 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntern-S1-Pro: Scientific Multimodal Foundation Model at Trillion Scale
Mar 26, 2026We introduce Intern-S1-Pro, the first one-trillion-parameter scientific multimodal foundation model. Scaling to this unprecedented size, the model delivers a comprehensive enhancement across both general and scientific domains. Beyond stronger reasoning and image-text understanding capabilities, its intelligence is augmented with advanced agent capabilities. Simultaneously, its scientific expertise has been vastly expanded to master over 100 specialized tasks across critical science fields, including chemistry, materials, life sciences, and earth sciences. Achieving this massive scale is made possible by the robust infrastructure support of XTuner and LMDeploy, which facilitates highly efficient Reinforcement Learning (RL) training at the 1-trillion parameter level while ensuring strict precision consistency between training and inference. By seamlessly integrating these advancements, Intern-S1-Pro further fortifies the fusion of general and specialized intelligence, working as a Specializable Generalist, demonstrating its position in the top tier of open-source models for general capabilities, while outperforming proprietary models in the depth of specialized scientific tasks.
ScaleEdit-12M: Scaling Open-Source Image Editing Data Generation via Multi-Agent Framework
Mar 21, 2026Instruction-based image editing has emerged as a key capability for unified multimodal models (UMMs), yet constructing large-scale, diverse, and high-quality editing datasets without costly proprietary APIs remains challenging. Previous image editing datasets either rely on closed-source models for annotation, which prevents cost-effective scaling, or employ fixed synthetic editing pipelines, which suffer from limited quality and generalizability. To address these challenges, we propose ScaleEditor, a fully open-source hierarchical multi-agent framework for end-to-end construction of large-scale, high-quality image editing datasets. Our pipeline consists of three key components: source image expansion with world-knowledge infusion, adaptive multi-agent editing instruction-image synthesis, and a task-aware data quality verification mechanism. Using ScaleEditor, we curate ScaleEdit-12M, the largest open-source image editing dataset to date, spanning 23 task families across diverse real and synthetic domains. Fine-tuning UniWorld-V1 and Bagel on ScaleEdit yields consistent gains, improving performance by up to 10.4% on ImgEdit and 35.1% on GEdit for general editing benchmarks and by up to 150.0% on RISE and 26.5% on KRIS-Bench for knowledge-infused benchmarks. These results demonstrate that open-source, agentic pipelines can approach commercial-grade data quality while retaining cost-effectiveness and scalability. Both the framework and dataset will be open-sourced.
InternVL-U: Democratizing Unified Multimodal Models for Understanding, Reasoning, Generation and Editing
Mar 10, 2026Unified multimodal models (UMMs) that integrate understanding, reasoning, generation, and editing face inherent trade-offs between maintaining strong semantic comprehension and acquiring powerful generation capabilities. In this report, we present InternVL-U, a lightweight 4B-parameter UMM that democratizes these capabilities within a unified framework. Guided by the principles of unified contextual modeling and modality-specific modular design with decoupled visual representations, InternVL-U integrates a state-of-the-art Multimodal Large Language Model (MLLM) with a specialized MMDiT-based visual generation head. To further bridge the gap between aesthetic generation and high-level intelligence, we construct a comprehensive data synthesis pipeline targeting high-semantic-density tasks, such as text rendering and scientific reasoning, under a reasoning-centric paradigm that leverages Chain-of-Thought (CoT) to better align abstract user intent with fine-grained visual generation details. Extensive experiments demonstrate that InternVL-U achieves a superior performance - efficiency balance. Despite using only 4B parameters, it consistently outperforms unified baseline models with over 3x larger scales such as BAGEL (14B) on various generation and editing tasks, while retaining strong multimodal understanding and reasoning capabilities.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025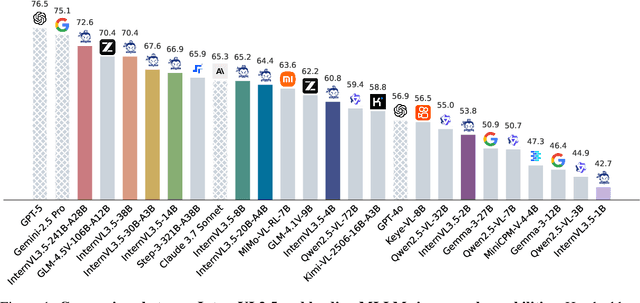
