 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBORA: Bridging Offline Reinforcement Learning and Online Residual Adaptation for Real-World Dexterous VLA Models
May 28, 2026Vision-Language-Action (VLA) models have emerged as a promising paradigm for grounding visual-language understanding into real-world robotic manipulation. However, dexterous manipulation remains challenging for VLA policies due to high-dimensional hand control and compounding execution errors, which makes real-world RL post-training essential for bridging the gap between visually grounded action generation and physically reliable dexterous execution. However, high-dimensional dexterous exploration often triggers temporal inconsistency, sample inefficiency and hardware risks in the real world. To address these challenges, we propose BORA, an offline-to-online RL post-training framework designed for real-world dexterous VLA models. In the offline phase, BORA constructs a critic that takes both the VLM's cognition tokens and action chunks as inputs. This design enables action-conditioned value guidance, allowing the critic to evaluate dexterous hand motions beyond visual context alone. During the subsequent online phase, BORA freezes the VLA base and introduces a lightweight, Human-in-the-Loop (HiL) chunk-wise residual adaptation mechanism to mitigate real-world execution errors and further correct the offline-learned intents within the actual physical environment. By inheriting the offline critic and employing intervention-driven rewards, BORA effectively corrects execution discrepancies and adapts to real-world physical variances while preserving the pretrained policy as a stable prior. Extensive evaluations across five complex real-world dexterous tasks demonstrate that BORA significantly outperforms pure imitation learning and traditional decoupled RL baselines, achieving a 33% absolute increase in average success rate under standard settings and up to a 43% improvement in unseen object generalization.
$π_0$-EqM: Equilibrium Matching for Closed-Loop Vision-Language-Action Control
May 22, 2026Currently, Vision-Language-Action (VLA) models have become the most adopted paradigm for robotic manipulation for its great potential for task generalization. While most generative flow-matching action decoders for VLA control are often deployed with fixed sampling horizons, limiting state-dependent compute and temporal reuse across control cycles. We present $π_0$-EqM, which replaces the flow-matching expert in $π_0$ with an Equilibrium Matching (EqM) decoder while leaving the upstream VLA stack unchanged. Under a matched 300-step budget, $π_0$-EqM improves RoboTwin average success from 40.4% to 50.2% across 19 tasks and remains competitive on LIBERO, with its clearest gain on LIBERO-10 (87.0%). Two threshold scans reveal a task-dependent non-monotonic relation between residual and success, which we term the stationarity--executability gap. The results suggest that inference depth in iterative VLA control is part of policy design and introduce an energy-based VLA perspective that may inform future work on composable action generation across tasks and embodiments.
Rein3D: Reinforced 3D Indoor Scene Generation with Panoramic Video Diffusion Models
Apr 14, 2026The growing demand for Embodied AI and VR applications has highlighted the need for synthesizing high-quality 3D indoor scenes from sparse inputs. However, existing approaches struggle to infer massive amounts of missing geometry in large unseen areas while maintaining global consistency, often producing locally plausible but globally inconsistent reconstructions. We present Rein3D, a framework that reconstructs full 360-degree indoor environments by coupling explicit 3D Gaussian Splatting (3DGS) with temporally coherent priors from video diffusion models. Our approach follows a "restore-and-refine" paradigm: we employ a radial exploration strategy to render imperfect panoramic videos along trajectories starting from the origin, effectively uncovering occluded regions from a coarse 3DGS initialization. These sequences are restored by a panoramic video-to-video diffusion model and further enhanced via video super-resolution to synthesize high-fidelity geometry and textures. Finally, these refined videos serve as pseudo-ground truths to update the global 3D Gaussian field. To support this task, we construct PanoV2V-15K, a dataset of over 15K paired clean and degraded panoramic videos for diffusion-based scene restoration. Experiments demonstrate that Rein3D produces photorealistic and globally consistent 3D scenes and significantly improves long-range camera exploration compared with existing baselines.
