 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoxgraph: Globally Consistent, Volumetric Mapping using Signed Distance Function Submaps
Apr 27, 2020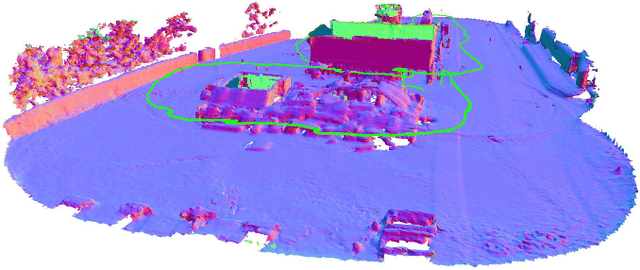
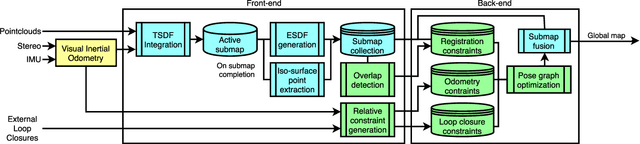
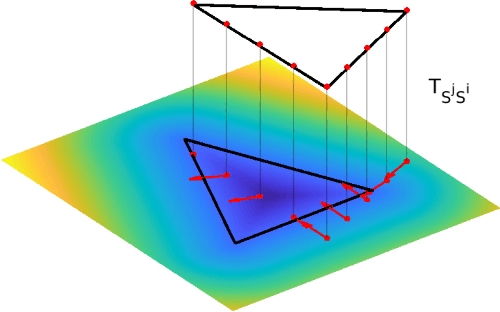
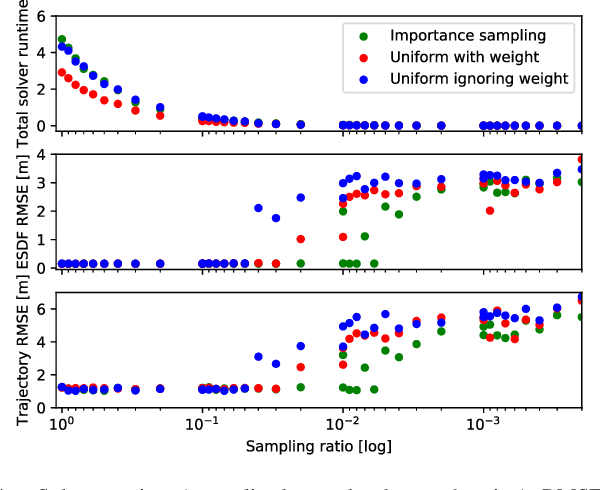
Globally consistent dense maps are a key requirement for long-term robot navigation in complex environments. While previous works have addressed the challenges of dense mapping and global consistency, most require more computational resources than may be available on-board small robots. We propose a framework that creates globally consistent volumetric maps on a CPU and is lightweight enough to run on computationally constrained platforms. Our approach represents the environment as a collection of overlapping Signed Distance Function (SDF) submaps, and maintains global consistency by computing an optimal alignment of the submap collection. By exploiting the underlying SDF representation, we generate correspondence free constraints between submap pairs that are computationally efficient enough to optimize the global problem each time a new submap is added. We deploy the proposed system on a hexacopter Micro Aerial Vehicle (MAV) with an Intel i7-8650U CPU in two realistic scenarios: mapping a large-scale area using a 3D LiDAR, and mapping an industrial space using an RGB-D camera. In the large-scale outdoor experiments, the system optimizes a 120x80m map in less than 4s and produces absolute trajectory RMSEs of less than 1m over 400m trajectories. Our complete system, called voxgraph, is available as open source.
