 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable Forensics of Manipulated Segments in Untrimmed Long Videos
Jun 01, 2026The rapid advancement of AI-driven video generation has transformed content creation, while simultaneously increasing the risk of misinformation through localized manipulations in long-form videos. Existing video forensic methods predominantly operate on short, independent clips, and thus fail to capture realistic scenarios where AI-generated content is sparsely embedded within otherwise authentic footage. To bridge this gap, we formulate the task of Temporal AI-Generated Segment Localization and Explanation, which targets authenticity detection, temporal localization, and interpretable analysis of manipulated segments in untrimmed long videos. We further introduce TASLE, a large-scale benchmark comprising 12,472 untrimmed videos with diverse manipulation patterns and rich annotation signals, including temporal boundaries, authenticity labels, and segment-level rationales. In addition, we propose MSLoc, a coarse-to-fine forensic baseline that combines a boundary-sensitive proposal generation module for efficient long-video scanning with an MLLM-based refinement module for precise boundary localization and interpretable reasoning. Experiments validate the effectiveness of the proposed baseline, highlighting the importance of segment-level explainable forensics for long-form AI-generated video analysis. Our dataset and code are publicly available at https://debby-0527.github.io/TASLE.
Object Referring-Guided Scanpath Prediction with Perception-Enhanced Vision-Language Models
Apr 22, 2026Object Referring-guided Scanpath Prediction (ORSP) aims to predict the human attention scanpath when they search for a specific target object in a visual scene according to a linguistic description describing the object. Multimodal information fusion is a key point of ORSP. Therefore, we propose a novel model, ScanVLA, to first exploit a Vision-Language Model (VLM) to extract and fuse inherently aligned visual and linguistic feature representations from the input image and referring expression. Next, to enhance the ScanVLA's perception of fine-grained positional information, we not only propose a novel History Enhanced Scanpath Decoder (HESD) that directly takes historical fixations' position information as input to help predict a more reasonable position for the current fixation, but also adopt a frozen Segmentation LoRA as an auxiliary component to help localize the referred object more precisely, which improves the scanpath prediction task without incurring additional large computational and time costs. Extensive experimental results demonstrate that ScanVLA can significantly outperform existing scanpath prediction methods under object referring.
HTNav: A Hybrid Navigation Framework with Tiered Structure for Urban Aerial Vision-and-Language Navigation
Apr 10, 2026Inspired by the general Vision-and-Language Navigation (VLN) task, aerial VLN has attracted widespread attention, owing to its significant practical value in applications such as logistics delivery and urban inspection. However, existing methods face several challenges in complex urban environments, including insufficient generalization to unseen scenes, suboptimal performance in long-range path planning, and inadequate understanding of spatial continuity. To address these challenges, we propose HTNav, a new collaborative navigation framework that integrates Imitation Learning (IL) and Reinforcement Learning (RL) within a hybrid IL-RL framework. This framework adopts a staged training mechanism to ensure the stability of the basic navigation strategy while enhancing its environmental exploration capability. By integrating a tiered decision-making mechanism, it achieves collaborative interaction between macro-level path planning and fine-grained action control. Furthermore, a map representation learning module is introduced to deepen its understanding of spatial continuity in open domains. On the CityNav benchmark, our method achieves state-of-the-art performance across all scene levels and task difficulties. Experimental results demonstrate that this framework significantly improves navigation precision and robustness in complex urban environments.
AgentVLN: Towards Agentic Vision-and-Language Navigation
Mar 18, 2026Vision-and-Language Navigation (VLN) requires an embodied agent to ground complex natural-language instructions into long-horizon navigation in unseen environments. While Vision-Language Models (VLMs) offer strong 2D semantic understanding, current VLN systems remain constrained by limited spatial perception, 2D-3D representation mismatch, and monocular scale ambiguity. In this paper, we propose AgentVLN, a novel and efficient embodied navigation framework that can be deployed on edge computing platforms. We formulate VLN as a Partially Observable Semi-Markov Decision Process (POSMDP) and introduce a VLM-as-Brain paradigm that decouples high-level semantic reasoning from perception and planning via a plug-and-play skill library. To resolve multi-level representation inconsistency, we design a cross-space representation mapping that projects perception-layer 3D topological waypoints into the image plane, yielding pixel-aligned visual prompts for the VLM. Building on this bridge, we integrate a context-aware self-correction and active exploration strategy to recover from occlusions and suppress error accumulation over long trajectories. To further address the spatial ambiguity of instructions in unstructured environments, we propose a Query-Driven Perceptual Chain-of-Thought (QD-PCoT) scheme, enabling the agent with the metacognitive ability to actively seek geometric depth information. Finally, we construct AgentVLN-Instruct, a large-scale instruction-tuning dataset with dynamic stage routing conditioned on target visibility. Extensive experiments show that AgentVLN consistently outperforms prior state-of-the-art methods (SOTA) on long-horizon VLN benchmarks, offering a practical paradigm for lightweight deployment of next-generation embodied navigation models. Code: https://github.com/Allenxinn/AgentVLN.
