 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Active Signal Emitter Placement In Complex Environments
May 04, 2024Placement of electromagnetic signal emitting devices, such as light sources, has important usage in for signal coverage tasks. Automatic placement of these devices is challenging because of the complex interaction of the signal and environment due to reflection, refraction and scattering. In this work, we iteratively improve the placement of these devices by interleaving device placement and sensing actions, correcting errors in the model of the signal propagation. To this end, we propose a novel factor-graph based belief model which combines the measurements taken by the robot and an analytical light propagation model. This model allows accurately modelling the uncertainty of the light propagation with respect to the obstacles, which greatly improves the informative path planning routine. Additionally, we propose a method for determining when to re-plan the emitter placements to balance a trade-off between information about a specific configuration and frequent updating of the configuration. This method incorporates the uncertainty from belief model to adaptively determine when re-configuration is needed. We find that our system has a 9.8% median error reduction compared to a baseline system in simulations in the most difficult environment. We also run on-robot tests and determine that our system performs favorably compared to the baseline.
Reducing Network Load via Message Utility Estimation for Decentralized Multirobot Teams
Apr 14, 2023We are motivated by quantile estimation of algae concentration in lakes. We find that multirobot teams improve performance in this task over single robots, and communication-enabled teams further over communication-deprived teams; however, real robots are resource-constrained, and communication networks cannot support arbitrary message loads, making na\"ive, constant information-sharing but also complex modeling and decision-making infeasible. With this in mind, we propose online, locally computable metrics for determining the utility of transmitting a given message to the other team members and a decision-theoretic approach that chooses to transmit only the most useful messages, using a decentralized and independent framework for maintaining beliefs of other teammates. We validate our approach in simulation on a real-world aquatic dataset, and show that restricting communication via a utility estimation method based on the expected impact of a message on future teammate behavior results in a 44% decrease in network load while increasing quantile estimation error by only 2.16%.
Learned Parameter Selection for Robotic Information Gathering
Mar 09, 2023When robots are deployed in the field for environmental monitoring they typically execute pre-programmed motions, such as lawnmower paths, instead of adaptive methods, such as informative path planning. One reason for this is that adaptive methods are dependent on parameter choices that are both critical to set correctly and difficult for the non-specialist to choose. Here, we show how to automatically configure a planner for informative path planning by training a reinforcement learning agent to select planner parameters at each iteration of informative path planning. We demonstrate our method with 37 instances of 3 distinct environments, and compare it against pure (end-to-end) reinforcement learning techniques, as well as approaches that do not use a learned model to change the planner parameters. Our method shows a 9.53% mean improvement in the cumulative reward across diverse environments when compared to end-to-end learning based methods; we also demonstrate via a field experiment how it can be readily used to facilitate high performance deployment of an information gathering robot.
A Study on Multirobot Quantile Estimation in Natural Environments
Mar 06, 2023Quantiles of a natural phenomena can provide scientists with an important understanding of typical, extreme, or other spreads of concentrations. When a group has several available robots, or teams of scientists come together to study a particular environment, it may be advantageous to pool robot resources in a collaborative way to improve performance. A multirobot team can be difficult to practically bring together and coordinate, especially when robot communication is involved. To this end, we present a study across several axes of the impact of using multiple robots to estimate quantiles of a distribution of interest using an informative path planning formulation. We measure quantile estimation accuracy with increasing team size to understand what benefits result from a multirobot approach in a drone exploration task of analyzing the algae concentration in lakes. We additionally perform an analysis on several parameters, including the spread of robot initial positions, the planning budget, and inter-robot communication, and find that while using more robots generally results in lower estimation error, this benefit is achieved under certain conditions. We present our findings in the context of real field robotic applications and discuss the implications of the results and interesting directions for future work.