* 8 pages, 9 figures
Go Fetch: Mobile Manipulation in Unstructured Environments
Apr 02, 2020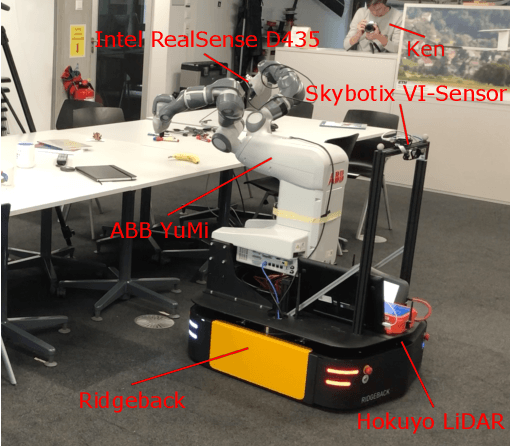
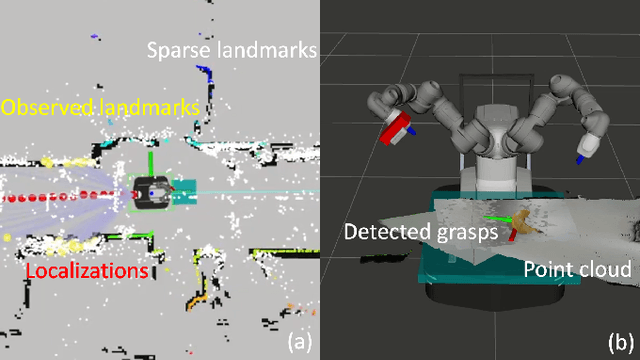
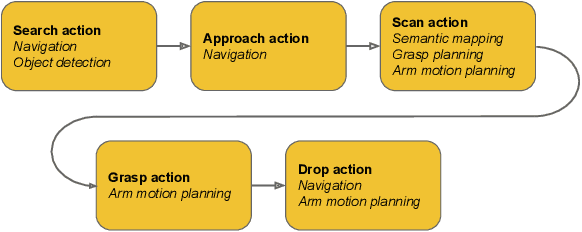
With humankind facing new and increasingly large-scale challenges in the medical and domestic spheres, automation of the service sector carries a tremendous potential for improved efficiency, quality, and safety of operations. Mobile robotics can offer solutions with a high degree of mobility and dexterity, however these complex systems require a multitude of heterogeneous components to be carefully integrated into one consistent framework. This work presents a mobile manipulation system that combines perception, localization, navigation, motion planning and grasping skills into one common workflow for fetch and carry applications in unstructured indoor environments. The tight integration across the various modules is experimentally demonstrated on the task of finding a commonly available object in an office environment, grasping it, and delivering it to a desired drop-off location. The accompanying video is available at https://youtu.be/e89_Xg1sLnY.
Active Interaction Force Control for Omnidirectional Aerial Contact-Based Inspection
Apr 01, 2020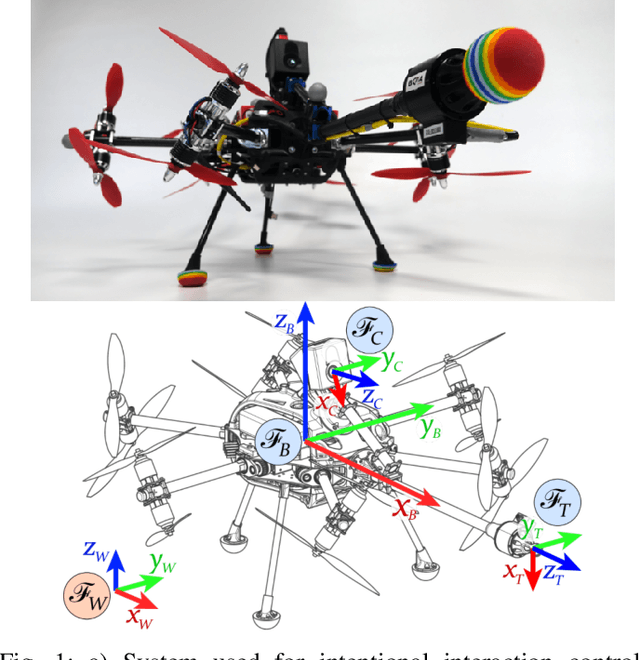
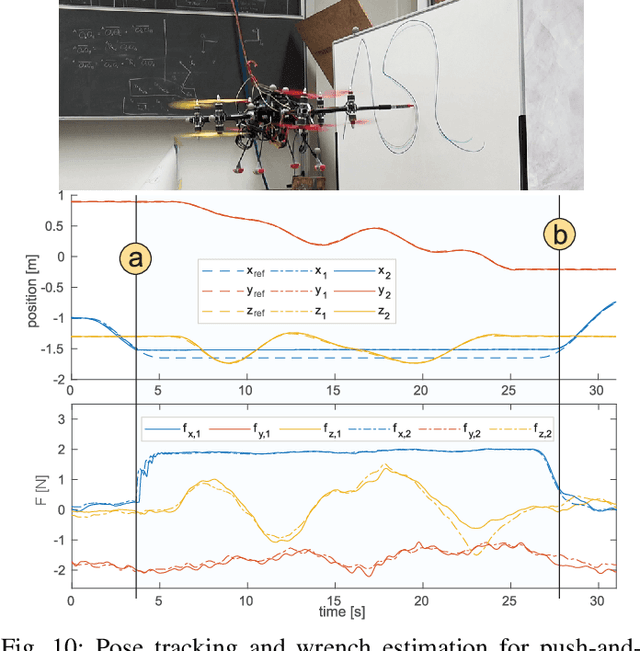
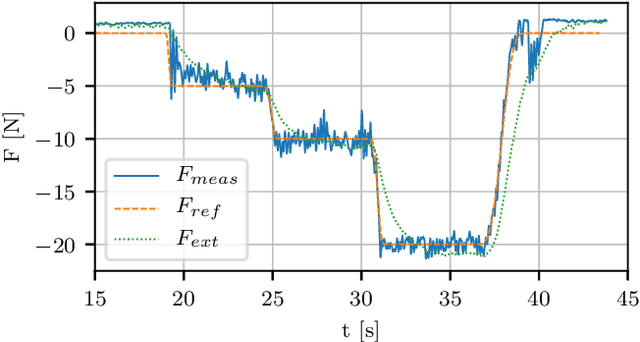