DecoVLN: Decoupling Observation, Reasoning, and Correction for Vision-and-Language Navigation
Mar 13, 2026Vision-and-Language Navigation (VLN) requires agents to follow long-horizon instructions and navigate complex 3D environments. However, existing approaches face two major challenges: constructing an effective long-term memory bank and overcoming the compounding errors problem. To address these issues, we propose DecoVLN, an effective framework designed for robust streaming perception and closed-loop control in long-horizon navigation. First, we formulate long-term memory construction as an optimization problem and introduce adaptive refinement mechanism that selects frames from a historical candidate pool by iteratively optimizing a unified scoring function. This function jointly balances three key criteria: semantic relevance to the instruction, visual diversity from the selected memory, and temporal coverage of the historical trajectory. Second, to alleviate compounding errors, we introduce a state-action pair-level corrective finetuning strategy. By leveraging geodesic distance between states to precisely quantify deviation from the expert trajectory, the agent collects high-quality state-action pairs in the trusted region while filtering out the polluted data with low relevance. This improves both the efficiency and stability of error correction. Extensive experiments demonstrate the effectiveness of DecoVLN, and we have deployed it in real-world environments.
History-Enhanced Two-Stage Transformer for Aerial Vision-and-Language Navigation
Dec 17, 2025



Aerial Vision-and-Language Navigation (AVLN) requires Unmanned Aerial Vehicle (UAV) agents to localize targets in large-scale urban environments based on linguistic instructions. While successful navigation demands both global environmental reasoning and local scene comprehension, existing UAV agents typically adopt mono-granularity frameworks that struggle to balance these two aspects. To address this limitation, this work proposes a History-Enhanced Two-Stage Transformer (HETT) framework, which integrates the two aspects through a coarse-to-fine navigation pipeline. Specifically, HETT first predicts coarse-grained target positions by fusing spatial landmarks and historical context, then refines actions via fine-grained visual analysis. In addition, a historical grid map is designed to dynamically aggregate visual features into a structured spatial memory, enhancing comprehensive scene awareness. Additionally, the CityNav dataset annotations are manually refined to enhance data quality. Experiments on the refined CityNav dataset show that HETT delivers significant performance gains, while extensive ablation studies further verify the effectiveness of each component.
STAR: STacked AutoRegressive Scheme for Unified Multimodal Learning
Dec 15, 2025



Multimodal large language models (MLLMs) play a pivotal role in advancing the quest for general artificial intelligence. However, achieving unified target for multimodal understanding and generation remains challenging due to optimization conflicts and performance trade-offs. To effectively enhance generative performance while preserving existing comprehension capabilities, we introduce STAR: a STacked AutoRegressive scheme for task-progressive unified multimodal learning. This approach decomposes multimodal learning into multiple stages: understanding, generation, and editing. By freezing the parameters of the fundamental autoregressive (AR) model and progressively stacking isomorphic AR modules, it avoids cross-task interference while expanding the model's capabilities. Concurrently, we introduce a high-capacity VQ to enhance the granularity of image representations and employ an implicit reasoning mechanism to improve generation quality under complex conditions. Experiments demonstrate that STAR achieves state-of-the-art performance on GenEval (0.91), DPG-Bench (87.44), and ImgEdit (4.34), validating its efficacy for unified multimodal learning.
