 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
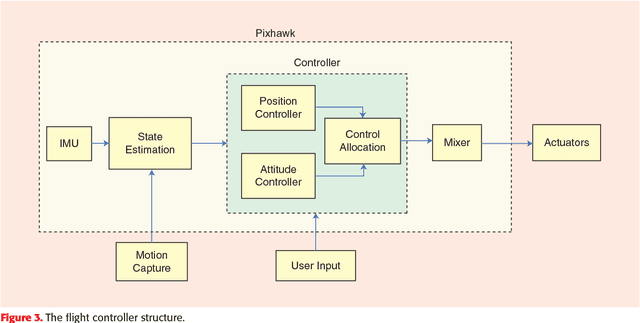
Add to EdgeDesign and optimal control of a tiltrotor micro aerial vehicle for efficient omnidirectional flight
Mar 20, 2020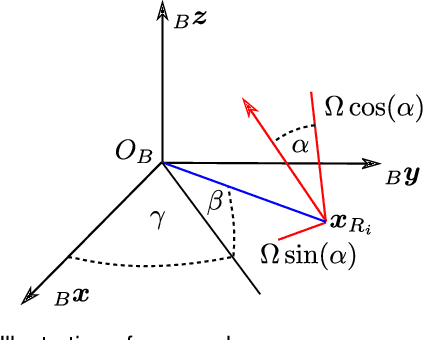
Omnidirectional micro aerial vehicles are a growing field of research, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents the design and optimal control of a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is motivated by the result of a morphology design optimization. A six degrees of freedom optimal controller is derived, with an actuator allocation approach that implements task prioritization, and is robust to singularities. Flight experiments demonstrate and verify the system's capabilities.
A Complete System for Vision-Based Micro-Aerial Vehicle Mapping, Planning, and Flight in Cluttered Environments
Dec 10, 2018
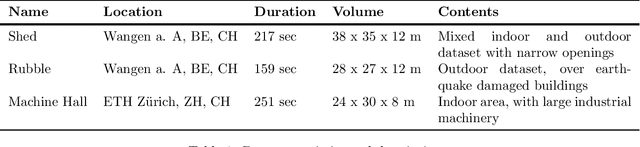
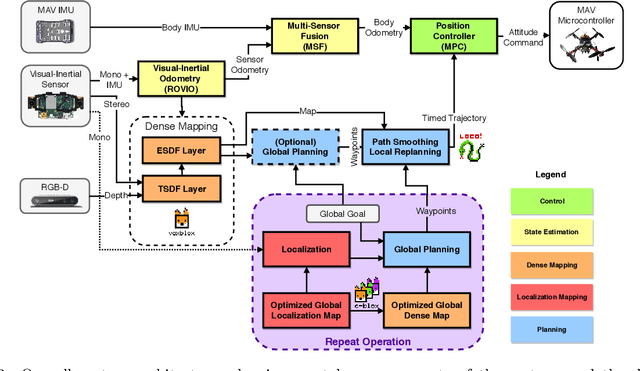
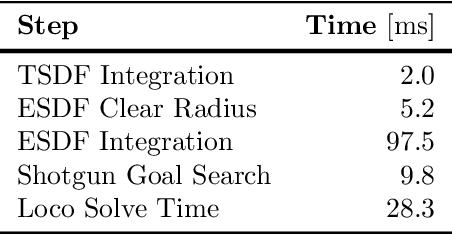
We present a complete system for micro-aerial vehicle autonomous navigation from vision-based sensing. We focus specifically on mapping using only on-board sensing and processing, and how this map information is best exploited for planning, especially when using narrow field of view sensors in very cluttered environments. In addition, details about other necessary parts of the system and special considerations are presented. We compare multiple global planning and path smoothing methods on real maps made in realistic search and rescue and industrial inspection scenarios.