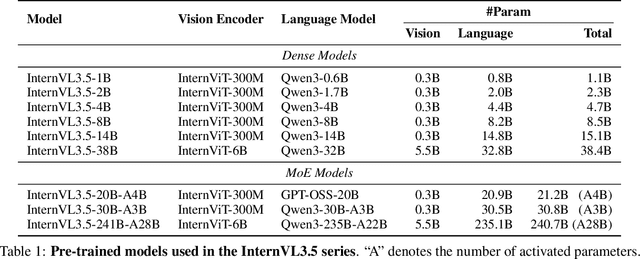
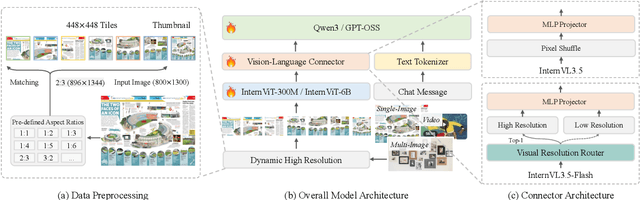
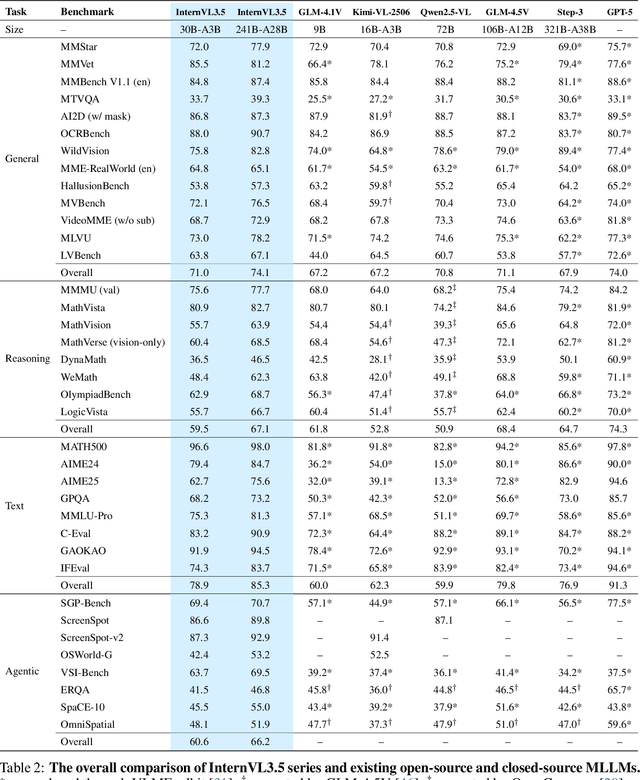
We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
Consensus Entropy: Harnessing Multi-VLM Agreement for Self-Verifying and Self-Improving OCR
Apr 16, 2025



The Optical Character Recognition (OCR) task is important for evaluating Vision-Language Models (VLMs) and providing high-quality data sources for LLM training data. While state-of-the-art VLMs show improved average OCR accuracy, they still struggle with sample-level quality degradation and lack reliable automatic detection of low-quality outputs. We introduce Consensus Entropy (CE), a training-free post-inference method that quantifies OCR uncertainty by aggregating outputs from multiple VLMs. Our approach exploits a key insight: correct VLM OCR predictions converge in output space while errors diverge. We develop a lightweight multi-model framework that effectively identifies problematic samples, selects the best outputs and combines model strengths. Experiments across multiple OCR benchmarks and VLMs demonstrate that CE outperforms VLM-as-judge approaches and single-model baselines at the same cost and achieves state-of-the-art results across multiple metrics. For instance, our solution demonstrates: achieving 15.2% higher F1 scores than VLM-as-judge methods in quality verification, delivering 6.0% accuracy gains on mathematical calculation tasks, and requiring rephrasing only 7.3% of inputs while maintaining overall performance. Notably, the entire process requires neither training nor supervision while maintaining plug-and-play functionality throughout.
InternVL3: Exploring Advanced Training and Test-Time Recipes for Open-Source Multimodal Models
Apr 15, 2025We introduce InternVL3, a significant advancement in the InternVL series featuring a native multimodal pre-training paradigm. Rather than adapting a text-only large language model (LLM) into a multimodal large language model (MLLM) that supports visual inputs, InternVL3 jointly acquires multimodal and linguistic capabilities from both diverse multimodal data and pure-text corpora during a single pre-training stage. This unified training paradigm effectively addresses the complexities and alignment challenges commonly encountered in conventional post-hoc training pipelines for MLLMs. To further improve performance and scalability, InternVL3 incorporates variable visual position encoding (V2PE) to support extended multimodal contexts, employs advanced post-training techniques such as supervised fine-tuning (SFT) and mixed preference optimization (MPO), and adopts test-time scaling strategies alongside an optimized training infrastructure. Extensive empirical evaluations demonstrate that InternVL3 delivers superior performance across a wide range of multi-modal tasks. In particular, InternVL3-78B achieves a score of 72.2 on the MMMU benchmark, setting a new state-of-the-art among open-source MLLMs. Its capabilities remain highly competitive with leading proprietary models, including ChatGPT-4o, Claude 3.5 Sonnet, and Gemini 2.5 Pro, while also maintaining strong pure-language proficiency. In pursuit of open-science principles, we will publicly release both the training data and model weights to foster further research and development in next-generation MLLMs.
