 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Cases LJP Never Sees: Prosecution Decision Prediction for More Complete Criminal Liability Assessment
May 27, 2026Legal Judgment Prediction (LJP) has become a core benchmark for evaluating AI in the criminal legal domain, but it only sees criminal cases that have already passed prosecutorial review and been formally indicted. As a result, LJP leaves a substantial blind spot in assessing criminal liability, overlooking cases involving insufficient evidence, no criminal liability, or guilt exempted from punishment. To fill this gap, we propose \textbf{Prosecution Decision Prediction (PDP)}, the first Legal AI task built around prosecutorial review, which classifies each case into prosecution or one of three non-prosecution decisions and reflects legal AI's capabilities in evidence evaluation, legal subsumption, and value-based discretion. We further construct \textbf{PDP-Bench}, a benchmark of 4{,}630 real Chinese prosecutorial decisions spanning 190 charges. Extensive experiments show that state-of-the-art LLMs perform substantially worse on PDP than on LJP and that mainstream enhancement routes fail to close the gap. Moreover, controlled RLVR interventions show that simple outcome rewards fail to produce generalizable PDP discrimination.
Intern-S1-Pro: Scientific Multimodal Foundation Model at Trillion Scale
Mar 26, 2026We introduce Intern-S1-Pro, the first one-trillion-parameter scientific multimodal foundation model. Scaling to this unprecedented size, the model delivers a comprehensive enhancement across both general and scientific domains. Beyond stronger reasoning and image-text understanding capabilities, its intelligence is augmented with advanced agent capabilities. Simultaneously, its scientific expertise has been vastly expanded to master over 100 specialized tasks across critical science fields, including chemistry, materials, life sciences, and earth sciences. Achieving this massive scale is made possible by the robust infrastructure support of XTuner and LMDeploy, which facilitates highly efficient Reinforcement Learning (RL) training at the 1-trillion parameter level while ensuring strict precision consistency between training and inference. By seamlessly integrating these advancements, Intern-S1-Pro further fortifies the fusion of general and specialized intelligence, working as a Specializable Generalist, demonstrating its position in the top tier of open-source models for general capabilities, while outperforming proprietary models in the depth of specialized scientific tasks.
Variational Rectification Inference for Learning with Noisy Labels
Mar 18, 2026Label noise has been broadly observed in real-world datasets. To mitigate the negative impact of overfitting to label noise for deep models, effective strategies (\textit{e.g.}, re-weighting, or loss rectification) have been broadly applied in prevailing approaches, which have been generally learned under the meta-learning scenario. Despite the robustness of noise achieved by the probabilistic meta-learning models, they usually suffer from model collapse that degenerates generalization performance. In this paper, we propose variational rectification inference (VRI) to formulate the adaptive rectification for loss functions as an amortized variational inference problem and derive the evidence lower bound under the meta-learning framework. Specifically, VRI is constructed as a hierarchical Bayes by treating the rectifying vector as a latent variable, which can rectify the loss of the noisy sample with the extra randomness regularization and is, therefore, more robust to label noise. To achieve the inference of the rectifying vector, we approximate its conditional posterior with an amortization meta-network. By introducing the variational term in VRI, the conditional posterior is estimated accurately and avoids collapsing to a Dirac delta function, which can significantly improve the generalization performance. The elaborated meta-network and prior network adhere to the smoothness assumption, enabling the generation of reliable rectification vectors. Given a set of clean meta-data, VRI can be efficiently meta-learned within the bi-level optimization programming. Besides, theoretical analysis guarantees that the meta-network can be efficiently learned with our algorithm. Comprehensive comparison experiments and analyses validate its effectiveness for robust learning with noisy labels, particularly in the presence of open-set noise.
Reliable Reasoning in SVG-LLMs via Multi-Task Multi-Reward Reinforcement Learning
Mar 17, 2026With the rapid advancement of vision-language models, an increasing number of studies have explored their potential for SVG generation tasks. Although existing approaches improve performance by constructing large-scale SVG datasets and introducing SVG-specific tokens, they still suffer from limited generalization, redundant paths in code outputs, and a lack of explicit reasoning. In this work, we present CTRL-S (Chain-of-Thought Reinforcement Learning for SVG), a unified framework that introduces a chain-of-thought mechanism to explicitly expose the model's reasoning process during SVG generation. To support this structured reasoning, we construct SVG-Sophia, a high-quality dataset containing 145K samples across SVG code refinement, Text-to-SVG, and Image-to-SVG tasks. By training the model to generate group-level structured SVG code, CTRL-S significantly improves structural coherence and visual fidelity. Furthermore, we adopt the GRPO algorithm and design a multi-reward optimization framework, incorporating DINO, image-text similarity, format, and code efficiency rewards. Through joint multi-reward optimization and multi-task training, our approach systematically enhances overall generation capabilities. Extensive experiments show that CTRL-S outperforms existing methods, achieving higher task success rates, superior SVG code quality, and exceptional visual fidelity.
