 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Video-to-SFX: Video to Audio Synthesis with Environmentally Aware Speech
Sep 19, 2025



The generation of realistic, context-aware audio is important in real-world applications such as video game development. While existing video-to-audio (V2A) methods mainly focus on Foley sound generation, they struggle to produce intelligible speech. Meanwhile, current environmental speech synthesis approaches remain text-driven and fail to temporally align with dynamic video content. In this paper, we propose Beyond Video-to-SFX (BVS), a method to generate synchronized audio with environmentally aware intelligible speech for given videos. We introduce a two-stage modeling method: (1) stage one is a video-guided audio semantic (V2AS) model to predict unified audio semantic tokens conditioned on phonetic cues; (2) stage two is a video-conditioned semantic-to-acoustic (VS2A) model that refines semantic tokens into detailed acoustic tokens. Experiments demonstrate the effectiveness of BVS in scenarios such as video-to-context-aware speech synthesis and immersive audio background conversion, with ablation studies further validating our design. Our demonstration is available at~\href{https://xinleiniu.github.io/BVS-demo/}{BVS-Demo}.
MemoryVLA: Perceptual-Cognitive Memory in Vision-Language-Action Models for Robotic Manipulation
Aug 26, 2025



Temporal context is essential for robotic manipulation because such tasks are inherently non-Markovian, yet mainstream VLA models typically overlook it and struggle with long-horizon, temporally dependent tasks. Cognitive science suggests that humans rely on working memory to buffer short-lived representations for immediate control, while the hippocampal system preserves verbatim episodic details and semantic gist of past experience for long-term memory. Inspired by these mechanisms, we propose MemoryVLA, a Cognition-Memory-Action framework for long-horizon robotic manipulation. A pretrained VLM encodes the observation into perceptual and cognitive tokens that form working memory, while a Perceptual-Cognitive Memory Bank stores low-level details and high-level semantics consolidated from it. Working memory retrieves decision-relevant entries from the bank, adaptively fuses them with current tokens, and updates the bank by merging redundancies. Using these tokens, a memory-conditioned diffusion action expert yields temporally aware action sequences. We evaluate MemoryVLA on 150+ simulation and real-world tasks across three robots. On SimplerEnv-Bridge, Fractal, and LIBERO-5 suites, it achieves 71.9%, 72.7%, and 96.5% success rates, respectively, all outperforming state-of-the-art baselines CogACT and pi-0, with a notable +14.6 gain on Bridge. On 12 real-world tasks spanning general skills and long-horizon temporal dependencies, MemoryVLA achieves 84.0% success rate, with long-horizon tasks showing a +26 improvement over state-of-the-art baseline. Project Page: https://shihao1895.github.io/MemoryVLA
ASTRA: Autonomous Spatial-Temporal Red-teaming for AI Software Assistants
Aug 05, 2025AI coding assistants like GitHub Copilot are rapidly transforming software development, but their safety remains deeply uncertain-especially in high-stakes domains like cybersecurity. Current red-teaming tools often rely on fixed benchmarks or unrealistic prompts, missing many real-world vulnerabilities. We present ASTRA, an automated agent system designed to systematically uncover safety flaws in AI-driven code generation and security guidance systems. ASTRA works in three stages: (1) it builds structured domain-specific knowledge graphs that model complex software tasks and known weaknesses; (2) it performs online vulnerability exploration of each target model by adaptively probing both its input space, i.e., the spatial exploration, and its reasoning processes, i.e., the temporal exploration, guided by the knowledge graphs; and (3) it generates high-quality violation-inducing cases to improve model alignment. Unlike prior methods, ASTRA focuses on realistic inputs-requests that developers might actually ask-and uses both offline abstraction guided domain modeling and online domain knowledge graph adaptation to surface corner-case vulnerabilities. Across two major evaluation domains, ASTRA finds 11-66% more issues than existing techniques and produces test cases that lead to 17% more effective alignment training, showing its practical value for building safer AI systems.
StepFun-Prover Preview: Let's Think and Verify Step by Step
Jul 27, 2025We present StepFun-Prover Preview, a large language model designed for formal theorem proving through tool-integrated reasoning. Using a reinforcement learning pipeline that incorporates tool-based interactions, StepFun-Prover can achieve strong performance in generating Lean 4 proofs with minimal sampling. Our approach enables the model to emulate human-like problem-solving strategies by iteratively refining proofs based on real-time environment feedback. On the miniF2F-test benchmark, StepFun-Prover achieves a pass@1 success rate of $70.0\%$. Beyond advancing benchmark performance, we introduce an end-to-end training framework for developing tool-integrated reasoning models, offering a promising direction for automated theorem proving and Math AI assistant.
Step-Audio 2 Technical Report
Jul 24, 2025
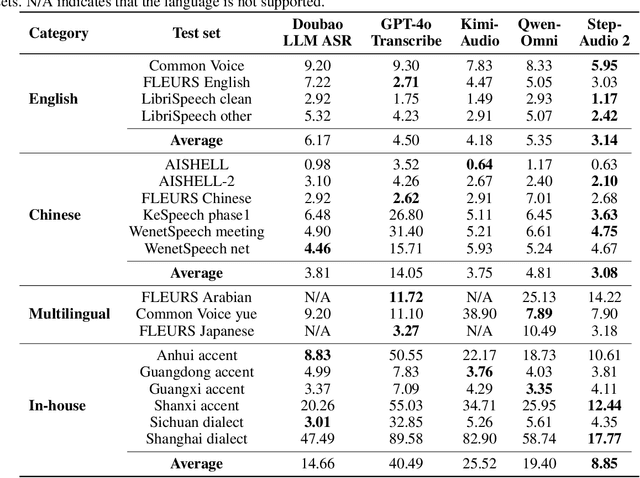

