 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMMEmb-R1: Reasoning-Enhanced Multimodal Embedding with Pair-Aware Selection and Adaptive Control
Apr 07, 2026MLLMs have been successfully applied to multimodal embedding tasks, yet their generative reasoning capabilities remain underutilized. Directly incorporating chain-of-thought reasoning into embedding learning introduces two fundamental challenges. First, structural misalignment between instance-level reasoning and pairwise contrastive supervision may lead to shortcut behavior, where the model merely learns the superficial format of reasoning. Second, reasoning is not universally beneficial for embedding tasks. Enforcing reasoning for all inputs may introduce unnecessary computation and latency, and can even obscure salient semantic signals for simple cases. To address these issues, we propose MMEmb-R1, an adaptive reasoning-based multimodal embedding framework. We formulate reasoning as a latent variable and introduce pair-aware reasoning selection that employs counterfactual intervention to identify reasoning paths beneficial for query-target alignment. Furthermore, we adopt reinforcement learning to selectively invoke reasoning only when necessary. Experiments on the MMEB-V2 benchmark demonstrate that our model achieves a score of 71.2 with only 4B parameters, establishing a new state-of-the-art while significantly reducing reasoning overhead and inference latency.
Orbital Transformers for Predicting Wavefunctions in Time-Dependent Density Functional Theory
Mar 03, 2026We aim to learn wavefunctions simulated by time-dependent density functional theory (TDDFT), which can be efficiently represented as linear combination coefficients of atomic orbitals. In real-time TDDFT, the electronic wavefunctions of a molecule evolve over time in response to an external excitation, enabling first-principles predictions of physical properties such as optical absorption, electron dynamics, and high-order response. However, conventional real-time TDDFT relies on time-consuming propagation of all occupied states with fine time steps. In this work, we propose OrbEvo, which is based on an equivariant graph transformer architecture and learns to evolve the full electronic wavefunction coefficients across time steps. First, to account for external field, we design an equivariant conditioning to encode both strength and direction of external electric field and break the symmetry from SO(3) to SO(2). Furthermore, we design two OrbEvo models, OrbEvo-WF and OrbEvo-DM, using wavefunction pooling and density matrix as interaction method, respectively. Motivated by the central role of the density functional in TDDFT, OrbEvo-DM encodes the density matrix aggregated from all occupied electronic states into feature vectors via tensor contraction, providing a more intuitive approach to learn the time evolution operator. We adopt a training strategy specifically tailored to limit the error accumulation of time-dependent wavefunctions over autoregressive rollout. To evaluate our approach, we generate TDDFT datasets consisting of 5,000 different molecules in the QM9 dataset and 1,500 molecular configurations of the malonaldehyde molecule in the MD17 dataset. Results show that our OrbEvo model accurately captures quantum dynamics of excited states under external field, including time-dependent wavefunctions, time-dependent dipole moment, and optical absorption spectra.
MemPO: Self-Memory Policy Optimization for Long-Horizon Agents
Feb 28, 2026Long-horizon agents face the challenge of growing context size during interaction with environment, which degrades the performance and stability. Existing methods typically introduce the external memory module and look up the relevant information from the stored memory, which prevents the model itself from proactively managing its memory content and aligning with the agent's overarching task objectives. To address these limitations, we propose the self-memory policy optimization algorithm (MemPO), which enables the agent (policy model) to autonomously summarize and manage their memory during interaction with environment. By improving the credit assignment mechanism based on memory effectiveness, the policy model can selectively retain crucial information, significantly reducing token consumption while preserving task performance. Extensive experiments and analyses confirm that MemPO achieves absolute F1 score gains of 25.98% over the base model and 7.1% over the previous SOTA baseline, while reducing token usage by 67.58% and 73.12%.
Beyond Superficial Unlearning: Sharpness-Aware Robust Erasure of Hallucinations in Multimodal LLMs
Jan 23, 2026Multimodal LLMs are powerful but prone to object hallucinations, which describe non-existent entities and harm reliability. While recent unlearning methods attempt to mitigate this, we identify a critical flaw: structural fragility. We empirically demonstrate that standard erasure achieves only superficial suppression, trapping the model in sharp minima where hallucinations catastrophically resurge after lightweight relearning. To ensure geometric stability, we propose SARE, which casts unlearning as a targeted min-max optimization problem and uses a Targeted-SAM mechanism to explicitly flatten the loss landscape around hallucinated concepts. By suppressing hallucinations under simulated worst-case parameter perturbations, our framework ensures robust removal stable against weight shifts. Extensive experiments demonstrate that SARE significantly outperforms baselines in erasure efficacy while preserving general generation quality. Crucially, it maintains persistent hallucination suppression against relearning and parameter updates, validating the effectiveness of geometric stabilization.
