 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHabitat 3.0: A Co-Habitat for Humans, Avatars and Robots
Oct 19, 2023



We present Habitat 3.0: a simulation platform for studying collaborative human-robot tasks in home environments. Habitat 3.0 offers contributions across three dimensions: (1) Accurate humanoid simulation: addressing challenges in modeling complex deformable bodies and diversity in appearance and motion, all while ensuring high simulation speed. (2) Human-in-the-loop infrastructure: enabling real human interaction with simulated robots via mouse/keyboard or a VR interface, facilitating evaluation of robot policies with human input. (3) Collaborative tasks: studying two collaborative tasks, Social Navigation and Social Rearrangement. Social Navigation investigates a robot's ability to locate and follow humanoid avatars in unseen environments, whereas Social Rearrangement addresses collaboration between a humanoid and robot while rearranging a scene. These contributions allow us to study end-to-end learned and heuristic baselines for human-robot collaboration in-depth, as well as evaluate them with humans in the loop. Our experiments demonstrate that learned robot policies lead to efficient task completion when collaborating with unseen humanoid agents and human partners that might exhibit behaviors that the robot has not seen before. Additionally, we observe emergent behaviors during collaborative task execution, such as the robot yielding space when obstructing a humanoid agent, thereby allowing the effective completion of the task by the humanoid agent. Furthermore, our experiments using the human-in-the-loop tool demonstrate that our automated evaluation with humanoids can provide an indication of the relative ordering of different policies when evaluated with real human collaborators. Habitat 3.0 unlocks interesting new features in simulators for Embodied AI, and we hope it paves the way for a new frontier of embodied human-AI interaction capabilities.
Neural Priming for Sample-Efficient Adaptation
Jun 24, 2023



We propose Neural Priming, a technique for adapting large pretrained models to distribution shifts and downstream tasks given few or no labeled examples. Presented with class names or unlabeled test samples, Neural Priming enables the model to recall and conditions its parameters on relevant data seen throughout pretraining, thereby priming it for the test distribution. Neural Priming can be performed at test time, even for pretraining datasets as large as LAION-2B. Performing lightweight updates on the recalled data significantly improves accuracy across a variety of distribution shift and transfer learning benchmarks. Concretely, in the zero-shot setting, we see a 2.45% improvement in accuracy on ImageNet and 3.81% accuracy improvement on average across standard transfer learning benchmarks. Further, using Neural Priming at inference to adapt to distribution shift, we see a 1.41% accuracy improvement on ImageNetV2. These results demonstrate the effectiveness of Neural Priming in addressing the challenge of limited labeled data and changing distributions. Code is available at github.com/RAIVNLab/neural-priming.
HomeRobot: Open-Vocabulary Mobile Manipulation
Jun 20, 2023



HomeRobot (noun): An affordable compliant robot that navigates homes and manipulates a wide range of objects in order to complete everyday tasks. Open-Vocabulary Mobile Manipulation (OVMM) is the problem of picking any object in any unseen environment, and placing it in a commanded location. This is a foundational challenge for robots to be useful assistants in human environments, because it involves tackling sub-problems from across robotics: perception, language understanding, navigation, and manipulation are all essential to OVMM. In addition, integration of the solutions to these sub-problems poses its own substantial challenges. To drive research in this area, we introduce the HomeRobot OVMM benchmark, where an agent navigates household environments to grasp novel objects and place them on target receptacles. HomeRobot has two components: a simulation component, which uses a large and diverse curated object set in new, high-quality multi-room home environments; and a real-world component, providing a software stack for the low-cost Hello Robot Stretch to encourage replication of real-world experiments across labs. We implement both reinforcement learning and heuristic (model-based) baselines and show evidence of sim-to-real transfer. Our baselines achieve a 20% success rate in the real world; our experiments identify ways future research work improve performance. See videos on our website: https://ovmm.github.io/.
Galactic: Scaling End-to-End Reinforcement Learning for Rearrangement at 100k Steps-Per-Second
Jun 13, 2023