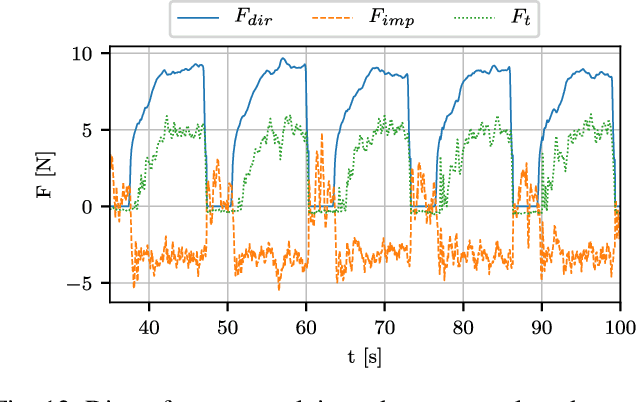
This paper presents and validates two approaches for active interaction force control and planning for omnidirectional aerial manipulation platforms, with the goal of aerial contact inspection in unstructured environments. We extend upon an axis-selective impedance controller to present a variable axis-selective impedance control which integrates direct force control for intentional interaction, using feedback from an on-board force sensor. The control approaches aim to reject disturbances in free flight, while handling unintentional interaction, and actively controlling desired interaction forces. A fully actuated and omnidirectional tilt-rotor aerial system is used to show capabilities of the control and planning methods. Experiments demonstrate disturbance rejection, push-and-slide interaction, and force controlled interaction in different flight orientations. The system is validated as a tool for non-destructive testing of concrete infrastructure, and statistical results of interaction control performance are presented and discussed.
OneShot Global Localization: Instant LiDAR-Visual Pose Estimation
Mar 31, 2020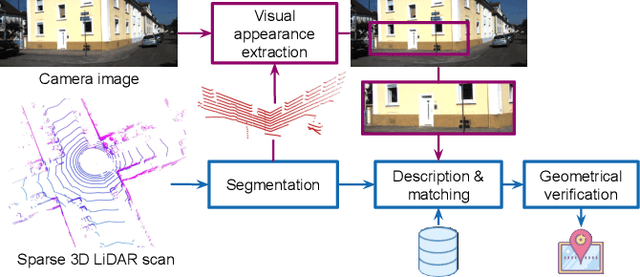
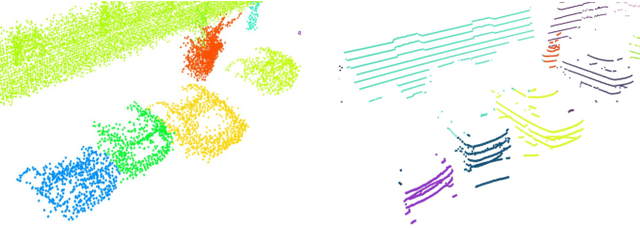
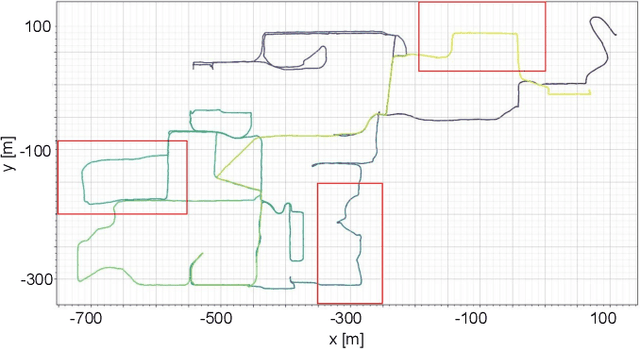
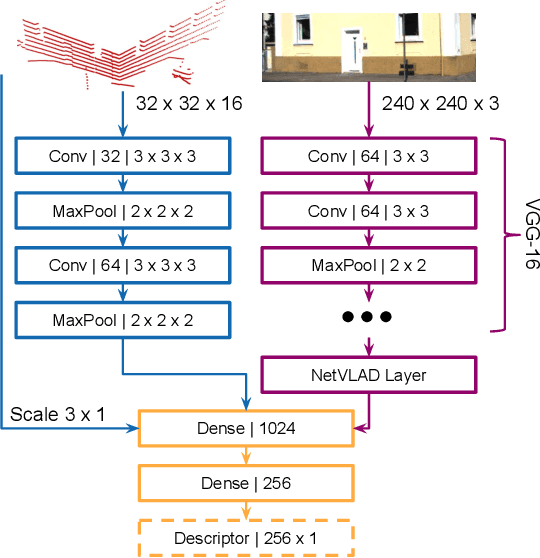