Your One-Stop Solution for AI-Generated Video Detection
Jan 16, 2026Recent advances in generative modeling can create remarkably realistic synthetic videos, making it increasingly difficult for humans to distinguish them from real ones and necessitating reliable detection methods. However, two key limitations hinder the development of this field. \textbf{From the dataset perspective}, existing datasets are often limited in scale and constructed using outdated or narrowly scoped generative models, making it difficult to capture the diversity and rapid evolution of modern generative techniques. Moreover, the dataset construction process frequently prioritizes quantity over quality, neglecting essential aspects such as semantic diversity, scenario coverage, and technological representativeness. \textbf{From the benchmark perspective}, current benchmarks largely remain at the stage of dataset creation, leaving many fundamental issues and in-depth analysis yet to be systematically explored. Addressing this gap, we propose AIGVDBench, a benchmark designed to be comprehensive and representative, covering \textbf{31} state-of-the-art generation models and over \textbf{440,000} videos. By executing more than \textbf{1,500} evaluations on \textbf{33} existing detectors belonging to four distinct categories. This work presents \textbf{8 in-depth analyses} from multiple perspectives and identifies \textbf{4 novel findings} that offer valuable insights for future research. We hope this work provides a solid foundation for advancing the field of AI-generated video detection. Our benchmark is open-sourced at https://github.com/LongMa-2025/AIGVDBench.
ExpSeek: Self-Triggered Experience Seeking for Web Agents
Jan 13, 2026Experience intervention in web agents emerges as a promising technical paradigm, enhancing agent interaction capabilities by providing valuable insights from accumulated experiences. However, existing methods predominantly inject experience passively as global context before task execution, struggling to adapt to dynamically changing contextual observations during agent-environment interaction. We propose ExpSeek, which shifts experience toward step-level proactive seeking: (1) estimating step-level entropy thresholds to determine intervention timing using the model's intrinsic signals; (2) designing step-level tailor-designed experience content. Experiments on Qwen3-8B and 32B models across four challenging web agent benchmarks demonstrate that ExpSeek achieves absolute improvements of 9.3% and 7.5%, respectively. Our experiments validate the feasibility and advantages of entropy as a self-triggering signal, reveal that even a 4B small-scale experience model can significantly boost the performance of larger agent models.
EvoRoute: Experience-Driven Self-Routing LLM Agent Systems
Jan 06, 2026Complex agentic AI systems, powered by a coordinated ensemble of Large Language Models (LLMs), tool and memory modules, have demonstrated remarkable capabilities on intricate, multi-turn tasks. However, this success is shadowed by prohibitive economic costs and severe latency, exposing a critical, yet underexplored, trade-off. We formalize this challenge as the \textbf{Agent System Trilemma}: the inherent tension among achieving state-of-the-art performance, minimizing monetary cost, and ensuring rapid task completion. To dismantle this trilemma, we introduce EvoRoute, a self-evolving model routing paradigm that transcends static, pre-defined model assignments. Leveraging an ever-expanding knowledge base of prior experience, EvoRoute dynamically selects Pareto-optimal LLM backbones at each step, balancing accuracy, efficiency, and resource use, while continually refining its own selection policy through environment feedback. Experiments on challenging agentic benchmarks such as GAIA and BrowseComp+ demonstrate that EvoRoute, when integrated into off-the-shelf agentic systems, not only sustains or enhances system performance but also reduces execution cost by up to $80\%$ and latency by over $70\%$.
CME-CAD: Heterogeneous Collaborative Multi-Expert Reinforcement Learning for CAD Code Generation
Dec 29, 2025Computer-Aided Design (CAD) is essential in industrial design, but the complexity of traditional CAD modeling and workflows presents significant challenges for automating the generation of high-precision, editable CAD models. Existing methods that reconstruct 3D models from sketches often produce non-editable and approximate models that fall short of meeting the stringent requirements for precision and editability in industrial design. Moreover, the reliance on text or image-based inputs often requires significant manual annotation, limiting their scalability and applicability in industrial settings. To overcome these challenges, we propose the Heterogeneous Collaborative Multi-Expert Reinforcement Learning (CME-CAD) paradigm, a novel training paradigm for CAD code generation. Our approach integrates the complementary strengths of these models, facilitating collaborative learning and improving the model's ability to generate accurate, constraint-compatible, and fully editable CAD models. We introduce a two-stage training process: Multi-Expert Fine-Tuning (MEFT), and Multi-Expert Reinforcement Learning (MERL). Additionally, we present CADExpert, an open-source benchmark consisting of 17,299 instances, including orthographic projections with precise dimension annotations, expert-generated Chain-of-Thought (CoT) processes, executable CADQuery code, and rendered 3D models.
