 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntern-S1-Pro: Scientific Multimodal Foundation Model at Trillion Scale
Mar 26, 2026We introduce Intern-S1-Pro, the first one-trillion-parameter scientific multimodal foundation model. Scaling to this unprecedented size, the model delivers a comprehensive enhancement across both general and scientific domains. Beyond stronger reasoning and image-text understanding capabilities, its intelligence is augmented with advanced agent capabilities. Simultaneously, its scientific expertise has been vastly expanded to master over 100 specialized tasks across critical science fields, including chemistry, materials, life sciences, and earth sciences. Achieving this massive scale is made possible by the robust infrastructure support of XTuner and LMDeploy, which facilitates highly efficient Reinforcement Learning (RL) training at the 1-trillion parameter level while ensuring strict precision consistency between training and inference. By seamlessly integrating these advancements, Intern-S1-Pro further fortifies the fusion of general and specialized intelligence, working as a Specializable Generalist, demonstrating its position in the top tier of open-source models for general capabilities, while outperforming proprietary models in the depth of specialized scientific tasks.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025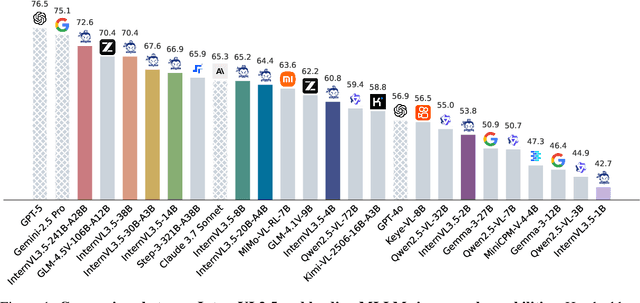
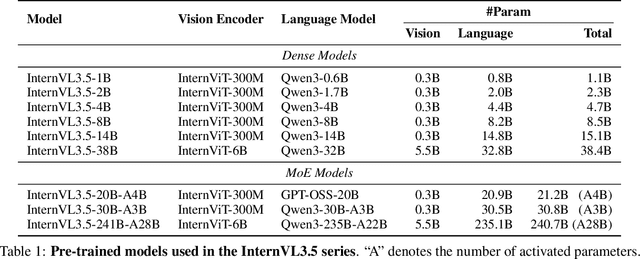
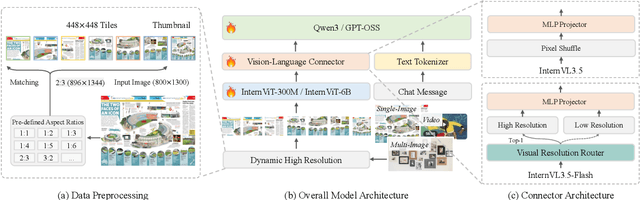
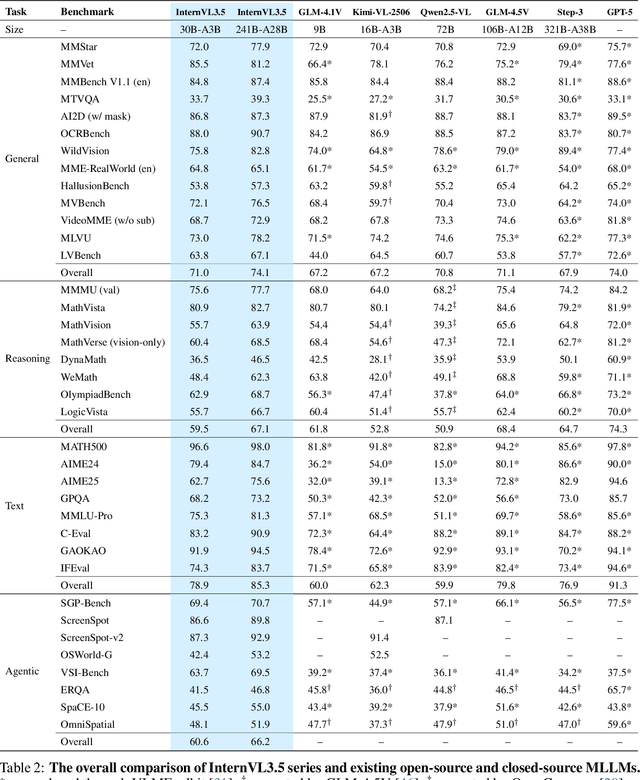
We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
EvoMoE: Expert Evolution in Mixture of Experts for Multimodal Large Language Models
May 28, 2025Recent advancements have shown that the Mixture of Experts (MoE) approach significantly enhances the capacity of large language models (LLMs) and improves performance on downstream tasks. Building on these promising results, multi-modal large language models (MLLMs) have increasingly adopted MoE techniques. However, existing multi-modal MoE tuning methods typically face two key challenges: expert uniformity and router rigidity. Expert uniformity occurs because MoE experts are often initialized by simply replicating the FFN parameters from LLMs, leading to homogenized expert functions and weakening the intended diversification of the MoE architecture. Meanwhile, router rigidity stems from the prevalent use of static linear routers for expert selection, which fail to distinguish between visual and textual tokens, resulting in similar expert distributions for image and text. To address these limitations, we propose EvoMoE, an innovative MoE tuning framework. EvoMoE introduces a meticulously designed expert initialization strategy that progressively evolves multiple robust experts from a single trainable expert, a process termed expert evolution that specifically targets severe expert homogenization. Furthermore, we introduce the Dynamic Token-aware Router (DTR), a novel routing mechanism that allocates input tokens to appropriate experts based on their modality and intrinsic token values. This dynamic routing is facilitated by hypernetworks, which dynamically generate routing weights tailored for each individual token. Extensive experiments demonstrate that EvoMoE significantly outperforms other sparse MLLMs across a variety of multi-modal benchmarks, including MME, MMBench, TextVQA, and POPE. Our results highlight the effectiveness of EvoMoE in enhancing the performance of MLLMs by addressing the critical issues of expert uniformity and router rigidity.