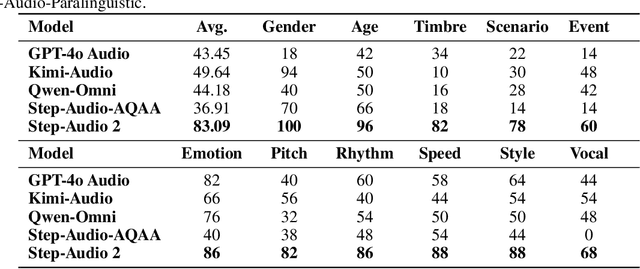
This paper presents Step-Audio 2, an end-to-end multi-modal large language model designed for industry-strength audio understanding and speech conversation. By integrating a latent audio encoder and reasoning-centric reinforcement learning (RL), Step-Audio 2 achieves promising performance in automatic speech recognition (ASR) and audio understanding. To facilitate genuine end-to-end speech conversation, Step-Audio 2 incorporates the generation of discrete audio tokens into language modeling, significantly enhancing its responsiveness to paralinguistic information such as speaking styles and emotions. To effectively leverage the rich textual and acoustic knowledge in real-world data, Step-Audio 2 integrates retrieval-augmented generation (RAG) and is able to call external tools such as web search to mitigate hallucination and audio search to switch timbres. Trained on millions of hours of speech and audio data, Step-Audio 2 delivers intelligence and expressiveness across diverse conversational scenarios. Evaluation results demonstrate that Step-Audio 2 achieves state-of-the-art performance on various audio understanding and conversational benchmarks compared to other open-source and commercial solutions. Please visit https://github.com/stepfun-ai/Step-Audio2 for more information.
Holistic Tokenizer for Autoregressive Image Generation
Jul 03, 2025The vanilla autoregressive image generation model generates visual tokens in a step-by-step fashion, which limits the ability to capture holistic relationships among token sequences. Moreover, most visual tokenizers map local image patches into latent tokens, leading to limited global information. To address this, we introduce \textit{Hita}, a novel image tokenizer for autoregressive (AR) image generation. It introduces a holistic-to-local tokenization scheme with learnable holistic queries and local patch tokens. Besides, Hita incorporates two key strategies for improved alignment with the AR generation process: 1) it arranges a sequential structure with holistic tokens at the beginning followed by patch-level tokens while using causal attention to maintain awareness of previous tokens; and 2) before feeding the de-quantized tokens into the decoder, Hita adopts a lightweight fusion module to control information flow to prioritize holistic tokens. Extensive experiments show that Hita accelerates the training speed of AR generators and outperforms those trained with vanilla tokenizers, achieving \textbf{2.59 FID} and \textbf{281.9 IS} on the ImageNet benchmark. A detailed analysis of the holistic representation highlights its ability to capture global image properties such as textures, materials, and shapes. Additionally, Hita also demonstrates effectiveness in zero-shot style transfer and image in-painting. The code is available at \href{https://github.com/CVMI-Lab/Hita}{https://github.com/CVMI-Lab/Hita}
MGC: A Compiler Framework Exploiting Compositional Blindness in Aligned LLMs for Malware Generation
Jul 02, 2025



