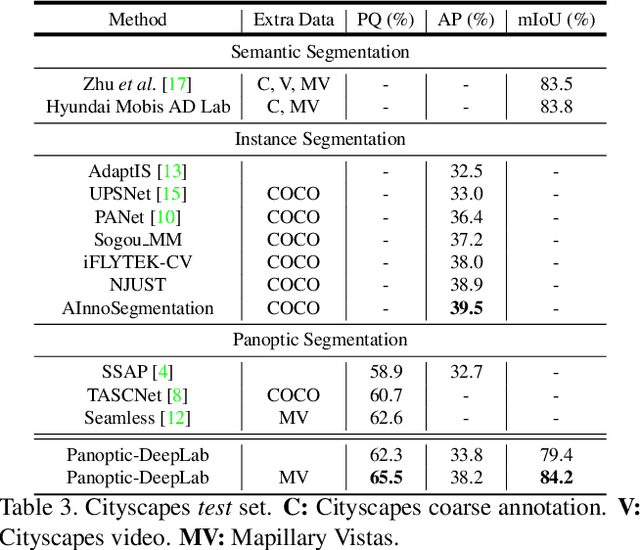
We present Panoptic-DeepLab, a bottom-up and single-shot approach for panoptic segmentation. Our Panoptic-DeepLab is conceptually simple and delivers state-of-the-art results. In particular, we adopt the dual-ASPP and dual-decoder structures specific to semantic, and instance segmentation, respectively. The semantic segmentation branch is the same as the typical design of any semantic segmentation model (e.g., DeepLab), while the instance segmentation branch is class-agnostic, involving a simple instance center regression. Our single Panoptic-DeepLab sets the new state-of-art at all three Cityscapes benchmarks, reaching 84.2% mIoU, 39.0% AP, and 65.5% PQ on test set, and advances results on the other challenging Mapillary Vistas.
SPGNet: Semantic Prediction Guidance for Scene Parsing
Aug 26, 2019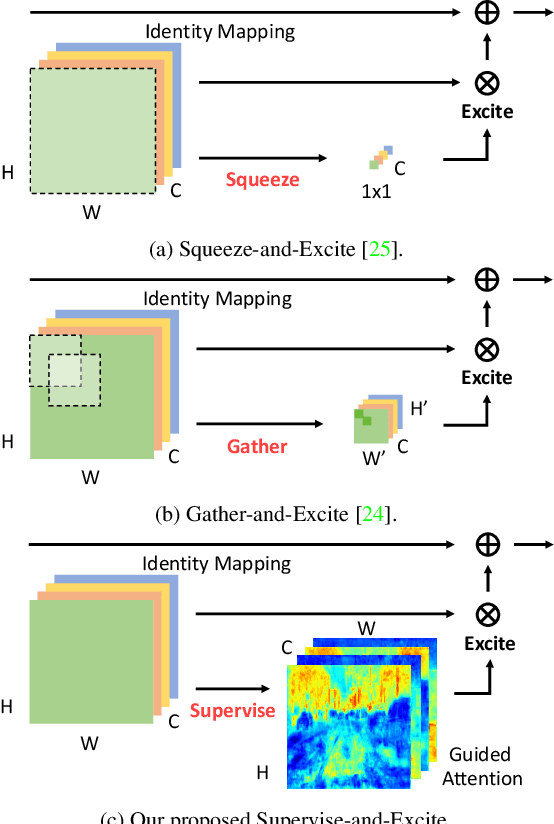
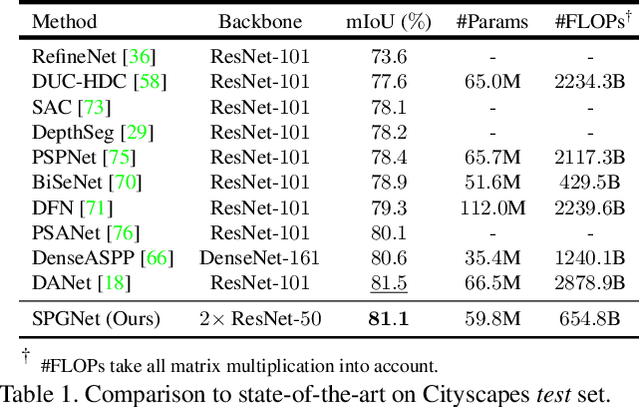
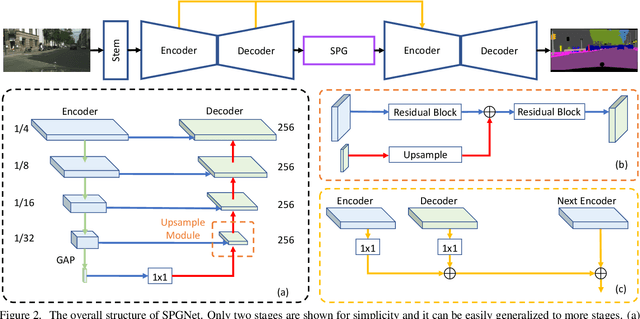

Multi-scale context module and single-stage encoder-decoder structure are commonly employed for semantic segmentation. The multi-scale context module refers to the operations to aggregate feature responses from a large spatial extent, while the single-stage encoder-decoder structure encodes the high-level semantic information in the encoder