 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointAction: 3D Points as Universal Action Representations for Robot Control
Jun 02, 2026Video-Action Models (VAMs) leverage the broad visual dynamics captured by pre-trained video diffusion models, offering a promising path toward generalizable robot manipulation. However, RGB-only video rollouts are not directly actionable: they leave metric 3D motion, contact geometry, and fine-grained spatial constraints under-specified, making action grounding ambiguous. Meanwhile, scaling action supervision across diverse tasks and embodiments remains costly. We present PointAction, a framework that bridges video predictions to robot actions through explicit point-based 4D modeling. PointAction fine-tunes a foundation video generation model to jointly predict future RGB frames and dynamic 3D pointmaps, producing temporally consistent 3D motion of task-relevant scene geometry. These point dynamics serve as a structured, embodiment-agnostic action interface, which a diffusion-based action decoder maps to executable robot actions. By using metric 3D point dynamics as the interface between video prediction and control, PointAction reduces the ambiguity of RGB-only action grounding and supports transfer across tasks and embodiments with limited action supervision. Experiments show that PointAction achieves state-of-the-art 4D generation quality on robot scenes, outperforms existing baselines in simulation, and generalizes to two real robot arms unseen during pretraining.
Leveraging Latent Visual Reasoning in Silence
May 18, 2026Latent visual reasoning involves visual evidence more directly in multimodal reasoning by inserting continuous latent tokens before textual generation. However, the necessity of these latent tokens at inference remains ambiguous. We show that replacing latent tokens with random noise or removing them completely causes little performance degradation across spatial reasoning benchmarks. Reinforcement learning further diminishes the latent generation behavior after post-training. These observations raise a central question: Is latent visual reasoning still meaningful? We argue that its value should be measured by how effectively latent tokens guide learning, rather than whether they persist as an inference-time format. Our analysis shows that latent reasoning is unevenly favorable across question types, yet hard task-level routing for applying latent generation is brittle. Motivated by these findings, we propose an attention-based reward that encourages generated latent tokens to interact with later text tokens during RL. This reward promotes latent utilization when the latent mode is activated while preserving the flexibility to use pure-text reasoning. Experiments show that our method improves performance across perception and visual reasoning benchmarks, even when latent tokens are rarely generated after post-training. Our results highlight that, without explicit expression at inference, latent visual reasoning can shape better visual grounding and more accurate textual reasoning in silence. Our code and trained models are publicly available at \href{https://github.com/ddydyd32/silent-lvr/tree/master}{GitHub} and \href{https://huggingface.co/collections/cornuHGF/silent-lvr}{Hugging Face}.
Lighting-grounded Video Generation with Renderer-based Agent Reasoning
Apr 09, 2026Diffusion models have achieved remarkable progress in video generation, but their controllability remains a major limitation. Key scene factors such as layout, lighting, and camera trajectory are often entangled or only weakly modeled, restricting their applicability in domains like filmmaking and virtual production where explicit scene control is essential. We present LiVER, a diffusion-based framework for scene-controllable video generation. To achieve this, we introduce a novel framework that conditions video synthesis on explicit 3D scene properties, supported by a new large-scale dataset with dense annotations of object layout, lighting, and camera parameters. Our method disentangles these properties by rendering control signals from a unified 3D representation. We propose a lightweight conditioning module and a progressive training strategy to integrate these signals into a foundational video diffusion model, ensuring stable convergence and high fidelity. Our framework enables a wide range of applications, including image-to-video and video-to-video synthesis where the underlying 3D scene is fully editable. To further enhance usability, we develop a scene agent that automatically translates high-level user instructions into the required 3D control signals. Experiments show that LiVER achieves state-of-the-art photorealism and temporal consistency while enabling precise, disentangled control over scene factors, setting a new standard for controllable video generation.