AMap: Distilling Future Priors for Ahead-Aware Online HD Map Construction
Dec 22, 2025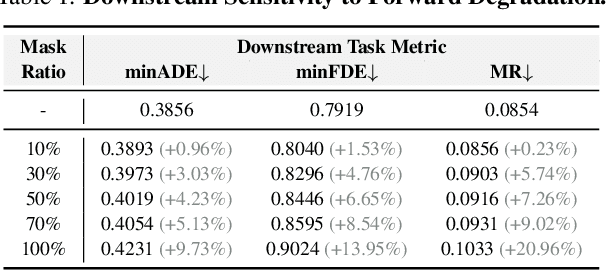
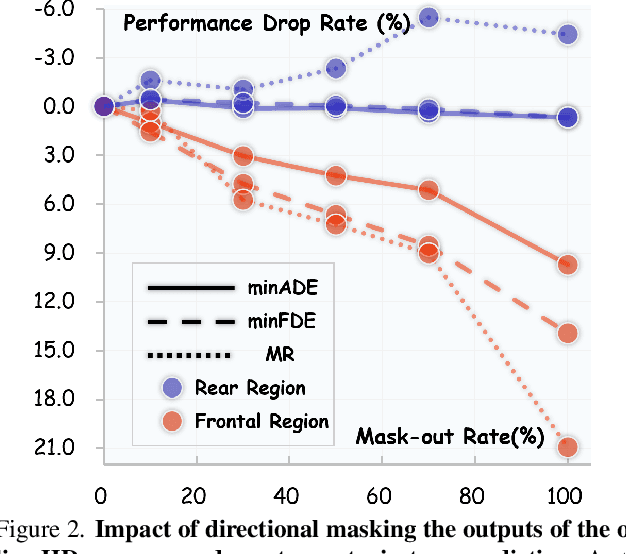

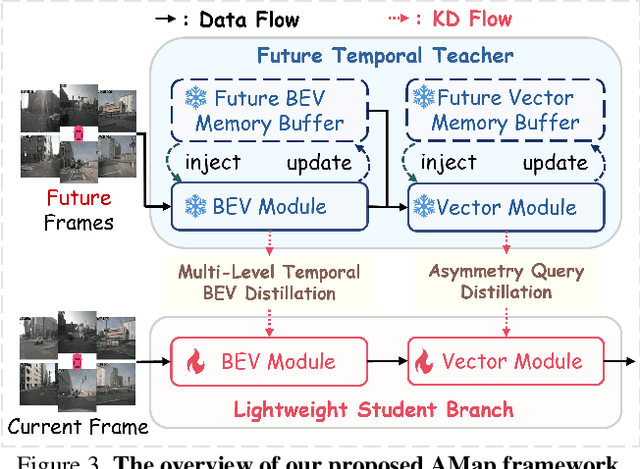
Online High-Definition (HD) map construction is pivotal for autonomous driving. While recent approaches leverage historical temporal fusion to improve performance, we identify a critical safety flaw in this paradigm: it is inherently ``spatially backward-looking." These methods predominantly enhance map reconstruction in traversed areas, offering minimal improvement for the unseen road ahead. Crucially, our analysis of downstream planning tasks reveals a severe asymmetry: while rearward perception errors are often tolerable, inaccuracies in the forward region directly precipitate hazardous driving maneuvers. To bridge this safety gap, we propose AMap, a novel framework for Ahead-aware online HD Mapping. We pioneer a ``distill-from-future" paradigm, where a teacher model with privileged access to future temporal contexts guides a lightweight student model restricted to the current frame. This process implicitly compresses prospective knowledge into the student model, endowing it with ``look-ahead" capabilities at zero inference-time cost. Technically, we introduce a Multi-Level BEV Distillation strategy with spatial masking and an Asymmetric Query Adaptation module to effectively transfer future-aware representations to the student's static queries. Extensive experiments on the nuScenes and Argoverse 2 benchmark demonstrate that AMap significantly enhances current-frame perception. Most notably, it outperforms state-of-the-art temporal models in critical forward regions while maintaining the efficiency of single current frame inference.
SAIL-Embedding Technical Report: Omni-modal Embedding Foundation Model
Oct 14, 2025



Multimodal embedding models aim to yield informative unified representations that empower diverse cross-modal tasks. Despite promising developments in the evolution from CLIP-based dual-tower architectures to large vision-language models, prior works still face unavoidable challenges in real-world applications and business scenarios, such as the limited modality support, unstable training mechanisms, and industrial domain gaps. In this work, we introduce SAIL-Embedding, an omni-modal embedding foundation model that addresses these issues through tailored training strategies and architectural design. In the optimization procedure, we propose a multi-stage training scheme to boost the multifaceted effectiveness of representation learning. Specifically, the content-aware progressive training aims to enhance the model's adaptability to diverse downstream tasks and master enriched cross-modal proficiency. The collaboration-aware recommendation enhancement training further adapts multimodal representations for recommendation scenarios by distilling knowledge from sequence-to-item and ID-to-item embeddings while mining user historical interests. Concurrently, we develop the stochastic specialization and dataset-driven pattern matching to strengthen model training flexibility and generalizability. Experimental results show that SAIL-Embedding achieves SOTA performance compared to other methods in different retrieval tasks. In online experiments across various real-world scenarios integrated with our model, we observe a significant increase in Lifetime (LT), which is a crucial indicator for the recommendation experience. For instance, the model delivers the 7-day LT gain of +0.158% and the 14-day LT gain of +0.144% in the Douyin-Selected scenario. For the Douyin feed rank model, the match features produced by SAIL-Embedding yield a +0.08% AUC gain.