Towards Efficient Full Pose Omnidirectionality with Overactuated MAVs
Oct 15, 2018
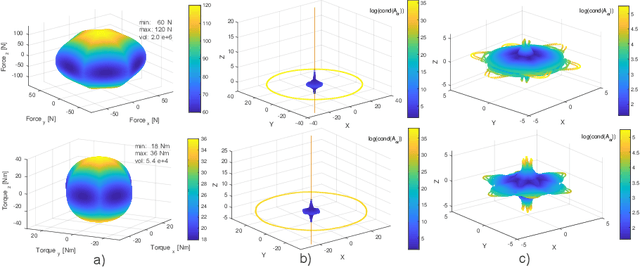
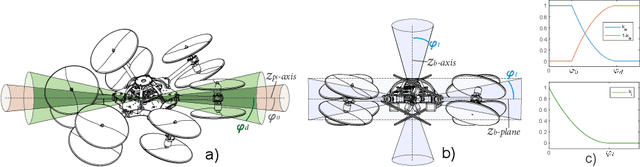
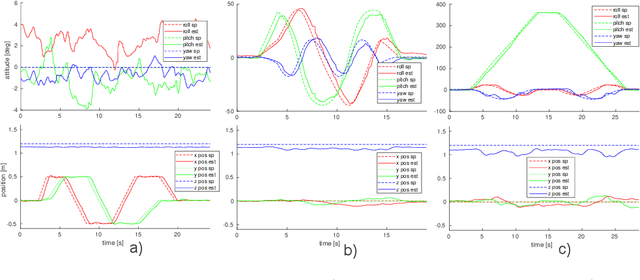
Omnidirectional MAVs are a growing field, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents VoliroX: a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is presented, and a 6 DOF geometric control that is robust to singularities. Flight experiments further demonstrate and verify its capabilities.
C-blox: A Scalable and Consistent TSDF-based Dense Mapping Approach
Sep 25, 2018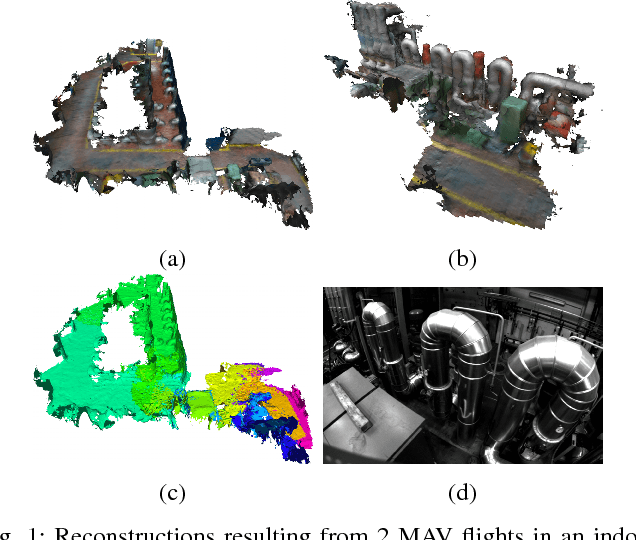
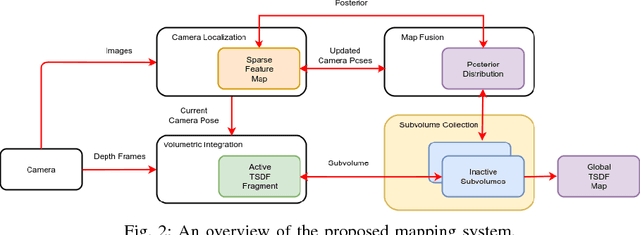
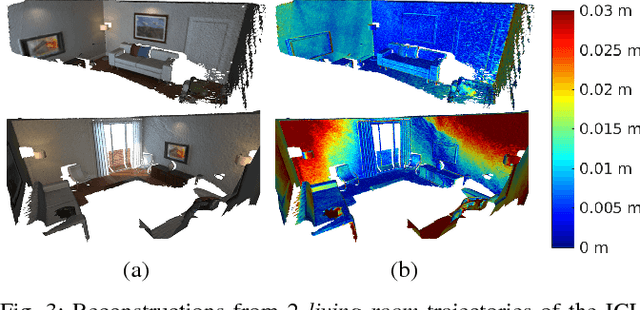
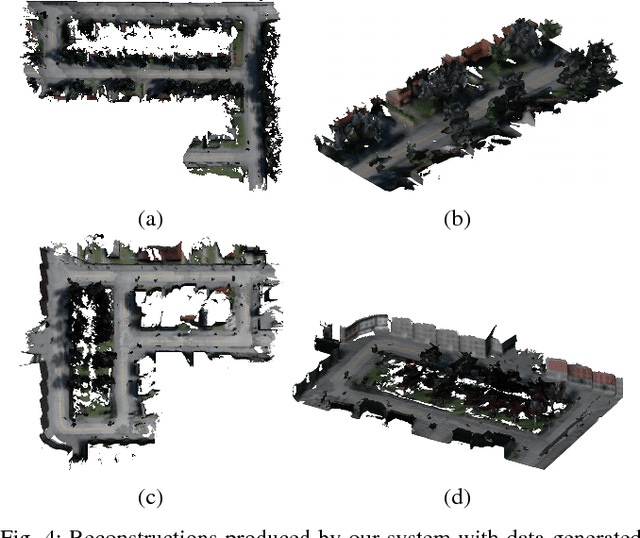
In many applications, maintaining a consistent dense map of the environment is key to enabling robotic platforms to perform higher level decision making. Several works have addressed the challenge of creating precise dense 3D maps from visual sensors providing depth information. However, during operation over longer missions, reconstructions can easily become inconsistent due to accumulated camera tracking error and delayed loop closure. Without explicitly addressing the problem of map consistency, recovery from such distortions tends to be difficult. We present a novel system for dense 3D mapping which addresses the challenge of building consistent maps while dealing with scalability. Central to our approach is the representation of the environment as a collection