Fast and Scalable Signal Inference for Active Robotic Source Seeking
Jan 06, 2023



In active source seeking, a robot takes repeated measurements in order to locate a signal source in a cluttered and unknown environment. A key component of an active source seeking robot planner is a model that can produce estimates of the signal at unknown locations with uncertainty quantification. This model allows the robot to plan for future measurements in the environment. Traditionally, this model has been in the form of a Gaussian process, which has difficulty scaling and cannot represent obstacles. %In this work, We propose a global and local factor graph model for active source seeking, which allows the model to scale to a large number of measurements and represent unknown obstacles in the environment. We combine this model with extensions to a highly scalable planner to form a system for large-scale active source seeking. We demonstrate that our approach outperforms baseline methods in both simulated and real robot experiments.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022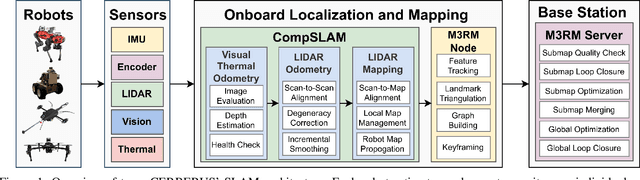
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
LAMP 2.0: A Robust Multi-Robot SLAM System for Operation in Challenging Large-Scale Underground Environments
May 31, 2022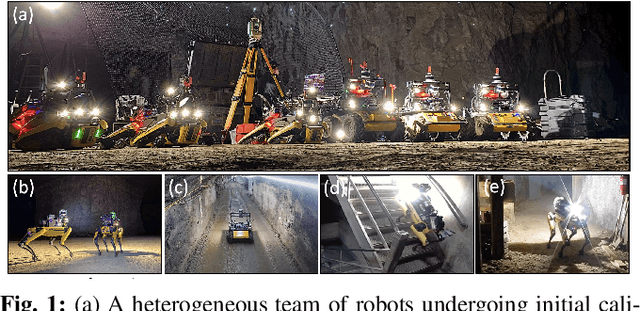
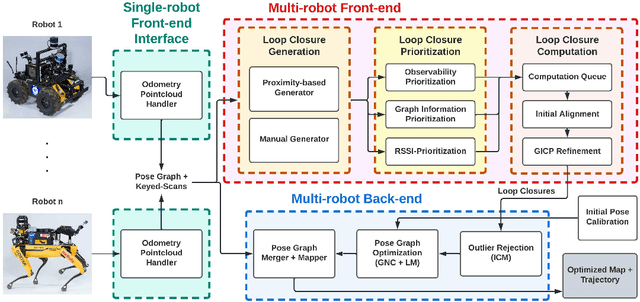
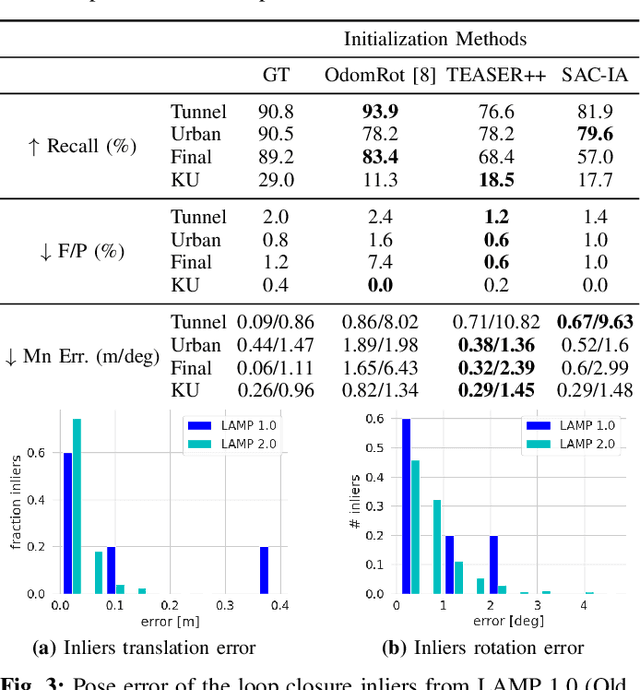
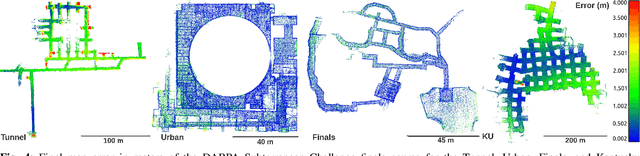
Search and rescue with a team of heterogeneous mobile robots in unknown and large-scale underground environments requires high-precision localization and mapping. This crucial requirement is faced with many challenges in complex and perceptually-degraded subterranean environments, as the onboard perception system is required to operate in off-nominal conditions (poor visibility due to darkness and dust, rugged and muddy terrain, and the presence of self-similar and ambiguous scenes). In a disaster response scenario and in the absence of prior information about the environment, robots must rely on noisy sensor data and perform Simultaneous Localization and Mapping (SLAM) to build a 3D map of the environment and localize themselves and potential survivors. To that end, this paper reports on a multi-robot SLAM system developed by team CoSTAR in the context of the DARPA Subterranean Challenge. We extend our previous work, LAMP, by incorporating a single-robot front-end interface that is adaptable to different odometry sources and lidar configurations, a scalable multi-robot front-end to support inter- and intra-robot loop closure detection for large scale environments and multi-robot teams, and a robust back-end equipped with an outlier-resilient pose graph optimization based on Graduated Non-Convexity. We provide a detailed ablation study on the multi-robot front-end and back-end, and assess the overall system performance in challenging real-world datasets collected across mines, power plants, and caves in the United States. We also release our multi-robot back-end datasets (and the corresponding ground truth), which can serve as challenging benchmarks for large-scale underground SLAM.