Globally localizing in a given map is a crucial ability for robots to perform a wide range of autonomous navigation tasks. This paper presents OneShot - a global localization algorithm that uses only a single 3D LiDAR scan at a time, while outperforming approaches based on integrating a sequence of point clouds. Our approach, which does not require the robot to move, relies on learning-based descriptors of point cloud segments and computes the full 6 degree-of-freedom pose in a map. The segments are extracted from the current LiDAR scan and are matched against a database using the computed descriptors. Candidate matches are then verified with a geometric consistency test. We additionally present a strategy to further improve the performance of the segment descriptors by augmenting them with visual information provided by a camera. For this purpose, a custom-tailored neural network architecture is proposed. We demonstrate that our LiDAR-only approach outperforms a state-of-the-art baseline on a sequence of the KITTI dataset and also evaluate its performance on the challenging NCLT dataset. Finally, we show that fusing in visual information boosts segment retrieval rates by up to 26% compared to LiDAR-only description.
Design and optimal control of a tiltrotor micro aerial vehicle for efficient omnidirectional flight
Mar 20, 2020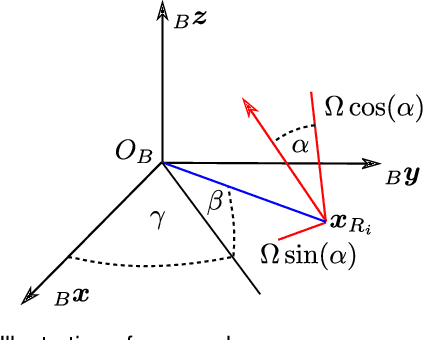
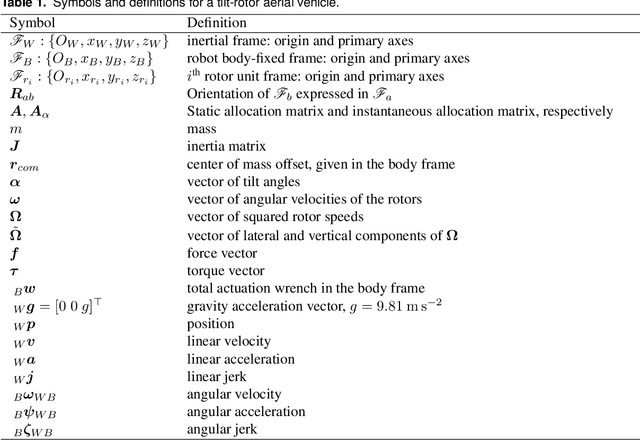
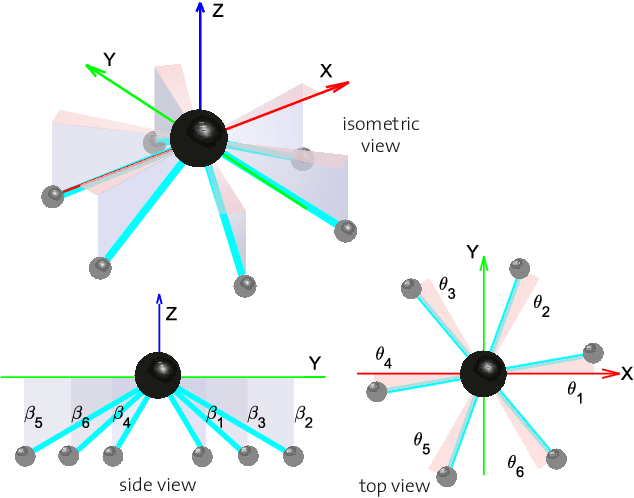