We present Galactic, a large-scale simulation and reinforcement-learning (RL) framework for robotic mobile manipulation in indoor environments. Specifically, a Fetch robot (equipped with a mobile base, 7DoF arm, RGBD camera, egomotion, and onboard sensing) is spawned in a home environment and asked to rearrange objects - by navigating to an object, picking it up, navigating to a target location, and then placing the object at the target location. Galactic is fast. In terms of simulation speed (rendering + physics), Galactic achieves over 421,000 steps-per-second (SPS) on an 8-GPU node, which is 54x faster than Habitat 2.0 (7699 SPS). More importantly, Galactic was designed to optimize the entire rendering + physics + RL interplay since any bottleneck in the interplay slows down training. In terms of simulation+RL speed (rendering + physics + inference + learning), Galactic achieves over 108,000 SPS, which 88x faster than Habitat 2.0 (1243 SPS). These massive speed-ups not only drastically cut the wall-clock training time of existing experiments, but also unlock an unprecedented scale of new experiments. First, Galactic can train a mobile pick skill to >80% accuracy in under 16 minutes, a 100x speedup compared to the over 24 hours it takes to train the same skill in Habitat 2.0. Second, we use Galactic to perform the largest-scale experiment to date for rearrangement using 5B steps of experience in 46 hours, which is equivalent to 20 years of robot experience. This scaling results in a single neural network composed of task-agnostic components achieving 85% success in GeometricGoal rearrangement, compared to 0% success reported in Habitat 2.0 for the same approach. The code is available at github.com/facebookresearch/galactic.
Moving Forward by Moving Backward: Embedding Action Impact over Action Semantics
Apr 24, 2023



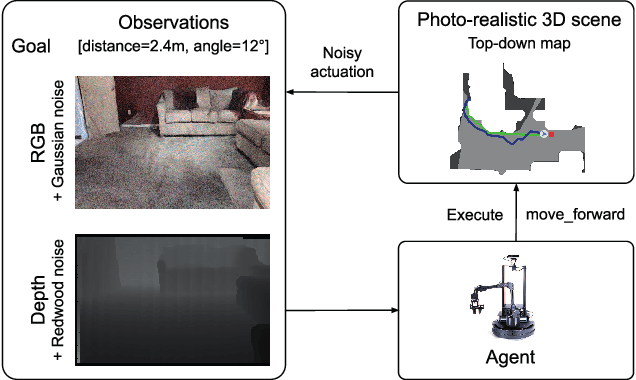
A common assumption when training embodied agents is that the impact of taking an action is stable; for instance, executing the "move ahead" action will always move the agent forward by a fixed distance, perhaps with some small amount of actuator-induced noise. This assumption is limiting; an agent may encounter settings that dramatically alter the impact of actions: a move ahead action on a wet floor may send the agent twice as far as it expects and using the same action with a broken wheel might transform the expected translation into a rotation. Instead of relying that the impact of an action stably reflects its pre-defined semantic meaning, we propose to model the impact of actions on-the-fly using latent embeddings. By combining these latent action embeddings with a novel, transformer-based, policy head, we design an Action Adaptive Policy (AAP). We evaluate our AAP on two challenging visual navigation tasks in the AI2-THOR and Habitat environments and show that our AAP is highly performant even when faced, at inference-time with missing actions and, previously unseen, perturbed action space. Moreover, we observe significant improvement in robustness against these actions when evaluating in real-world scenarios.
ENTL: Embodied Navigation Trajectory Learner
Apr 07, 2023



We propose Embodied Navigation Trajectory Learner (ENTL), a method for extracting long sequence representations for embodied navigation. Our approach unifies world modeling, localization and imitation learning into a single sequence prediction task. We train our model using vector-quantized predictions of future states conditioned on current states and actions. ENTL's generic architecture enables sharing of the spatio-temporal sequence encoder for multiple challenging embodied tasks. We achieve competitive performance on navigation tasks using significantly less data than strong baselines while performing auxiliary tasks such as localization and future frame prediction (a proxy for world modeling). A key property of our approach is that the model is pre-trained without any explicit reward signal, which makes the resulting model generalizable to multiple tasks and environments.
Navigating to Objects Specified by Images
Apr 03, 2023