path and recovers the boundary information in the decoder path. In contrast, multi-stage encoder-decoder networks have been widely used in human pose estimation and show superior performance than their single-stage counterpart. However, few efforts have been attempted to bring this effective design to semantic segmentation. In this work, we propose a Semantic Prediction Guidance (SPG) module which learns to re-weight the local features through the guidance from pixel-wise semantic prediction. We find that by carefully re-weighting features across stages, a two-stage encoder-decoder network coupled with our proposed SPG module can significantly outperform its one-stage counterpart with similar parameters and computations. Finally, we report experimental results on the semantic segmentation benchmark Cityscapes, in which our SPGNet attains 81.1% on the test set using only 'fine' annotations.
Searching for MobileNetV3
May 14, 2019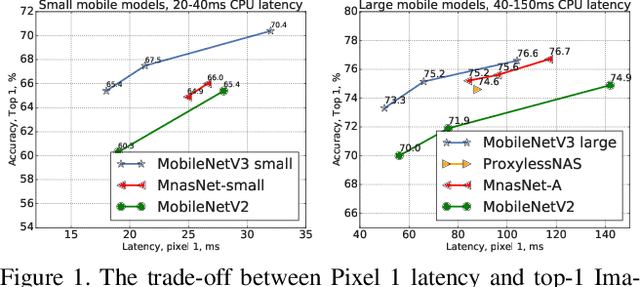
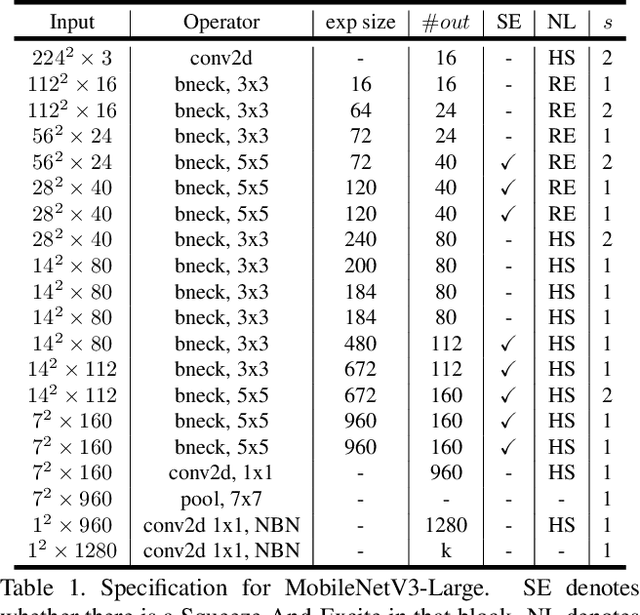
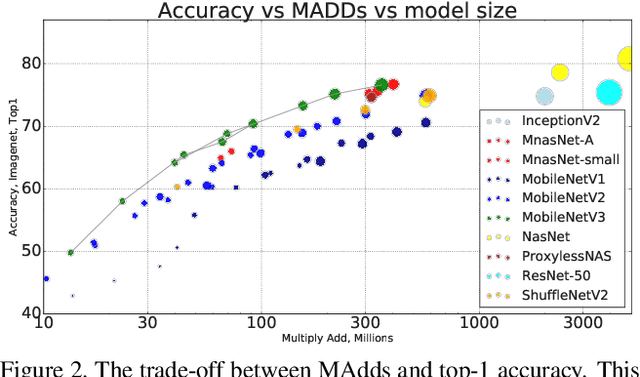
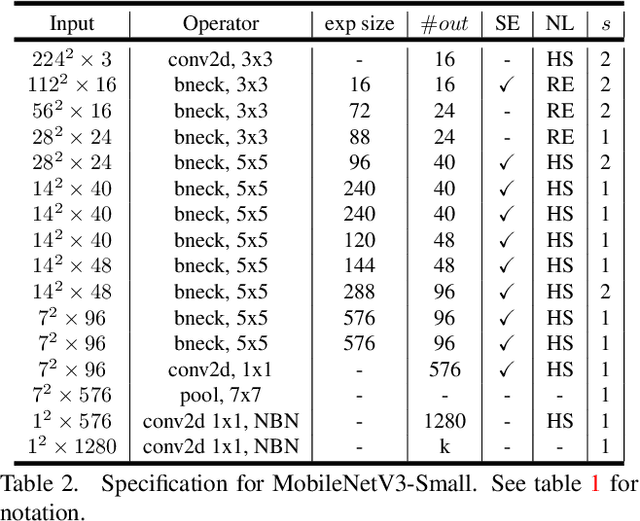
We present the next generation of MobileNets based on a combination of complementary search techniques as well as a novel architecture design. MobileNetV3 is tuned to mobile phone CPUs through a combination of hardware aware network architecture search (NAS) complemented by the NetAdapt algorithm and then subsequently improved through novel architecture advances. This paper starts the exploration of how automated search algorithms and network design can work together to harness complementary approaches improving the overall state of the art. Through this process we create two new MobileNet models for release: MobileNetV3-Large and MobileNetV3-Small which are targeted for high and low resource use cases. These models are then adapted and applied to the tasks of object detection and semantic segmentation. For the task of semantic segmentation (or any dense pixel prediction), we propose a new efficient segmentation decoder Lite Reduced Atrous Spatial Pyramid Pooling (LR-ASPP). We achieve new state of the art results for mobile classification, detection and segmentation. MobileNetV3-Large is 3.2% more accurate on ImageNet classification while reducing latency by 15% compared to MobileNetV2. MobileNetV2-Small is 4.6% more accurate while reducing latency by 5% compared to MobileNetV2. MobileNetV3-Large detection is 25% faster at roughly the same accuracy as MobileNetV2 on COCO detection. MobileNetV3-Large LR-ASPP is 30% faster than MobileNetV2 R-ASPP at similar accuracy for Cityscapes segmentation.