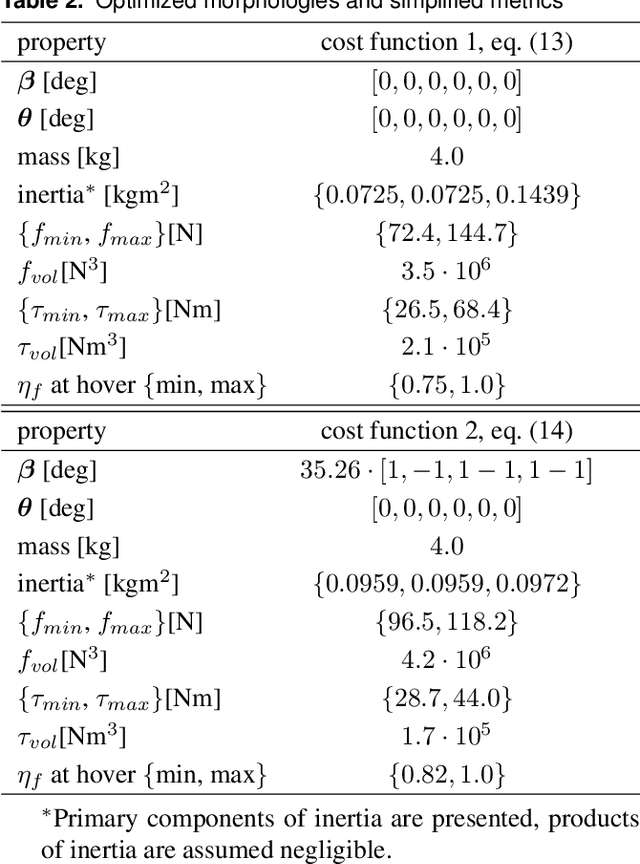
Omnidirectional micro aerial vehicles are a growing field of research, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents the design and optimal control of a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is motivated by the result of a morphology design optimization. A six degrees of freedom optimal controller is derived, with an actuator allocation approach that implements task prioritization, and is robust to singularities. Flight experiments demonstrate and verify the system's capabilities.
End-to-End Velocity Estimation For Autonomous Racing
Mar 15, 2020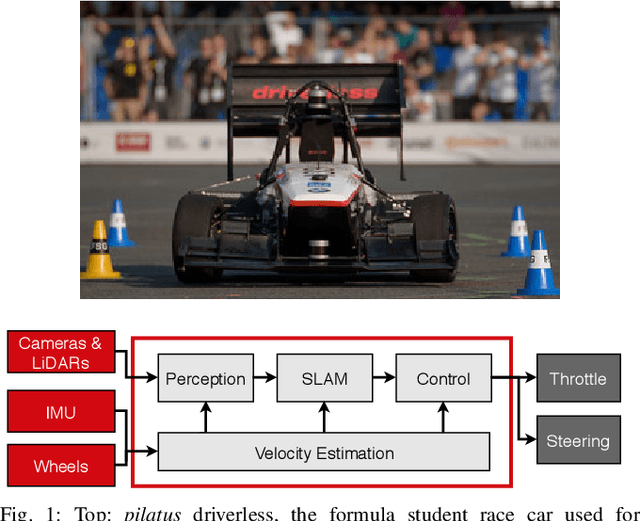
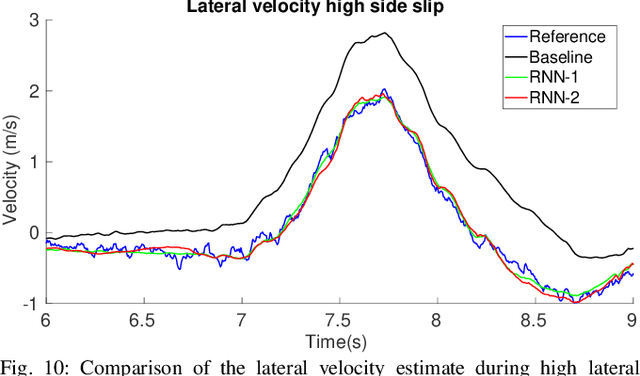
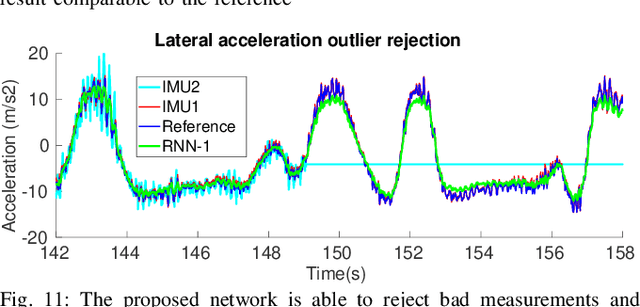
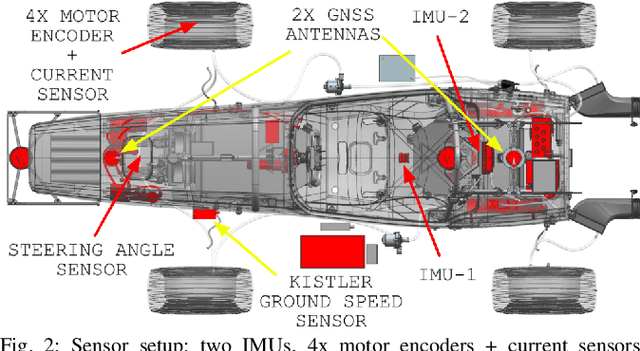
Velocity estimation plays a central role in driverless vehicles, but standard and affordable methods struggle to cope with extreme scenarios like aggressive maneuvers due to the presence of high sideslip. To solve this, autonomous race cars are usually equipped with expensive external velocity sensors. In this paper, we present an end-to-end recurrent neural network that takes available raw sensors as input (IMU, wheel odometry, and motor currents) and outputs velocity estimates. The results are compared to two state-of-the-art Kalman filters, which respectively include and exclude expensive velocity sensors. All methods have