Images are a convenient way to specify which particular object instance an embodied agent should navigate to. Solving this task requires semantic visual reasoning and exploration of unknown environments. We present a system that can perform this task in both simulation and the real world. Our modular method solves sub-tasks of exploration, goal instance re-identification, goal localization, and local navigation. We re-identify the goal instance in egocentric vision using feature-matching and localize the goal instance by projecting matched features to a map. Each sub-task is solved using off-the-shelf components requiring zero fine-tuning. On the HM3D InstanceImageNav benchmark, this system outperforms a baseline end-to-end RL policy 7x and a state-of-the-art ImageNav model 2.3x (56% vs 25% success). We deploy this system to a mobile robot platform and demonstrate effective real-world performance, achieving an 88% success rate across a home and an office environment.
Neural Radiance Field Codebooks
Jan 10, 2023



Compositional representations of the world are a promising step towards enabling high-level scene understanding and efficient transfer to downstream tasks. Learning such representations for complex scenes and tasks remains an open challenge. Towards this goal, we introduce Neural Radiance Field Codebooks (NRC), a scalable method for learning object-centric representations through novel view reconstruction. NRC learns to reconstruct scenes from novel views using a dictionary of object codes which are decoded through a volumetric renderer. This enables the discovery of reoccurring visual and geometric patterns across scenes which are transferable to downstream tasks. We show that NRC representations transfer well to object navigation in THOR, outperforming 2D and 3D representation learning methods by 3.1% success rate. We demonstrate that our approach is able to perform unsupervised segmentation for more complex synthetic (THOR) and real scenes (NYU Depth) better than prior methods (29% relative improvement). Finally, we show that NRC improves on the task of depth ordering by 5.5% accuracy in THOR.
Ask4Help: Learning to Leverage an Expert for Embodied Tasks
Nov 18, 2022Embodied AI agents continue to become more capable every year with the advent of new models, environments, and benchmarks, but are still far away from being performant and reliable enough to be deployed in real, user-facing, applications. In this paper, we ask: can we bridge this gap by enabling agents to ask for assistance from an expert such as a human being? To this end, we propose the Ask4Help policy that augments agents with the ability to request, and then use expert assistance. Ask4Help policies can be efficiently trained without modifying the original agent's parameters and learn a desirable trade-off between task performance and the amount of requested help, thereby reducing the cost of querying the expert. We evaluate Ask4Help on two different tasks -- object goal navigation and room rearrangement and see substantial improvements in performance using minimal help. On object navigation, an agent that achieves a $52\%$ success rate is raised to $86\%$ with $13\%$ help and for rearrangement, the state-of-the-art model with a $7\%$ success rate is dramatically improved to $90.4\%$ using $39\%$ help. Human trials with Ask4Help demonstrate the efficacy of our approach in practical scenarios. We release the code for Ask4Help here: https://github.com/allenai/ask4help.
Retrospectives on the Embodied AI Workshop
Oct 17, 2022
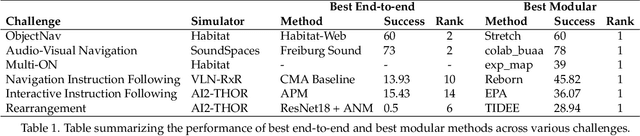
We present a retrospective on the state of Embodied AI research. Our analysis focuses on 13 challenges presented at the Embodied AI Workshop at CVPR. These challenges are grouped into three themes: (1) visual navigation, (2) rearrangement, and (3) embodied vision-and-language. We discuss the dominant datasets within each theme, evaluation metrics for the challenges, and the performance of state-of-the-art models. We highlight commonalities between top approaches to the challenges and identify potential future directions for Embodied AI research.