R3DP: Real-Time 3D-Aware Policy for Embodied Manipulation
Mar 15, 2026Embodied manipulation requires accurate 3D understanding of objects and their spatial relations to plan and execute contact-rich actions. While large-scale 3D vision models provide strong priors, their computational cost incurs prohibitive latency for real-time control. We propose Real-time 3D-aware Policy (R3DP), which integrates powerful 3D priors into manipulation policies without sacrificing real-time performance. A core innovation of R3DP is the asynchronous fast-slow collaboration module, which seamlessly integrates large-scale 3D priors into the policy without compromising real-time performance. The system maintains real-time efficiency by querying the pre-trained slow system (VGGT) only on sparse key frames, while simultaneously employing a lightweight Temporal Feature Prediction Network (TFPNet) to predict features for all intermediate frames. By leveraging historical data to exploit temporal correlations, TFPNet explicitly improves task success rates through consistent feature estimation. Additionally, to enable more effective multi-view fusion, we introduce a Multi-View Feature Fuser (MVFF) that aggregates features across views by explicitly incorporating camera intrinsics and extrinsics. R3DP offers a plug-and-play solution for integrating large models into real-time inference systems. We evaluate R3DP against multiple baselines across different visual configurations. R3DP effectively harnesses large-scale 3D priors to achieve superior results, outperforming single-view and multi-view DP by 32.9% and 51.4% in average success rate, respectively. Furthermore, by decoupling heavy 3D reasoning from policy execution, R3DP achieves a 44.8% reduction in inference time compared to a naive DP+VGGT integration.
DexHiL: A Human-in-the-Loop Framework for Vision-Language-Action Model Post-Training in Dexterous Manipulation
Mar 10, 2026While Vision-Language-Action (VLA) models have demonstrated promising generalization capabilities in robotic manipulation, deploying them on specific and complex downstream tasks still demands effective post-training. In parallel, Human-in-the-Loop (HiL) learning has proven to be a powerful mechanism for refining robot policies. However, extending this paradigm to dexterous manipulation remains challenging: multi-finger control is high-dimensional, contact-intensive, and exhibits execution distributions that differ markedly from standard arm motions, leaving existing dexterous VLA systems limited in reliability and adaptability. We present DexHiL, the first integrated arm-hand human-in-the-loop framework for dexterous VLA models, enabling coordinated interventions over the arm and the dexterous hand within a single system. DexHiL introduces an intervention-aware data sampling strategy that prioritizes corrective segments for post-training, alongside a lightweight teleoperation interface that supports instantaneous human corrections during execution. Real-robot experiments demonstrate that DexHiL serves as an effective post-training framework, yielding a substantial performance leap, outperforming standard offline-only fine-tuning baselines by an average of 25% in success rates across distinct tasks. Project page: https://chenzhongxi-sjtu.github.io/dexhil/
UniVTAC: A Unified Simulation Platform for Visuo-Tactile Manipulation Data Generation, Learning, and Benchmarking
Feb 10, 2026Robotic manipulation has seen rapid progress with vision-language-action (VLA) policies. However, visuo-tactile perception is critical for contact-rich manipulation, as tasks such as insertion are difficult to complete robustly using vision alone. At the same time, acquiring large-scale and reliable tactile data in the physical world remains costly and challenging, and the lack of a unified evaluation platform further limits policy learning and systematic analysis. To address these challenges, we propose UniVTAC, a simulation-based visuo-tactile data synthesis platform that supports three commonly used visuo-tactile sensors and enables scalable and controllable generation of informative contact interactions. Based on this platform, we introduce the UniVTAC Encoder, a visuo-tactile encoder trained on large-scale simulation-synthesized data with designed supervisory signals, providing tactile-centric visuo-tactile representations for downstream manipulation tasks. In addition, we present the UniVTAC Benchmark, which consists of eight representative visuo-tactile manipulation tasks for evaluating tactile-driven policies. Experimental results show that integrating the UniVTAC Encoder improves average success rates by 17.1% on the UniVTAC Benchmark, while real-world robotic experiments further demonstrate a 25% improvement in task success. Our webpage is available at https://univtac.github.io/.