been extensively tested on a formula student driverless race car with very high sideslip (10{\deg} at the rear axle) and slip ratio (~20%), operating close to the limits of handling. The proposed network is able to estimate lateral velocity up to 15x better than the Kalman filter with the equivalent sensor input and matches (0.06 m/s RMSE) the Kalman filter with the expensive velocity sensor setup.
Fast and Accurate Mapping for Autonomous Racing
Mar 12, 2020
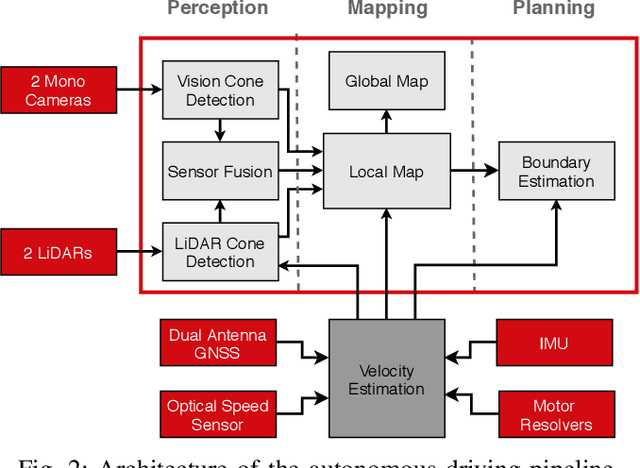
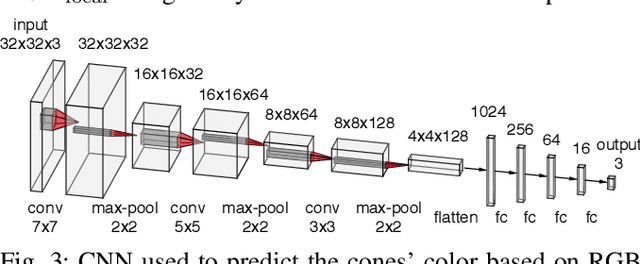
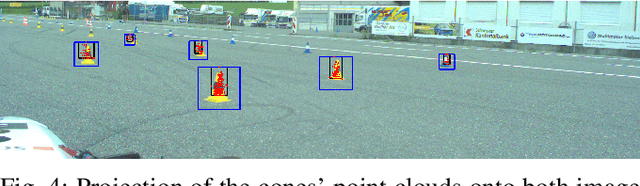
This paper presents the perception, mapping, and planning pipeline implemented on an autonomous race car. It was developed by the 2019 AMZ driverless team for the Formula Student Germany (FSG) 2019 driverless competition, where it won 1st place overall. The presented solution combines early fusion of camera and LiDAR data, a layered mapping approach, and a planning approach that uses Bayesian filtering to achieve high-speed driving on unknown race tracks while creating accurate maps. We benchmark the method against our team's previous solution, which won FSG 2018, and show improved accuracy when driving at the same speeds. Furthermore, the new pipeline makes it possible to reliably raise the maximum driving speed in unknown environments from 3~m/s to 12~m/s while still mapping with an acceptable RMSE of 0.29~m.