DeeperLab: Single-Shot Image Parser
Mar 12, 2019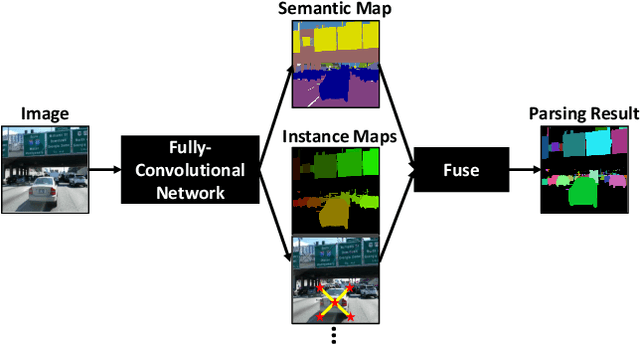
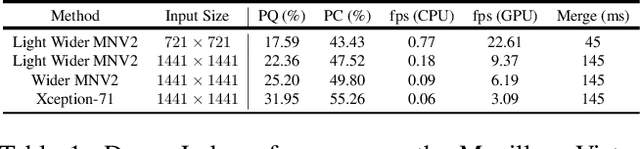


We present a single-shot, bottom-up approach for whole image parsing. Whole image parsing, also known as Panoptic Segmentation, generalizes the tasks of semantic segmentation for 'stuff' classes and instance segmentation for 'thing' classes, assigning both semantic and instance labels to every pixel in an image. Recent approaches to whole image parsing typically employ separate standalone modules for the constituent semantic and instance segmentation tasks and require multiple passes of inference. Instead, the proposed DeeperLab image parser performs whole image parsing with a significantly simpler, fully convolutional approach that jointly addresses the semantic and instance segmentation tasks in a single-shot manner, resulting in a streamlined system that better lends itself to fast processing. For quantitative evaluation, we use both the instance-based Panoptic Quality (PQ) metric and the proposed region-based Parsing Covering (PC) metric, which better captures the image parsing quality on 'stuff' classes and larger object instances. We report experimental results on the challenging Mapillary Vistas dataset, in which our single model achieves 31.95% (val) / 31.6% PQ (test) and 55.26% PC (val) with 3 frames per second (fps) on GPU or near real-time speed (22.6 fps on GPU) with reduced accuracy.
Searching for Efficient Multi-Scale Architectures for Dense Image Prediction
Sep 11, 2018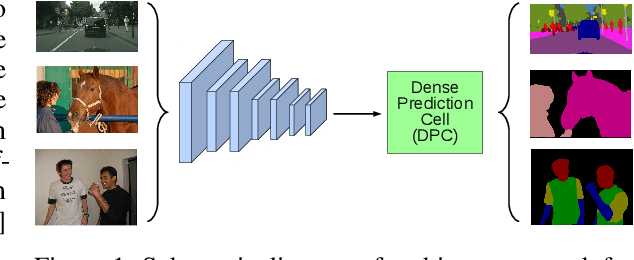
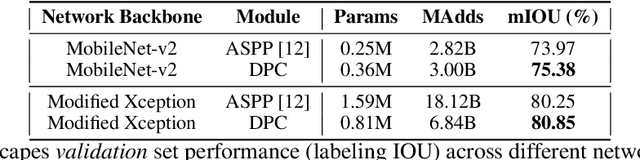
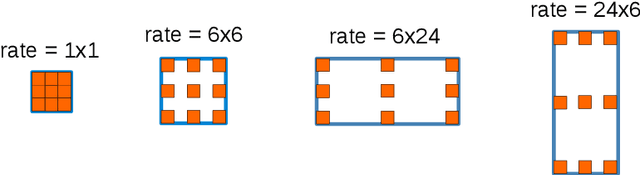
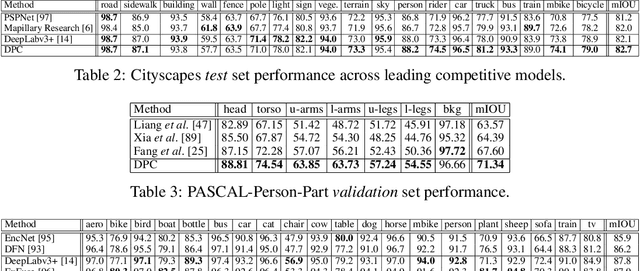
The design of neural network architectures is an important component for achieving state-of-the-art performance with machine learning systems across a broad array of tasks. Much work has endeavored to design and build architectures automatically through clever construction of a search space paired with simple learning algorithms. Recent progress has demonstrated that such meta-learning methods may exceed scalable human-invented architectures on image classification tasks. An open question is the degree to which such methods may generalize to new domains. In this work we explore the construction of meta-learning techniques for dense image prediction focused on the tasks of scene parsing, person-part segmentation, and semantic image segmentation. Constructing viable search spaces in this domain is challenging because of the multi-scale representation of visual information and the necessity to operate on high resolution imagery. Based on a survey of techniques in dense image prediction, we construct a recursive search space and demonstrate that even with efficient random search, we can identify architectures that outperform human-invented architectures and achieve state-of-the-art performance on three dense prediction tasks including 82.7\% on Cityscapes (street scene parsing), 71.3\% on PASCAL-Person-Part (person-part segmentation), and 87.9\% on PASCAL VOC 2012 (semantic image segmentation). Additionally, the resulting architecture is more computationally efficient, requiring half the parameters and half the computational cost as previous state of the art systems.
Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation
Aug 22, 2018

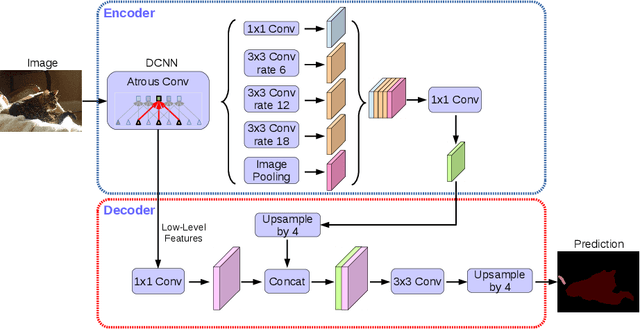
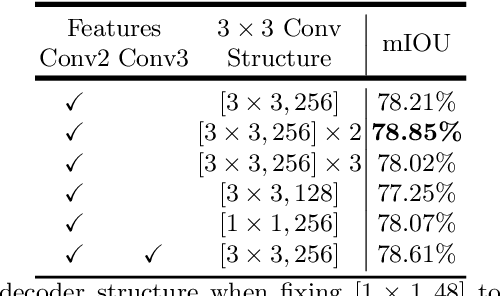
Spatial pyramid pooling module or encode-decoder structure are used in deep neural networks for semantic segmentation task. The former networks are able to encode multi-scale contextual information by probing the incoming features with filters or pooling operations at multiple rates and multiple effective fields-of-view, while the latter networks can capture sharper object boundaries by gradually recovering the spatial information. In this work, we propose to combine the advantages from both methods. Specifically, our proposed model, DeepLabv3+, extends DeepLabv3 by adding a simple yet effective decoder module to refine the segmentation results especially along object boundaries. We further explore the Xception model and apply the depthwise separable convolution to both Atrous Spatial Pyramid Pooling and decoder modules, resulting in a faster and stronger encoder-decoder network. We demonstrate the effectiveness of the proposed model on PASCAL VOC 2012 and Cityscapes datasets, achieving the test set performance of 89.0\% and 82.1\% without any post-processing. Our paper is accompanied with a publicly available reference implementation of the proposed models in Tensorflow at \url{https://github.com/tensorflow/models/tree/master/research/deeplab}.