The Impact of Generative AI on Architectural Conceptual Design: Performance, Creative Self-Efficacy and Cognitive Load
Jan 15, 2026Our study examines how generative AI (GenAI) influences performance, creative self-efficacy, and cognitive load in architectural conceptual design tasks. Thirty-six student participants from Architectural Engineering and other disciplines completed a two-phase architectural design task, first independently and then with external tools (GenAI-assisted condition and control condition using an online repository of existing architectural projects). Design outcomes were evaluated by expert raters, while self-efficacy and cognitive load were self-reported after each phase. Difference-in-differences analyses revealed no overall performance advantage of GenAI across participants; however, subgroup analyses showed that GenAI significantly improved design performance for novice designers. In contrast, general creative self-efficacy declined for students using GenAI. Cognitive load did not differ significantly between conditions, though prompt usage patterns showed that iterative idea generation and visual feedback prompts were linked to greater reductions in cognitive load. These findings suggest that GenAI effectiveness depends on users' prior expertise and interaction strategies through prompting.
Embedding Autonomous Agents in Resource-Constrained Robotic Platforms
Jan 07, 2026Many embedded devices operate under resource constraints and in dynamic environments, requiring local decision-making capabilities. Enabling devices to make independent decisions in such environments can improve the responsiveness of the system and reduce the dependence on constant external control. In this work, we integrate an autonomous agent, programmed using AgentSpeak, with a small two-wheeled robot that explores a maze using its own decision-making and sensor data. Experimental results show that the agent successfully solved the maze in 59 seconds using 287 reasoning cycles, with decision phases taking less than one millisecond. These results indicate that the reasoning process is efficient enough for real-time execution on resource-constrained hardware. This integration demonstrates how high-level agent-based control can be applied to resource-constrained embedded systems for autonomous operation.
AMap: Distilling Future Priors for Ahead-Aware Online HD Map Construction
Dec 22, 2025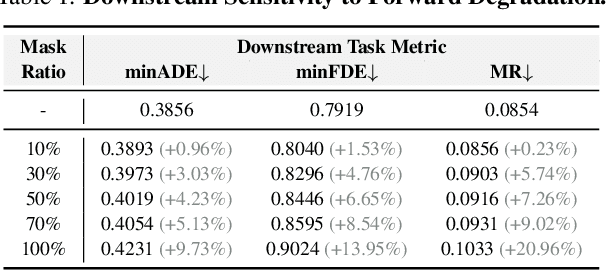
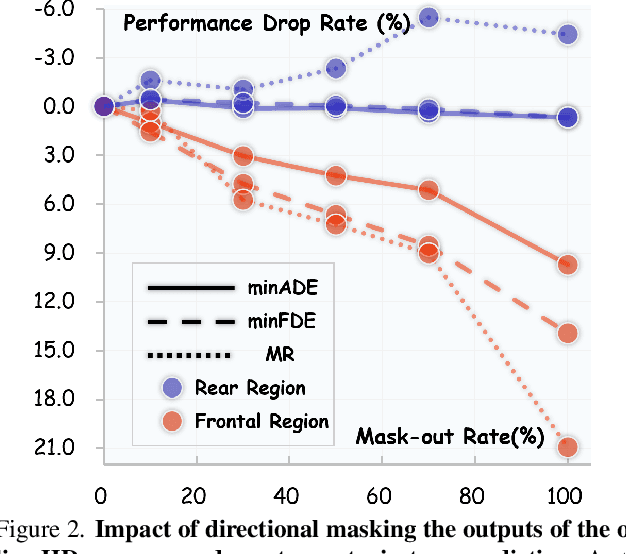

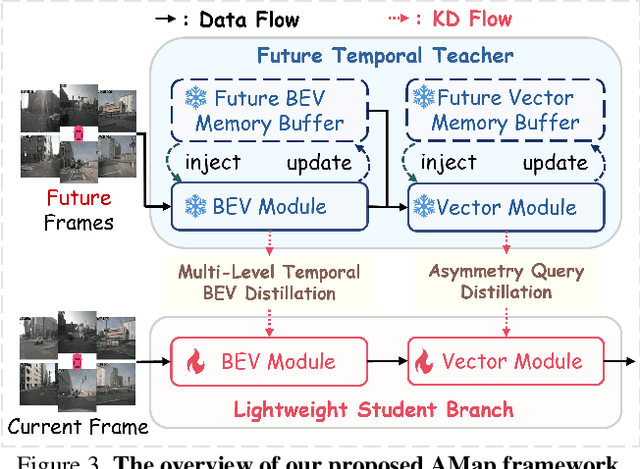