MOZARD: Multi-Modal Localization for Autonomous Vehicles in Urban Outdoor Environments
Mar 03, 2020
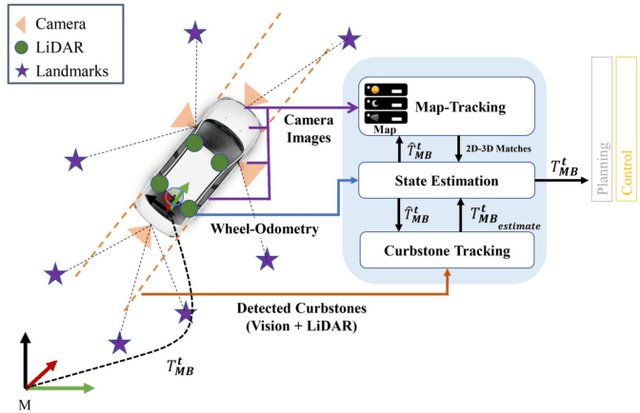
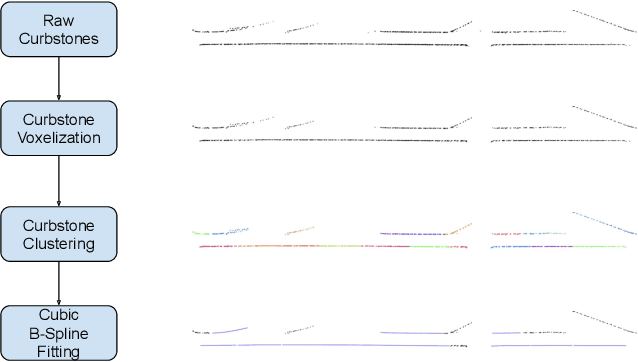

Visually poor scenarios are one of the main sources of failure in visual localization systems in outdoor environments. To address this challenge, we present MOZARD, a multi-modal localization system for urban outdoor environments using vision and LiDAR. By extending our preexisting key-point based visual multi-session local localization approach with the use of semantic data, an improved localization recall can be achieved across vastly different appearance conditions. In particular we focus on the use of curbstone information because of their broad distribution and reliability within urban environments. We present thorough experimental evaluations on several driving kilometers in challenging urban outdoor environments, analyze the recall and accuracy of our localization system and demonstrate in a case study possible failure cases of each subsystem. We demonstrate that MOZARD is able to bridge scenarios where our previous work VIZARD fails, hence yielding an increased recall performance, while a similar localization accuracy of 0.2m is achieved
Whole-Body Control of a Mobile Manipulator using End-to-End Reinforcement Learning
Feb 25, 2020
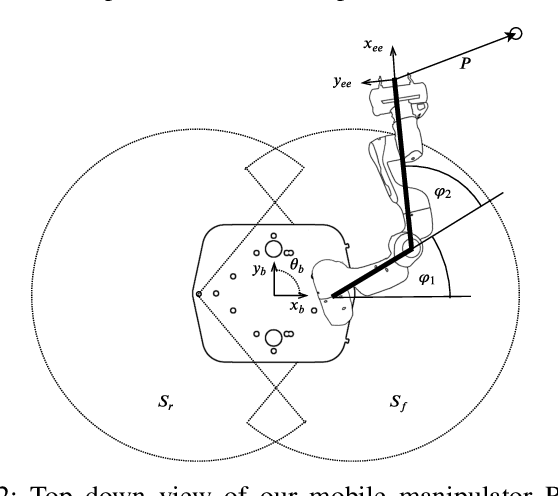
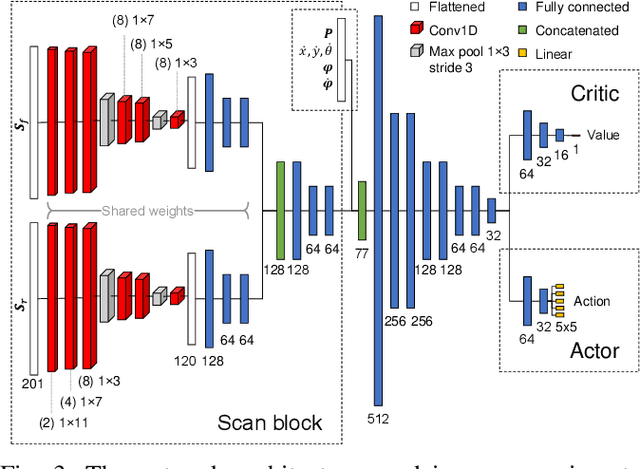
Mobile manipulation is usually achieved by sequentially executing base and manipulator movements. This simplification, however, leads to a loss in efficiency and in some cases a reduction of workspace size. Even though different methods have been proposed to solve Whole-Body Control (WBC) online, they are either limited by a kinematic model or do not allow for reactive, online obstacle avoidance. In order to overcome these drawbacks, in this work, we propose an end-to-end Reinforcement Learning (RL) approach to WBC. We compared our learned controller against a state-of-the-art sampling-based method in simulation and achieved faster overall mission times. In addition, we validated the learned policy on our mobile manipulator RoyalPanda in challenging narrow corridor environments.