Featurized Occupation Measures for Structured Global Search in Numerical Optimal Control
Mar 17, 2026Numerical optimal control is commonly divided between globally structured but dimensionally intractable Hamilton-Jacobi-Bellman (HJB) methods and scalable but local trajectory optimization. We introduce the Featurized Occupation Measure (FOM), a finite-dimensional primal-dual interface for the occupation-measure formulation that unifies trajectory search and global HJB-type certification. FOM is broad yet numerically tractable, covering both explicit weak-form schemes and implicit simulator- or rollout-based sampling methods. Within this framework, approximate HJB subsolutions serve as intrinsic numerical certificates to directly evaluate and guide the primal search. We prove asymptotic consistency with the exact infinite-dimensional occupation-measure problem, and show that for block-organized feasible certificates, finite-dimensional approximation preserves certified lower bounds with blockwise error and complexity control. We also establish persistence of these lower bounds under time shifts and bounded model perturbations. Consequently, these structural properties render global certificates into flexible, reusable computational objects, establishing a systematic basis for certificate-guided optimization in nonlinear control.
Early-Terminable Energy-Safe Iterative Coupling for Parallel Simulation of Port-Hamiltonian Systems
Mar 17, 2026Parallel simulation and control of large-scale robotic systems often rely on partitioned time stepping, yet finite-iteration coupling can inject spurious energy by violating power consistency--even when each subsystem is passive. This letter proposes a novel energy-safe, early-terminable iterative coupling for port-Hamiltonian subsystems by embedding a Douglas--Rachford (DR) splitting scheme in scattering (wave) coordinates. The lossless interconnection is enforced as an orthogonal constraint in the wave domain, while each subsystem contributes a discrete-time scattering port map induced by its one-step integrator. Under a discrete passivity condition on the subsystem time steps and a mild impedance-tuning condition, we prove an augmented-storage inequality certifying discrete passivity of the coupled macro-step for any finite inner-iteration budget, with the remaining mismatch captured by an explicit residual. As the inner budget increases, the partitioned update converges to the monolithic discrete-time update induced by the same integrators, yielding a principled, adaptive accuracy--compute trade-off, supporting energy-consistent real-time parallel simulation under varying computational budgets. Experiments on a coupled-oscillator benchmark validate the passivity certificates at numerical roundoff (on the order of 10e-14 in double precision) and show that the reported RMS state error decays monotonically with increasing inner-iteration budgets, consistent with the hard-coupling limit.
InternVL-U: Democratizing Unified Multimodal Models for Understanding, Reasoning, Generation and Editing
Mar 10, 2026Unified multimodal models (UMMs) that integrate understanding, reasoning, generation, and editing face inherent trade-offs between maintaining strong semantic comprehension and acquiring powerful generation capabilities. In this report, we present InternVL-U, a lightweight 4B-parameter UMM that democratizes these capabilities within a unified framework. Guided by the principles of unified contextual modeling and modality-specific modular design with decoupled visual representations, InternVL-U integrates a state-of-the-art Multimodal Large Language Model (MLLM) with a specialized MMDiT-based visual generation head. To further bridge the gap between aesthetic generation and high-level intelligence, we construct a comprehensive data synthesis pipeline targeting high-semantic-density tasks, such as text rendering and scientific reasoning, under a reasoning-centric paradigm that leverages Chain-of-Thought (CoT) to better align abstract user intent with fine-grained visual generation details. Extensive experiments demonstrate that InternVL-U achieves a superior performance - efficiency balance. Despite using only 4B parameters, it consistently outperforms unified baseline models with over 3x larger scales such as BAGEL (14B) on various generation and editing tasks, while retaining strong multimodal understanding and reasoning capabilities.
Hierarchy-of-Groups Policy Optimization for Long-Horizon Agentic Tasks
Feb 26, 2026Group-based reinforcement learning (RL), such as GRPO, has advanced the capabilities of large language models on long-horizon agentic tasks. To enable more fine-grained policy updates, recent research has increasingly shifted toward stepwise group-based policy optimization, which treats each step in a rollout trajectory independently while using a memory module to retain historical context. However, we find a key issue in estimating stepwise relative advantages, namely context inconsistency, where steps within the same group may differ in their historical contexts. Empirically, we reveal that this issue can lead to severely biased advantage estimation, thereby degrading policy optimization significantly. To address the issue, in this paper, we propose Hierarchy-of-Groups Policy Optimization (HGPO) for long-horizon agentic tasks. Specifically, within a group of rollout trajectories, HGPO assigns each step to multiple hierarchical groups according to the consistency of historical contexts. Then, for each step, HGPO computes distinct advantages within each group and aggregates them with an adaptive weighting scheme. In this way, HGPO can achieve a favorable bias-variance trade-off in stepwise advantage estimation, without extra models or rollouts. Evaluations on two challenging agentic tasks, ALFWorld and WebShop with Qwen2.5-1.5B-Instruct and Qwen2.5-7B-Instruct, show that HGPO significantly outperforms existing agentic RL methods under the same computational constraints. Code is available at https://github.com/langfengQ/verl-agent/tree/master/recipe/hgpo.