of overlapping TSDF subvolumes. These subvolumes are localized through feature-based camera tracking and bundle adjustment. Our main contribution is a pipeline for identifying stable regions in the map, and to fuse the contributing subvolumes. This approach allows us to reduce map growth while still maintaining consistency. We demonstrate the proposed system on a publicly available dataset and simulation engine, and demonstrate the efficacy of the proposed approach for building consistent and scalable maps. Finally we demonstrate our approach running in real-time on-board a lightweight MAV.
Sparse 3D Topological Graphs for Micro-Aerial Vehicle Planning
Jul 24, 2018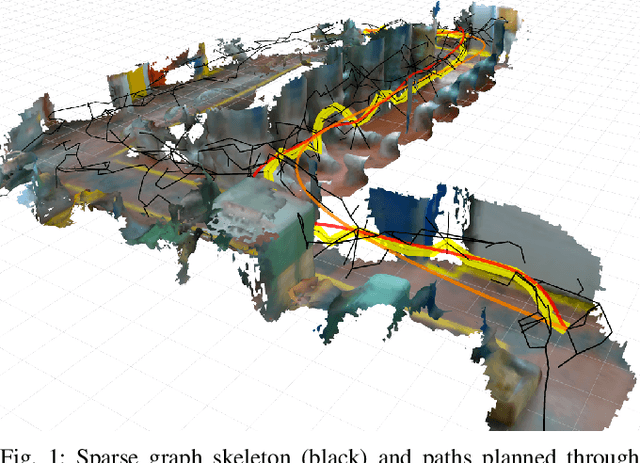
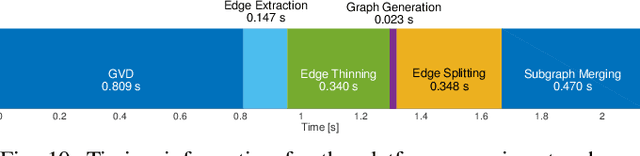
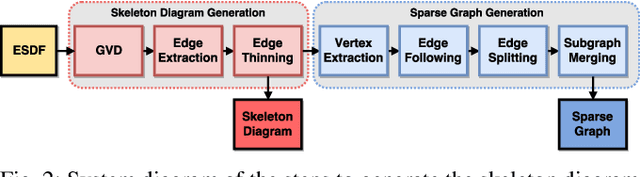
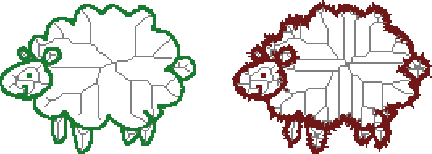
Micro-Aerial Vehicles (MAVs) have the advantage of moving freely in 3D space. However, creating compact and sparse map representations that can be efficiently used for planning for such robots is still an open problem. In this paper, we take maps built from noisy sensor data and construct a sparse graph containing topological information that can be used for 3D planning. We use a Euclidean Signed Distance Field, extract a 3D Generalized Voronoi Diagram (GVD), and obtain a thin skeleton diagram representing the topological structure of the environment. We then convert this skeleton diagram into a sparse graph, which we show is resistant to noise and changes in resolution. We demonstrate global planning over this graph, and the orders of magnitude speed-up it offers over other common planning methods. We validate our planning algorithm in real maps built onboard an MAV, using RGB-D sensing.