Depth Based Semantic Scene Completion with Position Importance Aware Loss
Jan 30, 2020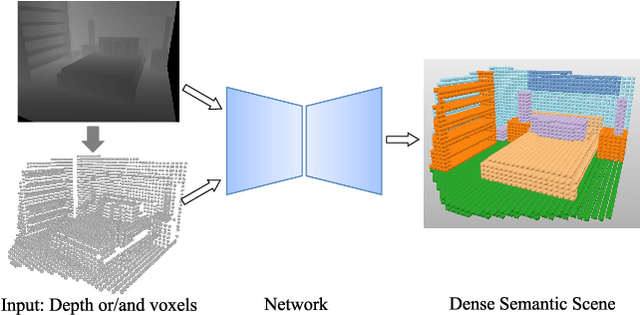
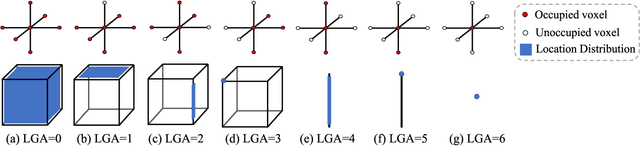
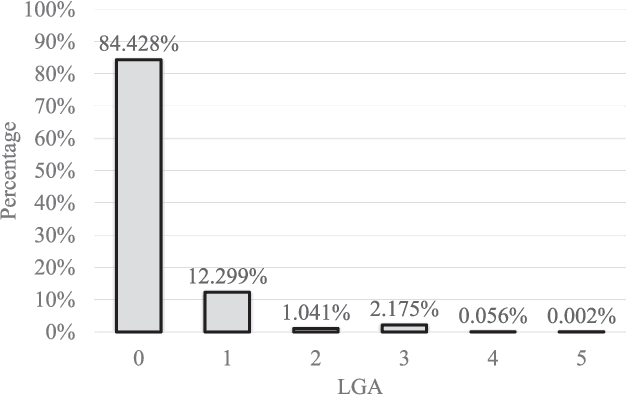
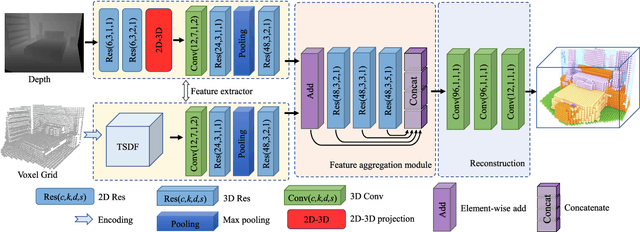
Semantic Scene Completion (SSC) refers to the task of inferring the 3D semantic segmentation of a scene while simultaneously completing the 3D shapes. We propose PALNet, a novel hybrid network for SSC based on single depth. PALNet utilizes a two-stream network to extract both 2D and 3D features from multi-stages using fine-grained depth information to efficiently captures the context, as well as the geometric cues of the scene. Current methods for SSC treat all parts of the scene equally causing unnecessary attention to the interior of objects. To address this problem, we propose Position Aware Loss(PA-Loss) which is position importance aware while training the network. Specifically, PA-Loss considers Local Geometric Anisotropy to determine the importance of different positions within the scene. It is beneficial for recovering key details like the boundaries of objects and the corners of the scene. Comprehensive experiments on two benchmark datasets demonstrate the effectiveness of the proposed method and its superior performance. Models and Video demo can be found at: https://github.com/UniLauX/PALNet.