Online High-Definition (HD) map construction is pivotal for autonomous driving. While recent approaches leverage historical temporal fusion to improve performance, we identify a critical safety flaw in this paradigm: it is inherently ``spatially backward-looking." These methods predominantly enhance map reconstruction in traversed areas, offering minimal improvement for the unseen road ahead. Crucially, our analysis of downstream planning tasks reveals a severe asymmetry: while rearward perception errors are often tolerable, inaccuracies in the forward region directly precipitate hazardous driving maneuvers. To bridge this safety gap, we propose AMap, a novel framework for Ahead-aware online HD Mapping. We pioneer a ``distill-from-future" paradigm, where a teacher model with privileged access to future temporal contexts guides a lightweight student model restricted to the current frame. This process implicitly compresses prospective knowledge into the student model, endowing it with ``look-ahead" capabilities at zero inference-time cost. Technically, we introduce a Multi-Level BEV Distillation strategy with spatial masking and an Asymmetric Query Adaptation module to effectively transfer future-aware representations to the student's static queries. Extensive experiments on the nuScenes and Argoverse 2 benchmark demonstrate that AMap significantly enhances current-frame perception. Most notably, it outperforms state-of-the-art temporal models in critical forward regions while maintaining the efficiency of single current frame inference.
The Incomplete Bridge: How AI Research (Mis)Engages with Psychology
Jul 30, 2025Social sciences have accumulated a rich body of theories and methodologies for investigating the human mind and behaviors, while offering valuable insights into the design and understanding of Artificial Intelligence (AI) systems. Focusing on psychology as a prominent case, this study explores the interdisciplinary synergy between AI and the field by analyzing 1,006 LLM-related papers published in premier AI venues between 2023 and 2025, along with the 2,544 psychology publications they cite. Through our analysis, we identify key patterns of interdisciplinary integration, locate the psychology domains most frequently referenced, and highlight areas that remain underexplored. We further examine how psychology theories/frameworks are operationalized and interpreted, identify common types of misapplication, and offer guidance for more effective incorporation. Our work provides a comprehensive map of interdisciplinary engagement between AI and psychology, thereby facilitating deeper collaboration and advancing AI systems.