Spatially Adaptive Computation Time for Residual Networks
Jul 02, 2017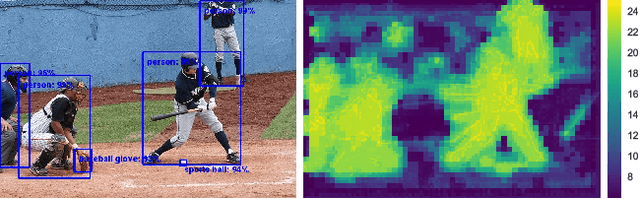
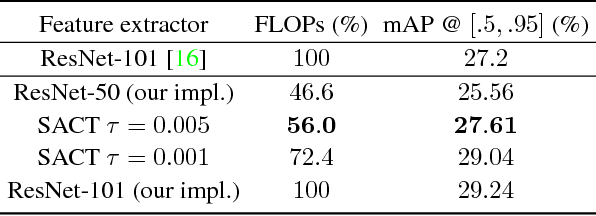
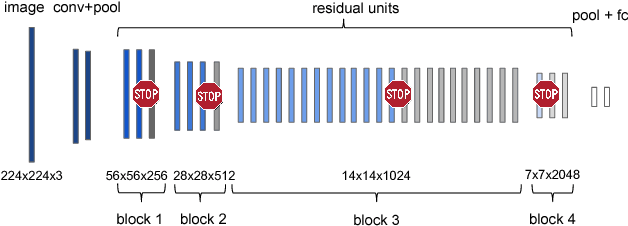
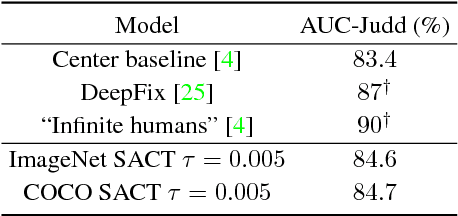
This paper proposes a deep learning architecture based on Residual Network that dynamically adjusts the number of executed layers for the regions of the image. This architecture is end-to-end trainable, deterministic and problem-agnostic. It is therefore applicable without any modifications to a wide range of computer vision problems such as image classification, object detection and image segmentation. We present experimental results showing that this model improves the computational efficiency of Residual Networks on the challenging ImageNet classification and COCO object detection datasets. Additionally, we evaluate the computation time maps on the visual saliency dataset cat2000 and find that they correlate surprisingly well with human eye fixation positions.
3D Object Proposals using Stereo Imagery for Accurate Object Class Detection
Apr 25, 2017
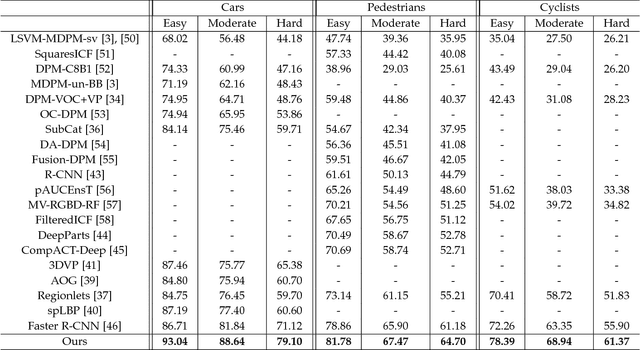
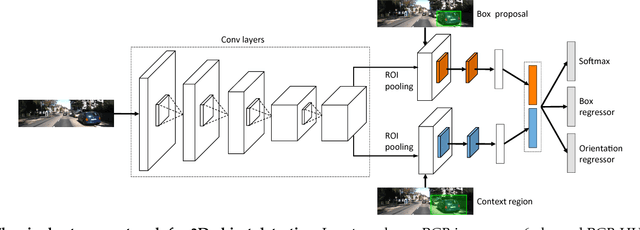
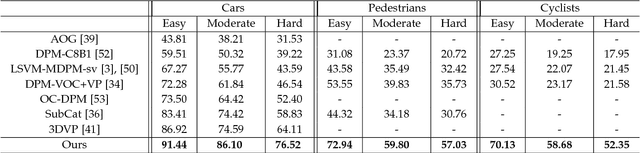
The goal of this paper is to perform 3D object detection in the context of autonomous driving. Our method first aims at generating a set of high-quality 3D object proposals by exploiting stereo imagery. We formulate the problem as minimizing an energy function that encodes object size priors, placement of objects on the ground plane as well as several depth informed features that reason about free space, point cloud densities and distance to the ground. We then exploit a CNN on top of these proposals to perform object detection. In particular, we employ a convolutional neural net (CNN) that exploits context and depth information to jointly regress to 3D bounding box coordinates and object pose. Our experiments show significant performance gains over existing RGB and RGB-D object proposal methods on the challenging KITTI benchmark. When combined with the CNN, our approach outperforms all existing results in object detection and orientation estimation tasks for all three KITTI object classes. Furthermore, we experiment also with the setting where LIDAR information is available, and show that using both LIDAR and stereo leads to the best result.