Loop Closure Prioritization for Efficient and Scalable Multi-Robot SLAM
May 24, 2022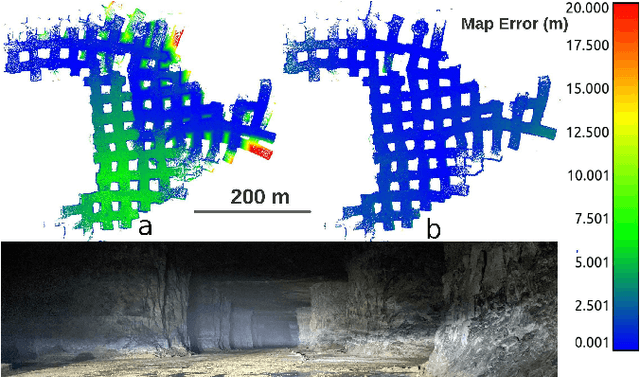
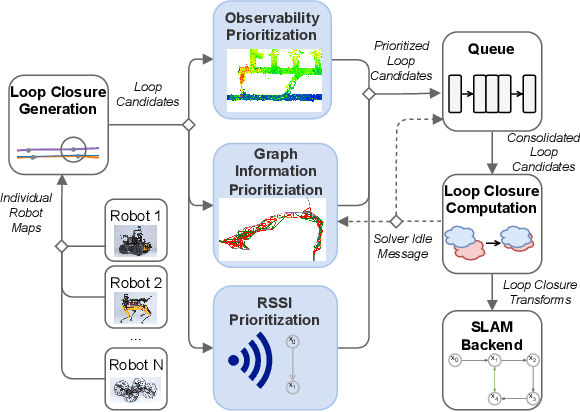
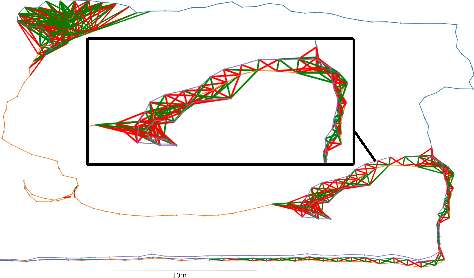
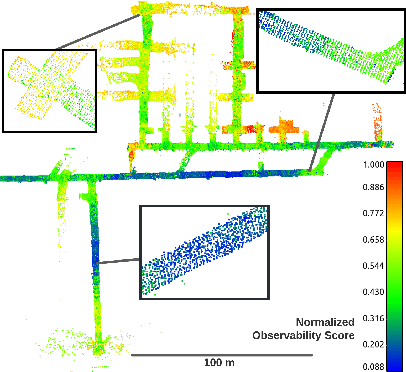
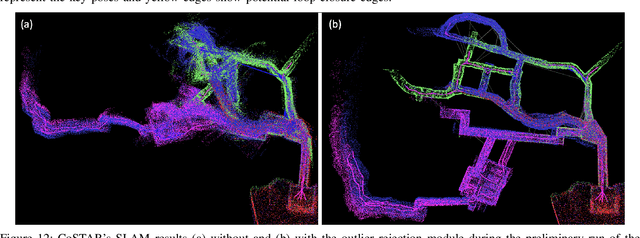
Multi-robot SLAM systems in GPS-denied environments require loop closures to maintain a drift-free centralized map. With an increasing number of robots and size of the environment, checking and computing the transformation for all the loop closure candidates becomes computationally infeasible. In this work, we describe a loop closure module that is able to prioritize which loop closures to compute based on the underlying pose graph, the proximity to known beacons, and the characteristics of the point clouds. We validate this system in the context of the DARPA Subterranean Challenge and on numerous challenging underground datasets and demonstrate the ability of this system to generate and maintain a map with low error. We find that our proposed techniques are able to select effective loop closures which results in 51% mean reduction in median error when compared to an odometric solution and 75% mean reduction in median error when compared to a baseline version of this system with no prioritization. We also find our proposed system is able to find a lower error in the mission time of one hour when compared to a system that processes every possible loop closure in four and a half hours.