Expanding Performance Boundaries of Open-Source Multimodal Models with Model, Data, and Test-Time Scaling
Dec 06, 2024



We introduce InternVL 2.5, an advanced multimodal large language model (MLLM) series that builds upon InternVL 2.0, maintaining its core model architecture while introducing significant enhancements in training and testing strategies as well as data quality. In this work, we delve into the relationship between model scaling and performance, systematically exploring the performance trends in vision encoders, language models, dataset sizes, and test-time configurations. Through extensive evaluations on a wide range of benchmarks, including multi-discipline reasoning, document understanding, multi-image / video understanding, real-world comprehension, multimodal hallucination detection, visual grounding, multilingual capabilities, and pure language processing, InternVL 2.5 exhibits competitive performance, rivaling leading commercial models such as GPT-4o and Claude-3.5-Sonnet. Notably, our model is the first open-source MLLMs to surpass 70% on the MMMU benchmark, achieving a 3.7-point improvement through Chain-of-Thought (CoT) reasoning and showcasing strong potential for test-time scaling. We hope this model contributes to the open-source community by setting new standards for developing and applying multimodal AI systems. HuggingFace demo see https://huggingface.co/spaces/OpenGVLab/InternVL
Mini-InternVL: A Flexible-Transfer Pocket Multimodal Model with 5% Parameters and 90% Performance
Oct 21, 2024



Multimodal large language models (MLLMs) have demonstrated impressive performance in vision-language tasks across a broad spectrum of domains. However, the large model scale and associated high computational costs pose significant challenges for training and deploying MLLMs on consumer-grade GPUs or edge devices, thereby hindering their widespread application. In this work, we introduce Mini-InternVL, a series of MLLMs with parameters ranging from 1B to 4B, which achieves 90% of the performance with only 5% of the parameters. This significant improvement in efficiency and effectiveness makes our models more accessible and applicable in various real-world scenarios. To further promote the adoption of our models, we develop a unified adaptation framework for Mini-InternVL, which enables our models to transfer and outperform specialized models in downstream tasks, including autonomous driving, medical images, and remote sensing. We believe that our study can provide valuable insights and resources to advance the development of efficient and effective MLLMs. Code is available at https://github.com/OpenGVLab/InternVL.
OmniCorpus: A Unified Multimodal Corpus of 10 Billion-Level Images Interleaved with Text
Jun 13, 2024



Image-text interleaved data, consisting of multiple images and texts arranged in a natural document format, aligns with the presentation paradigm of internet data and closely resembles human reading habits. Recent studies have shown that such data aids multimodal in-context learning and maintains the capabilities of large language models during multimodal fine-tuning. However, the limited scale and diversity of current image-text interleaved data restrict the development of multimodal large language models. In this paper, we introduce OmniCorpus, a 10 billion-scale image-text interleaved dataset. Using an efficient data engine, we filter and extract large-scale high-quality documents, which contain 8.6 billion images and 1,696 billion text tokens. Compared to counterparts (e.g., MMC4, OBELICS), our dataset 1) has 15 times larger scales while maintaining good data quality; 2) features more diverse sources, including both English and non-English websites as well as video-centric websites; 3) is more flexible, easily degradable from an image-text interleaved format to pure text corpus and image-text pairs. Through comprehensive analysis and experiments, we validate the quality, usability, and effectiveness of the proposed dataset. We hope this could provide a solid data foundation for future multimodal model research. Code and data are released at https://github.com/OpenGVLab/OmniCorpus.
OmniCorpus: An Unified Multimodal Corpus of 10 Billion-Level Images Interleaved with Text
Jun 12, 2024Image-text interleaved data, consisting of multiple images and texts arranged in a natural document format, aligns with the presentation paradigm of internet data and closely resembles human reading habits. Recent studies have shown that such data aids multimodal in-context learning and maintains the capabilities of large language models during multimodal fine-tuning. However, the limited scale and diversity of current image-text interleaved data restrict the development of multimodal large language models. In this paper, we introduce OmniCorpus, a 10 billion-scale image-text interleaved dataset. Using an efficient data engine, we filter and extract large-scale high-quality documents, which contain 8.6 billion images and 1,696 billion text tokens. Compared to counterparts (e.g., MMC4, OBELICS), our dataset 1) has 15 times larger scales while maintaining good data quality; 2) features more diverse sources, including both English and non-English websites as well as video-centric websites; 3) is more flexible, easily degradable from an image-text interleaved format to pure text corpus and image-text pairs. Through comprehensive analysis and experiments, we validate the quality, usability, and effectiveness of the proposed dataset. We hope this could provide a solid data foundation for future multimodal model research. Code and data are released at https://github.com/OpenGVLab/OmniCorpus.