Perceiving and Acting in First-Person: A Dataset and Benchmark for Egocentric Human-Object-Human Interactions
Aug 06, 2025
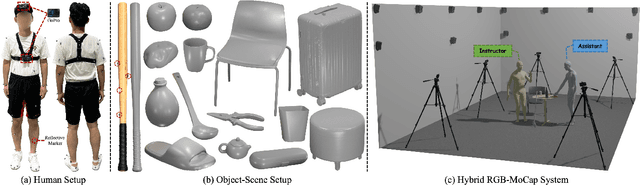

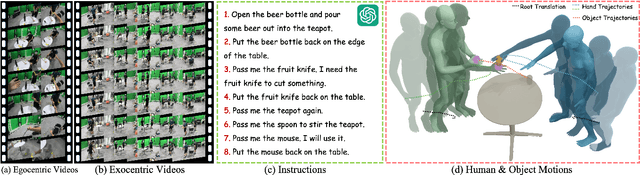
Learning action models from real-world human-centric interaction datasets is important towards building general-purpose intelligent assistants with efficiency. However, most existing datasets only offer specialist interaction category and ignore that AI assistants perceive and act based on first-person acquisition. We urge that both the generalist interaction knowledge and egocentric modality are indispensable. In this paper, we embed the manual-assisted task into a vision-language-action framework, where the assistant provides services to the instructor following egocentric vision and commands. With our hybrid RGB-MoCap system, pairs of assistants and instructors engage with multiple objects and the scene following GPT-generated scripts. Under this setting, we accomplish InterVLA, the first large-scale human-object-human interaction dataset with 11.4 hours and 1.2M frames of multimodal data, spanning 2 egocentric and 5 exocentric videos, accurate human/object motions and verbal commands. Furthermore, we establish novel benchmarks on egocentric human motion estimation, interaction synthesis, and interaction prediction with comprehensive analysis. We believe that our InterVLA testbed and the benchmarks will foster future works on building AI agents in the physical world.
HIMO: A New Benchmark for Full-Body Human Interacting with Multiple Objects
Jul 17, 2024



Generating human-object interactions (HOIs) is critical with the tremendous advances of digital avatars. Existing datasets are typically limited to humans interacting with a single object while neglecting the ubiquitous manipulation of multiple objects. Thus, we propose HIMO, a large-scale MoCap dataset of full-body human interacting with multiple objects, containing 3.3K 4D HOI sequences and 4.08M 3D HOI frames. We also annotate HIMO with detailed textual descriptions and temporal segments, benchmarking two novel tasks of HOI synthesis conditioned on either the whole text prompt or the segmented text prompts as fine-grained timeline control. To address these novel tasks, we propose a dual-branch conditional diffusion model with a mutual interaction module for HOI synthesis. Besides, an auto-regressive generation pipeline is also designed to obtain smooth transitions between HOI segments. Experimental results demonstrate the generalization ability to unseen object geometries and temporal compositions.
Inter-X: Towards Versatile Human-Human Interaction Analysis
Dec 26, 2023



The analysis of the ubiquitous human-human interactions is pivotal for understanding humans as social beings. Existing human-human interaction datasets typically suffer from inaccurate body motions, lack of hand gestures and fine-grained textual descriptions. To better perceive and generate human-human interactions, we propose Inter-X, a currently largest human-human interaction dataset with accurate body movements and diverse interaction patterns, together with detailed hand gestures. The dataset includes ~11K interaction sequences and more than 8.1M frames. We also equip Inter-X with versatile annotations of more than 34K fine-grained human part-level textual descriptions, semantic interaction categories, interaction order, and the relationship and personality of the subjects. Based on the elaborate annotations, we propose a unified benchmark composed of 4 categories of downstream tasks from both the perceptual and generative directions. Extensive experiments and comprehensive analysis show that Inter-X serves as a testbed for promoting the development of versatile human-human interaction analysis. Our dataset and benchmark will be publicly available for research purposes.