Adaptive Sampling to Estimate Quantiles for Guiding Physical Sampling
Jan 25, 2022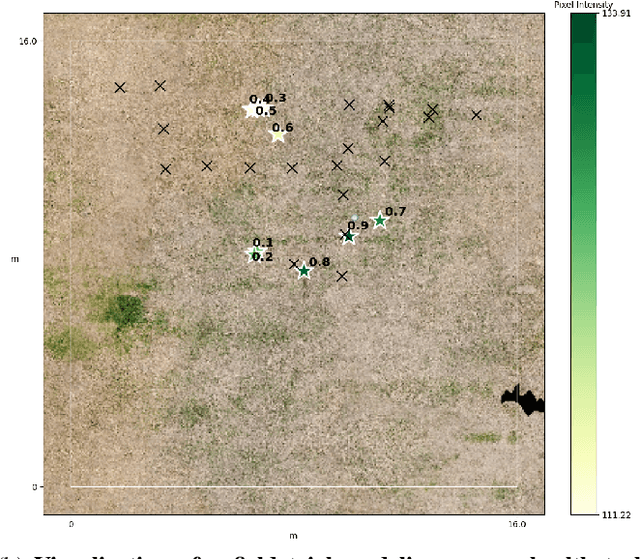
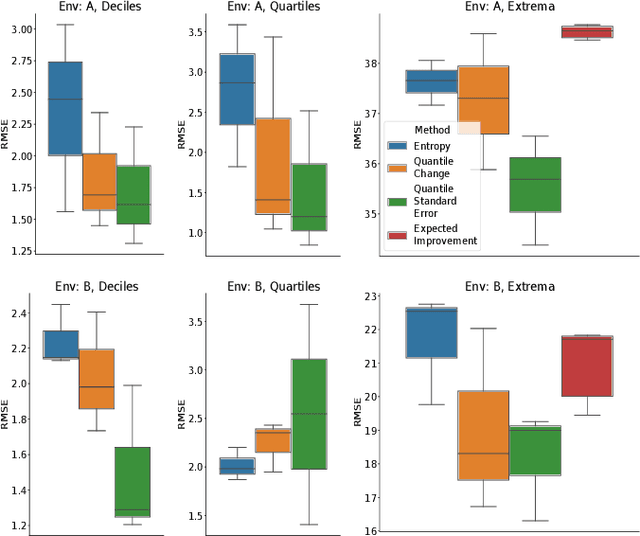
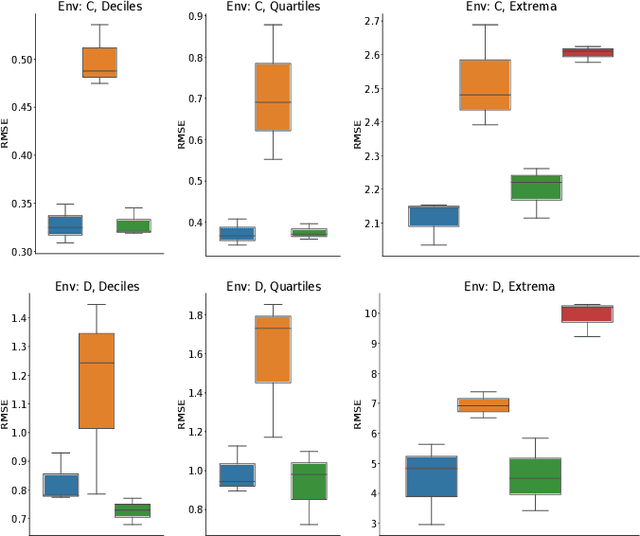
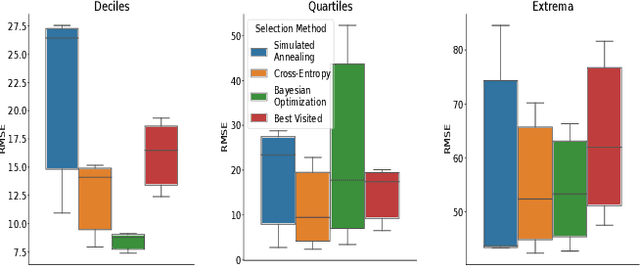
Scientists interested in studying natural phenomena often take physical samples for later analysis at locations specified by expert heuristics. Instead, we propose to guide scientists' physical sampling by using a robot to perform an adaptive sampling survey to find locations to suggest that correspond to the quantile values of pre-specified quantiles of interest. We develop a robot planner using novel objective functions to improve the estimates of the quantile values over time and an approach to find locations which correspond to the quantile values. We demonstrate our approach on two different sampling tasks in simulation using previously collected aquatic data and validate it in a field trial. Our approach outperforms objectives that maximize spatial coverage or find extrema in planning and is able to localize the quantile spatial locations.