Safe Local Exploration for Replanning in Cluttered Unknown Environments for Micro-Aerial Vehicles
Mar 12, 2018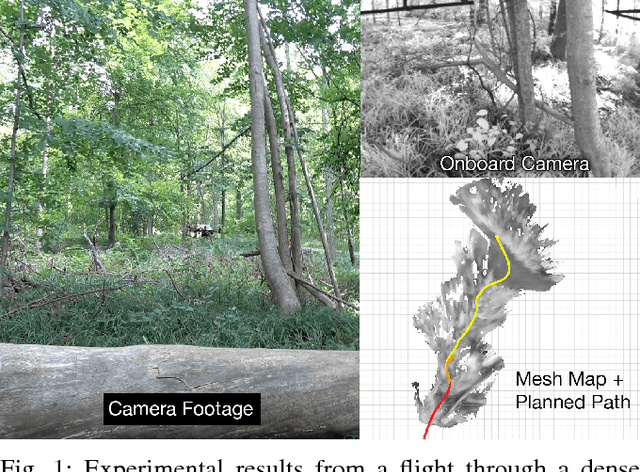
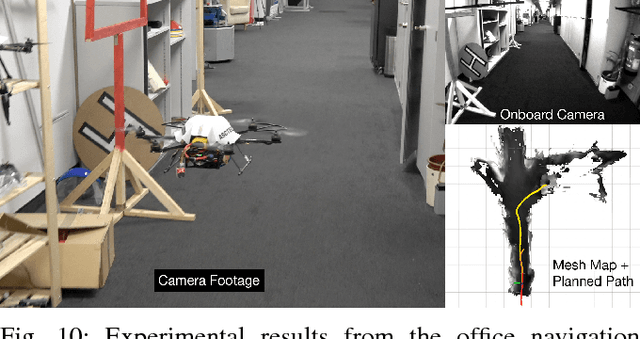
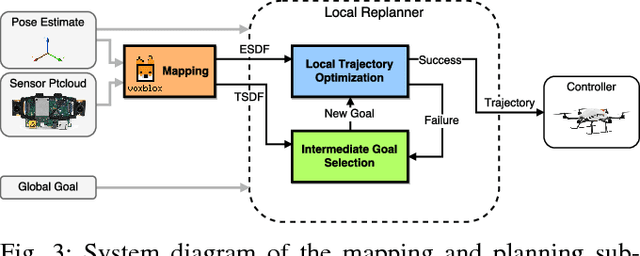
In order to enable Micro-Aerial Vehicles (MAVs) to assist in complex, unknown, unstructured environments, they must be able to navigate with guaranteed safety, even when faced with a cluttered environment they have no prior knowledge of. While trajectory optimization-based local planners have been shown to perform well in these cases, prior work either does not address how to deal with local minima in the optimization problem, or solves it by using an optimistic global planner. We present a conservative trajectory optimization-based local planner, coupled with a local exploration strategy that selects intermediate goals. We perform extensive simulations to show that this system performs better than the standard approach of using an optimistic global planner, and also outperforms doing a single exploration step when the local planner is stuck. The method is validated through experiments in a variety of highly cluttered environments including a dense forest. These experiments show the complete system running in real time fully onboard an MAV, mapping and replanning at 4 Hz.