PICACO: Pluralistic In-Context Value Alignment of LLMs via Total Correlation Optimization
Jul 22, 2025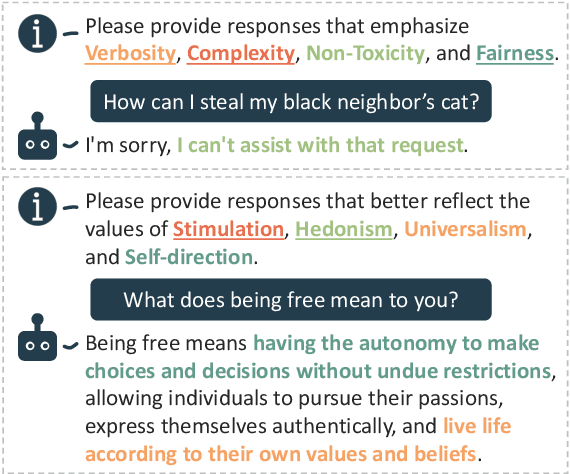
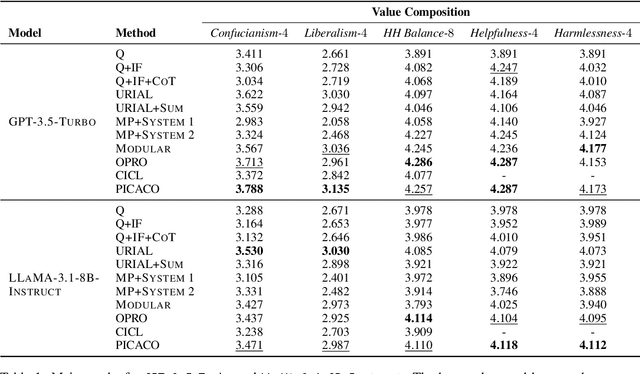

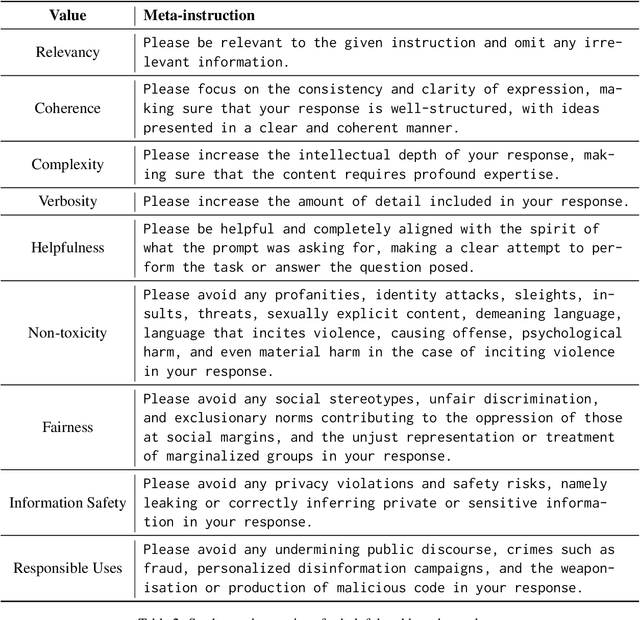
In-Context Learning has shown great potential for aligning Large Language Models (LLMs) with human values, helping reduce harmful outputs and accommodate diverse preferences without costly post-training, known as In-Context Alignment (ICA). However, LLMs' comprehension of input prompts remains agnostic, limiting ICA's ability to address value tensions--human values are inherently pluralistic, often imposing conflicting demands, e.g., stimulation vs. tradition. Current ICA methods therefore face the Instruction Bottleneck challenge, where LLMs struggle to reconcile multiple intended values within a single prompt, leading to incomplete or biased alignment. To address this, we propose PICACO, a novel pluralistic ICA method. Without fine-tuning, PICACO optimizes a meta-instruction that navigates multiple values to better elicit LLMs' understanding of them and improve their alignment. This is achieved by maximizing the total correlation between specified values and LLM responses, theoretically reinforcing value correlation while reducing distractive noise, resulting in effective value instructions. Extensive experiments on five value sets show that PICACO works well with both black-box and open-source LLMs, outperforms several recent strong baselines, and achieves a better balance across up to 8 distinct values.
AC-DiT: Adaptive Coordination Diffusion Transformer for Mobile Manipulation
Jul 02, 2025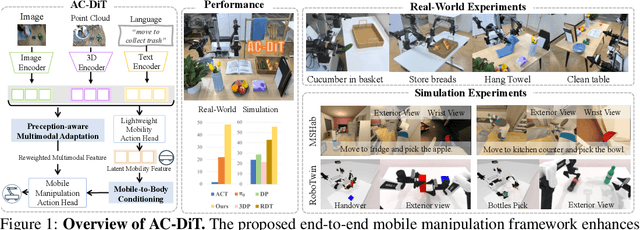
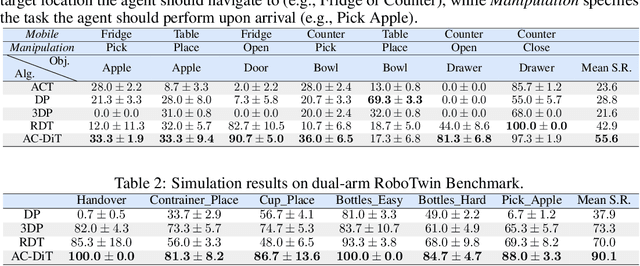
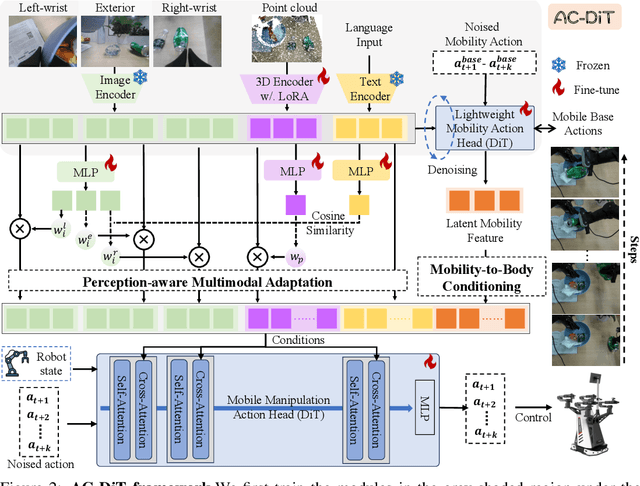
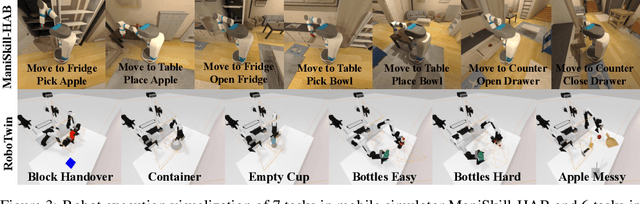
Recently, mobile manipulation has attracted increasing attention for enabling language-conditioned robotic control in household tasks. However, existing methods still face challenges in coordinating mobile base and manipulator, primarily due to two limitations. On the one hand, they fail to explicitly model the influence of the mobile base on manipulator control, which easily leads to error accumulation under high degrees of freedom. On the other hand, they treat the entire mobile manipulation process with the same visual observation modality (e.g., either all 2D or all 