Sparse Threats, Focused Defense: Criticality-Aware Robust Reinforcement Learning for Safe Autonomous Driving
Jan 05, 2026Reinforcement learning (RL) has shown considerable potential in autonomous driving (AD), yet its vulnerability to perturbations remains a critical barrier to real-world deployment. As a primary countermeasure, adversarial training improves policy robustness by training the AD agent in the presence of an adversary that deliberately introduces perturbations. Existing approaches typically model the interaction as a zero-sum game with continuous attacks. However, such designs overlook the inherent asymmetry between the agent and the adversary and then fail to reflect the sparsity of safety-critical risks, rendering the achieved robustness inadequate for practical AD scenarios. To address these limitations, we introduce criticality-aware robust RL (CARRL), a novel adversarial training approach for handling sparse, safety-critical risks in autonomous driving. CARRL consists of two interacting components: a risk exposure adversary (REA) and a risk-targeted robust agent (RTRA). We model the interaction between the REA and RTRA as a general-sum game, allowing the REA to focus on exposing safety-critical failures (e.g., collisions) while the RTRA learns to balance safety with driving efficiency. The REA employs a decoupled optimization mechanism to better identify and exploit sparse safety-critical moments under a constrained budget. However, such focused attacks inevitably result in a scarcity of adversarial data. The RTRA copes with this scarcity by jointly leveraging benign and adversarial experiences via a dual replay buffer and enforces policy consistency under perturbations to stabilize behavior. Experimental results demonstrate that our approach reduces the collision rate by at least 22.66\% across all cases compared to state-of-the-art baseline methods.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025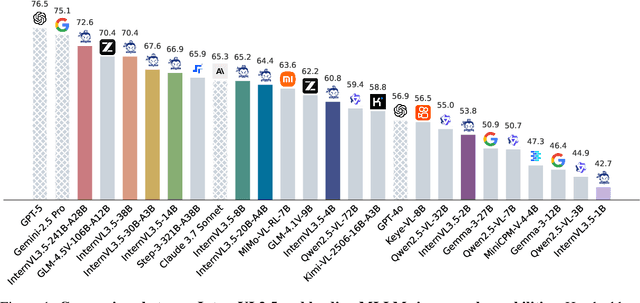
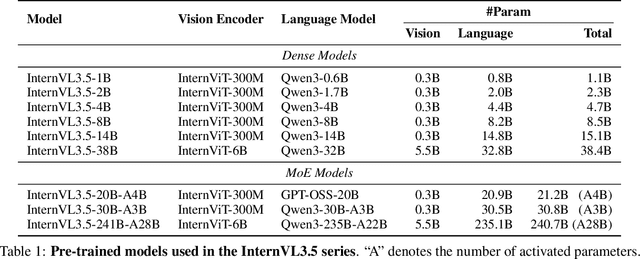
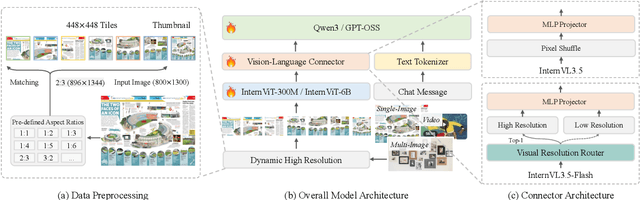
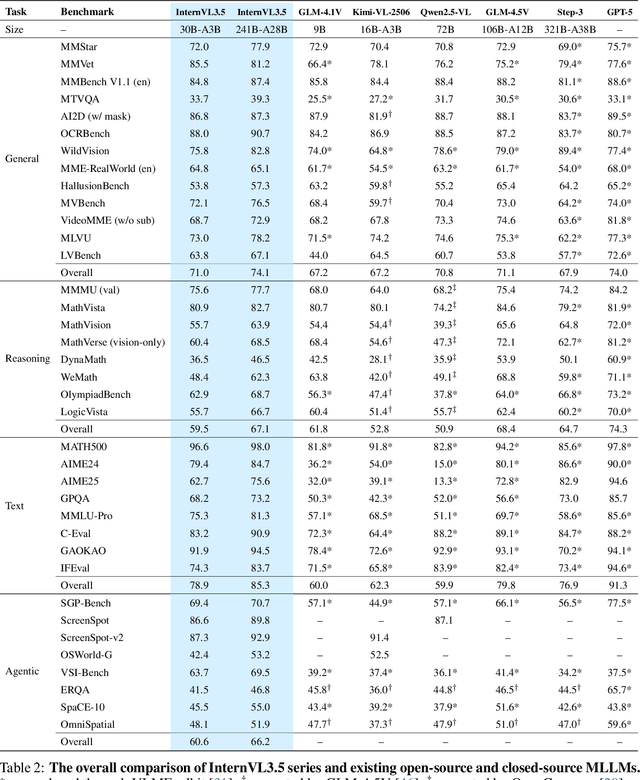
We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.