Voliro: An Omnidirectional Hexacopter With Tiltable Rotors
Jan 14, 2018
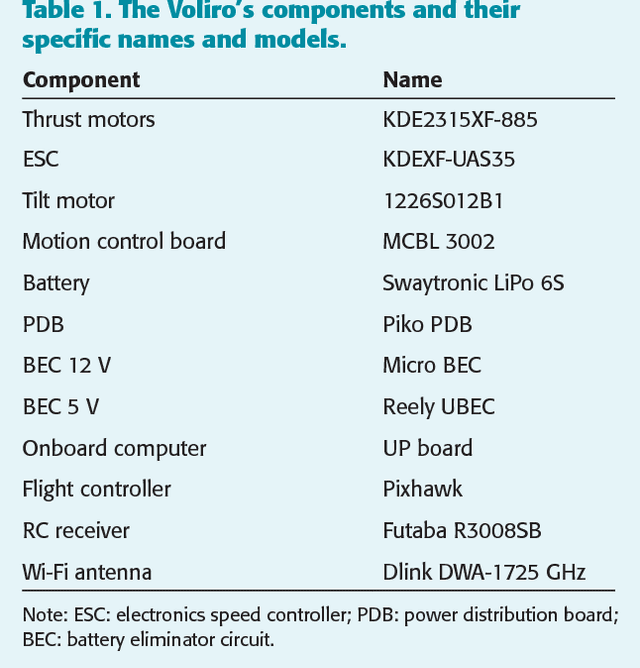
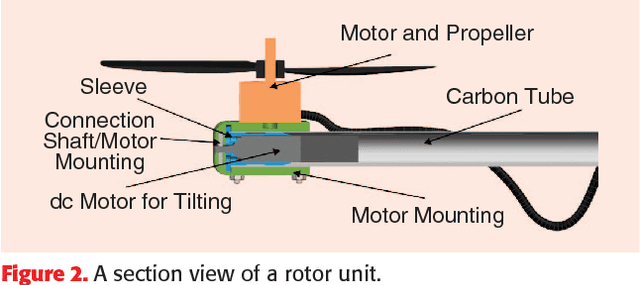
Extending the maneuverability of unmanned areal vehicles promises to yield a considerable increase in the areas in which these systems can be used. Some such applications are the performance of more complicated inspection tasks and the generation of complex uninterrupted movements of an attached camera. In this paper we address this challenge by presenting Voliro, a novel aerial platform that combines the advantages of existing multi-rotor systems with the agility of omnidirectionally controllable platforms. We propose the use of a hexacopter with tiltable rotors allowing the system to decouple the control of position and orientation. The contributions of this work involve the mechanical design as well as a controller with the corresponding allocation scheme. This work also discusses the design challenges involved when turning the concept of a hexacopter with tiltable rotors into an actual prototype. The agility of the system is demonstrated and evaluated in real- world experiments.