Aerial Vision-and-Language Navigation via Semantic-Topo-Metric Representation Guided LLM Reasoning
Oct 11, 2024



Aerial Vision-and-Language Navigation (VLN) is a novel task enabling Unmanned Aerial Vehicles (UAVs) to navigate in outdoor environments through natural language instructions and visual cues. It remains challenging due to the complex spatial relationships in outdoor aerial scenes. In this paper, we propose an end-to-end zero-shot framework for aerial VLN tasks, where the large language model (LLM) is introduced as our agent for action prediction. Specifically, we develop a novel Semantic-Topo-Metric Representation (STMR) to enhance the spatial reasoning ability of LLMs. This is achieved by extracting and projecting instruction-related semantic masks of landmarks into a top-down map that contains the location information of surrounding landmarks. Further, this map is transformed into a matrix representation with distance metrics as the text prompt to the LLM, for action prediction according to the instruction. Experiments conducted in real and simulation environments have successfully proved the effectiveness and robustness of our method, achieving 15.9% and 12.5% improvements (absolute) in Oracle Success Rate (OSR) on AerialVLN-S dataset.
HPL-ESS: Hybrid Pseudo-Labeling for Unsupervised Event-based Semantic Segmentation
Mar 25, 2024



Event-based semantic segmentation has gained popularity due to its capability to deal with scenarios under high-speed motion and extreme lighting conditions, which cannot be addressed by conventional RGB cameras. Since it is hard to annotate event data, previous approaches rely on event-to-image reconstruction to obtain pseudo labels for training. However, this will inevitably introduce noise, and learning from noisy pseudo labels, especially when generated from a single source, may reinforce the errors. This drawback is also called confirmation bias in pseudo-labeling. In this paper, we propose a novel hybrid pseudo-labeling framework for unsupervised event-based semantic segmentation, HPL-ESS, to alleviate the influence of noisy pseudo labels. In particular, we first employ a plain unsupervised domain adaptation framework as our baseline, which can generate a set of pseudo labels through self-training. Then, we incorporate offline event-to-image reconstruction into the framework, and obtain another set of pseudo labels by predicting segmentation maps on the reconstructed images. A noisy label learning strategy is designed to mix the two sets of pseudo labels and enhance the quality. Moreover, we propose a soft prototypical alignment module to further improve the consistency of target domain features. Extensive experiments show that our proposed method outperforms existing state-of-the-art methods by a large margin on the DSEC-Semantic dataset (+5.88% accuracy, +10.32% mIoU), which even surpasses several supervised methods.
X4D-SceneFormer: Enhanced Scene Understanding on 4D Point Cloud Videos through Cross-modal Knowledge Transfer
Dec 12, 2023The field of 4D point cloud understanding is rapidly developing with the goal of analyzing dynamic 3D point cloud sequences. However, it remains a challenging task due to the sparsity and lack of texture in point clouds. Moreover, the irregularity of point cloud poses a difficulty in aligning temporal information within video sequences. To address these issues, we propose a novel cross-modal knowledge transfer framework, called X4D-SceneFormer. This framework enhances 4D-Scene understanding by transferring texture priors from RGB sequences using a Transformer architecture with temporal relationship mining. Specifically, the framework is designed with a dual-branch architecture, consisting of an 4D point cloud transformer and a Gradient-aware Image Transformer (GIT). During training, we employ multiple knowledge transfer techniques, including temporal consistency losses and masked self-attention, to strengthen the knowledge transfer between modalities. This leads to enhanced performance during inference using single-modal 4D point cloud inputs. Extensive experiments demonstrate the superior performance of our framework on various 4D point cloud video understanding tasks, including action recognition, action segmentation and semantic segmentation. The results achieve 1st places, i.e., 85.3% (+7.9%) accuracy and 47.3% (+5.0%) mIoU for 4D action segmentation and semantic segmentation, on the HOI4D challenge\footnote{\url{http://www.hoi4d.top/}.}, outperforming previous state-of-the-art by a large margin. We release the code at https://github.com/jinglinglingling/X4D