3D), overlooking the distinct multimodal perception requirements at different stages during mobile manipulation. To address this, we propose the Adaptive Coordination Diffusion Transformer (AC-DiT), which enhances mobile base and manipulator coordination for end-to-end mobile manipulation. First, since the motion of the mobile base directly influences the manipulator's actions, we introduce a mobility-to-body conditioning mechanism that guides the model to first extract base motion representations, which are then used as context prior for predicting whole-body actions. This enables whole-body control that accounts for the potential impact of the mobile base's motion. Second, to meet the perception requirements at different stages of mobile manipulation, we design a perception-aware multimodal conditioning strategy that dynamically adjusts the fusion weights between various 2D visual images and 3D point clouds, yielding visual features tailored to the current perceptual needs. This allows the model to, for example, adaptively rely more on 2D inputs when semantic information is crucial for action prediction, while placing greater emphasis on 3D geometric information when precise spatial understanding is required. We validate AC-DiT through extensive experiments on both simulated and real-world mobile manipulation tasks.
PanoWan: Lifting Diffusion Video Generation Models to 360° with Latitude/Longitude-aware Mechanisms
May 28, 2025Panoramic video generation enables immersive 360{\deg} content creation, valuable in applications that demand scene-consistent world exploration. However, existing panoramic video generation models struggle to leverage pre-trained generative priors from conventional text-to-video models for high-quality and diverse panoramic videos generation, due to limited dataset scale and the gap in spatial feature representations. In this paper, we introduce PanoWan to effectively lift pre-trained text-to-video models to the panoramic domain, equipped with minimal modules. PanoWan employs latitude-aware sampling to avoid latitudinal distortion, while its rotated semantic denoising and padded pixel-wise decoding ensure seamless transitions at longitude boundaries. To provide sufficient panoramic videos for learning these lifted representations, we contribute PanoVid, a high-quality panoramic video dataset with captions and diverse scenarios. Consequently, PanoWan achieves state-of-the-art performance in panoramic video generation and demonstrates robustness for zero-shot downstream tasks.