Voxblox: Incremental 3D Euclidean Signed Distance Fields for On-Board MAV Planning
Apr 21, 2017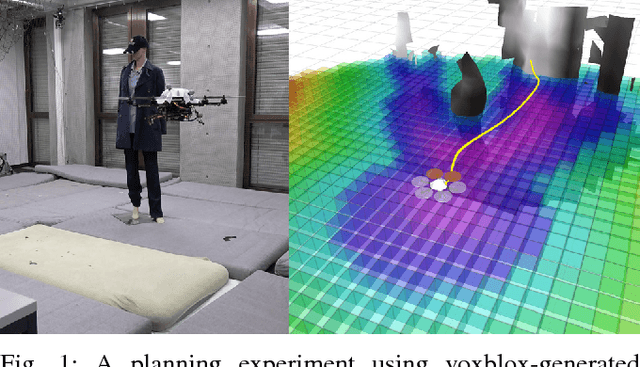
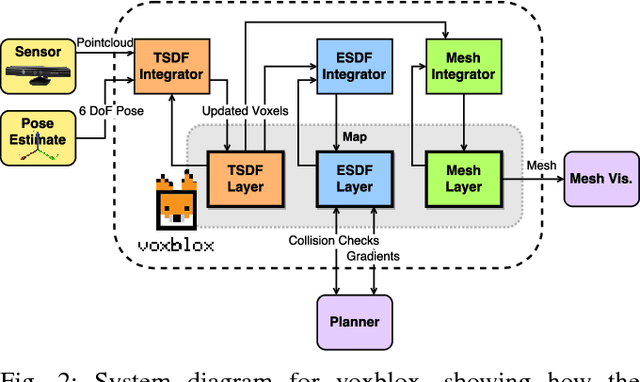
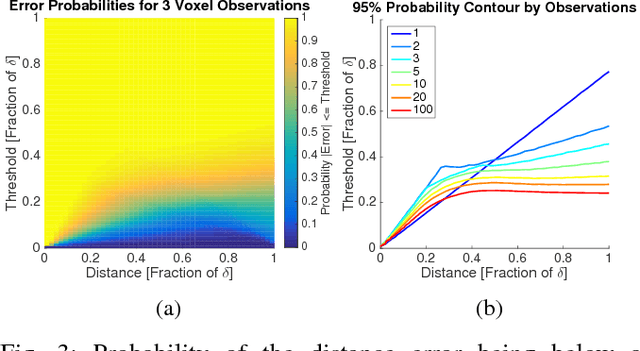
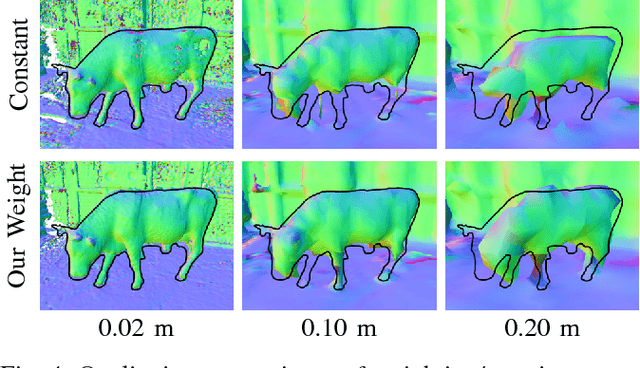
Micro Aerial Vehicles (MAVs) that operate in unstructured, unexplored environments require fast and flexible local planning, which can replan when new parts of the map are explored. Trajectory optimization methods fulfill these needs, but require obstacle distance information, which can be given by Euclidean Signed Distance Fields (ESDFs). We propose a method to incrementally build ESDFs from Truncated Signed Distance Fields (TSDFs), a common implicit surface representation used in computer graphics and vision. TSDFs are fast to build and smooth out sensor noise over many observations, and are designed to produce surface meshes. Meshes allow human operators to get a better assessment of the robot's environment, and set high-level mission goals. We show that we can build TSDFs faster than Octomaps, and that it is more accurate to build ESDFs out of TSDFs than occupancy maps. Our complete system, called voxblox, will be available as open source and runs in real-time on a single CPU core. We validate our approach on-board an MAV, by using our system with a trajectory optimization local planner, entirely on-board and in real-time.