Large language models (LLMs) have democratized software development, reducing the expertise barrier for programming complex applications. This accessibility extends to malicious software development, raising significant security concerns. While LLM providers have implemented alignment mechanisms to prevent direct generation of overtly malicious code, these safeguards predominantly evaluate individual prompts in isolation, overlooking a critical vulnerability: malicious operations can be systematically decomposed into benign-appearing sub-tasks. In this paper, we introduce the Malware Generation Compiler (MGC), a novel framework that leverages this vulnerability through modular decomposition and alignment-evasive generation. MGC employs a specialized Malware Description Intermediate Representation (MDIR) to bridge high-level malicious intents and benign-appearing code snippets. Extensive evaluation demonstrates that our attack reliably generates functional malware across diverse task specifications and categories, outperforming jailbreaking methods by +365.79% and underground services by +78.07% in correctness on three benchmark datasets. Case studies further show that MGC can reproduce and even enhance 16 real-world malware samples. This work provides critical insights for security researchers by exposing the risks of compositional attacks against aligned AI systems. Demonstrations are available at https://sites.google.com/view/malware-generation-compiler.
Can Mixture-of-Experts Surpass Dense LLMs Under Strictly Equal Resources?
Jun 13, 2025Mixture-of-Experts (MoE) language models dramatically expand model capacity and achieve remarkable performance without increasing per-token compute. However, can MoEs surpass dense architectures under strictly equal resource constraints - that is, when the total parameter count, training compute, and data budget are identical? This question remains under-explored despite its significant practical value and potential. In this paper, we propose a novel perspective and methodological framework to study this question thoroughly. First, we comprehensively investigate the architecture of MoEs and achieve an optimal model design that maximizes the performance. Based on this, we subsequently find that an MoE model with activation rate in an optimal region is able to outperform its dense counterpart under the same total parameter, training compute and data resource. More importantly, this optimal region remains consistent across different model sizes. Although additional amount of data turns out to be a trade-off for the enhanced performance, we show that this can be resolved via reusing data. We validate our findings through extensive experiments, training nearly 200 language models at 2B scale and over 50 at 7B scale, cumulatively processing 50 trillion tokens. All models will be released publicly.
Farseer: A Refined Scaling Law in Large Language Models
Jun 12, 2025



Training Large Language Models (LLMs) is prohibitively expensive, creating a critical scaling gap where insights from small-scale experiments often fail to transfer to resource-intensive production systems, thereby hindering efficient innovation. To bridge this, we introduce Farseer, a novel and refined scaling law offering enhanced predictive accuracy across scales. By systematically constructing a model loss surface $L(N,D)$, Farseer achieves a significantly better fit to empirical data than prior laws (e.g., Chinchilla's law). Our methodology yields accurate, robust, and highly generalizable predictions, demonstrating excellent extrapolation capabilities, improving upon Chinchilla's law by reducing extrapolation error by 433\%. This allows for the reliable evaluation of competing training strategies across all $(N,D)$ settings, enabling conclusions from small-scale ablation studies to be confidently extrapolated to predict large-scale performance. Furthermore, Farseer provides new insights into optimal compute allocation, better reflecting the nuanced demands of modern LLM training. To validate our approach, we trained an extensive suite of approximately 1,000 LLMs across diverse scales and configurations, consuming roughly 3 million NVIDIA H100 GPU hours. We are comprehensively open-sourcing all models, data, results, and logs at https://github.com/Farseer-Scaling-Law/Farseer to foster further research.
SOFT: Selective Data Obfuscation for Protecting LLM Fine-tuning against Membership Inference Attacks
Jun 12, 2025



Large language models (LLMs) have achieved remarkable success and are widely adopted for diverse applications. However, fine-tuning these models often involves private or sensitive information, raising critical privacy concerns. In this work, we conduct the first comprehensive study evaluating the vulnerability of fine-tuned LLMs to membership inference attacks (MIAs). Our empirical analysis demonstrates that MIAs exploit the loss reduction during fine-tuning, making them highly effective in revealing membership information. These findings motivate the development of our defense. We propose SOFT (\textbf{S}elective data \textbf{O}bfuscation in LLM \textbf{F}ine-\textbf{T}uning), a novel defense technique that mitigates privacy leakage by leveraging influential data selection with an adjustable parameter to balance utility preservation and privacy protection. Our extensive experiments span six diverse domains and multiple LLM architectures and scales. Results show that SOFT effectively reduces privacy risks while maintaining competitive model performance, offering a practical and scalable solution to safeguard sensitive information in fine-tuned LLMs.