 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePOLAR: A Portrait OLAT Dataset and Generative Framework for Illumination-Aware Face Modeling
Dec 16, 2025Face relighting aims to synthesize realistic portraits under novel illumination while preserving identity and geometry. However, progress remains constrained by the limited availability of large-scale, physically consistent illumination data. To address this, we introduce POLAR, a large-scale and physically calibrated One-Light-at-a-Time (OLAT) dataset containing over 200 subjects captured under 156 lighting directions, multiple views, and diverse expressions. Building upon POLAR, we develop a flow-based generative model POLARNet that predicts per-light OLAT responses from a single portrait, capturing fine-grained and direction-aware illumination effects while preserving facial identity. Unlike diffusion or background-conditioned methods that rely on statistical or contextual cues, our formulation models illumination as a continuous, physically interpretable transformation between lighting states, enabling scalable and controllable relighting. Together, POLAR and POLARNet form a unified illumination learning framework that links real data, generative synthesis, and physically grounded relighting, establishing a self-sustaining "chicken-and-egg" cycle for scalable and reproducible portrait illumination. Our project page: https://rex0191.github.io/POLAR/.
Perceiving and Acting in First-Person: A Dataset and Benchmark for Egocentric Human-Object-Human Interactions
Aug 06, 2025
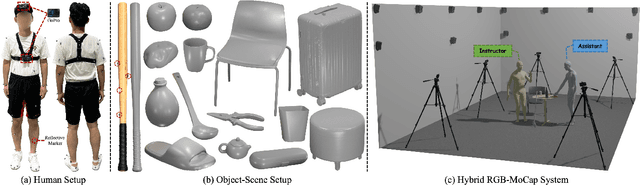

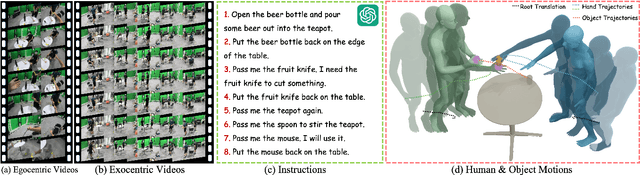
Learning action models from real-world human-centric interaction datasets is important towards building general-purpose intelligent assistants with efficiency. However, most existing datasets only offer specialist interaction category and ignore that AI assistants perceive and act based on first-person acquisition. We urge that both the generalist interaction knowledge and egocentric modality are indispensable. In this paper, we embed the manual-assisted task into a vision-language-action framework, where the assistant provides services to the instructor following egocentric vision and commands. With our hybrid RGB-MoCap system, pairs of assistants and instructors engage with multiple objects and the scene following GPT-generated scripts. Under this setting, we accomplish InterVLA, the first large-scale human-object-human interaction dataset with 11.4 hours and 1.2M frames of multimodal data, spanning 2 egocentric and 5 exocentric videos, accurate human/object motions and verbal commands. Furthermore, we establish novel benchmarks on egocentric human motion estimation, interaction synthesis, and interaction prediction with comprehensive analysis. We believe that our InterVLA testbed and the benchmarks will foster future works on building AI agents in the physical world.