LoFA: Learning to Predict Personalized Priors for Fast Adaptation of Visual Generative Models
Dec 09, 2025Personalizing visual generative models to meet specific user needs has gained increasing attention, yet current methods like Low-Rank Adaptation (LoRA) remain impractical due to their demand for task-specific data and lengthy optimization. While a few hypernetwork-based approaches attempt to predict adaptation weights directly, they struggle to map fine-grained user prompts to complex LoRA distributions, limiting their practical applicability. To bridge this gap, we propose LoFA, a general framework that efficiently predicts personalized priors for fast model adaptation. We first identify a key property of LoRA: structured distribution patterns emerge in the relative changes between LoRA and base model parameters. Building on this, we design a two-stage hypernetwork: first predicting relative distribution patterns that capture key adaptation regions, then using these to guide final LoRA weight prediction. Extensive experiments demonstrate that our method consistently predicts high-quality personalized priors within seconds, across multiple tasks and user prompts, even outperforming conventional LoRA that requires hours of processing. Project page: https://jaeger416.github.io/lofa/.
MoniTor: Exploiting Large Language Models with Instruction for Online Video Anomaly Detection
Oct 24, 2025Video Anomaly Detection (VAD) aims to locate unusual activities or behaviors within videos. Recently, offline VAD has garnered substantial research attention, which has been invigorated by the progress in large language models (LLMs) and vision-language models (VLMs), offering the potential for a more nuanced understanding of anomalies. However, online VAD has seldom received attention due to real-time constraints and computational intensity. In this paper, we introduce a novel Memory-based online scoring queue scheme for Training-free VAD (MoniTor), to address the inherent complexities in online VAD. Specifically, MoniTor applies a streaming input to VLMs, leveraging the capabilities of pre-trained large-scale models. To capture temporal dependencies more effectively, we incorporate a novel prediction mechanism inspired by Long Short-Term Memory (LSTM) networks. This ensures the model can effectively model past states and leverage previous predictions to identify anomalous behaviors. Thereby, it better understands the current frame. Moreover, we design a scoring queue and an anomaly prior to dynamically store recent scores and cover all anomalies in the monitoring scenario, providing guidance for LLMs to distinguish between normal and abnormal behaviors over time. We evaluate MoniTor on two large datasets (i.e., UCF-Crime and XD-Violence) containing various surveillance and real-world scenarios. The results demonstrate that MoniTor outperforms state-of-the-art methods and is competitive with weakly supervised methods without training. Code is available at https://github.com/YsTvT/MoniTor.
Perceiving and Acting in First-Person: A Dataset and Benchmark for Egocentric Human-Object-Human Interactions
Aug 06, 2025
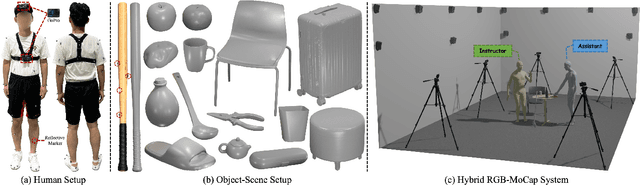

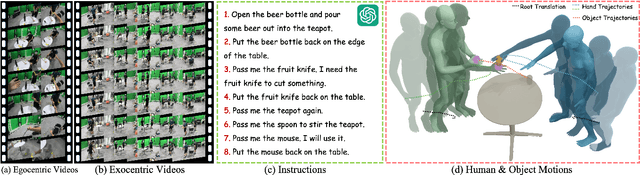
Learning action models from real-world human-centric interaction datasets is important towards building general-purpose intelligent assistants with efficiency. However, most existing datasets only offer specialist interaction category and ignore that AI assistants perceive and act based on first-person acquisition. We urge that both the generalist interaction knowledge and egocentric modality are indispensable. In this paper, we embed the manual-assisted task into a vision-language-action framework, where the assistant provides services to the instructor following egocentric vision and commands. With our hybrid RGB-MoCap system, pairs of assistants and instructors engage with multiple objects and the scene following GPT-generated scripts. Under this setting, we accomplish InterVLA, the first large-scale human-object-human interaction dataset with 11.4 hours and 1.2M frames of multimodal data, spanning 2 egocentric and 5 exocentric videos, accurate human/object motions and verbal commands. Furthermore, we establish novel benchmarks on egocentric human motion estimation, interaction synthesis, and interaction prediction with comprehensive analysis. We believe that our InterVLA testbed and the benchmarks will foster future works on building AI agents in the physical world.