 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$D^*_{+}$: A Generic Platform-Agnostic and Risk-Aware Path Planing Framework with an Expandable Grid
Dec 10, 2021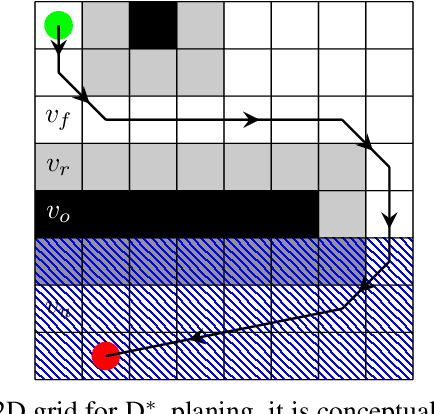
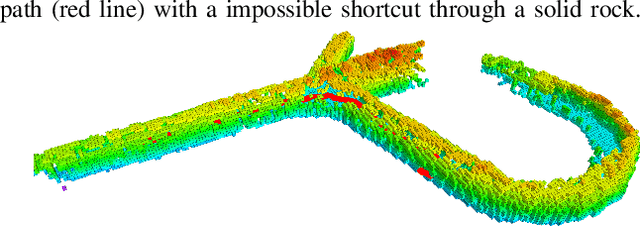
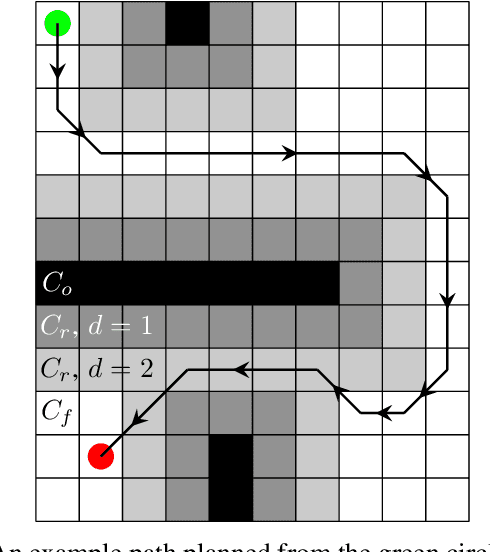
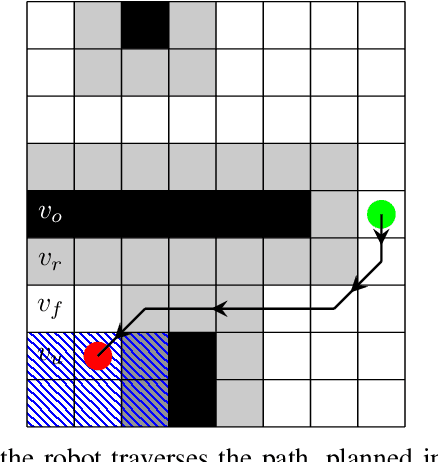
This article establishes a novel generic and platform-agnostic risk-aware path planning framework that is based on the classical $D^*$ lite planner with a path design focus on safety and efficiency. The planner generates a grid map where the occupied/free/unknown spaces are represented with different traversal costs. As it will presented, in this case, a traversal cost is added to the unknown voxels that are close to an occupied one. The algorithmic implementation is also enhanced with a dynamic grid map that has the novel ability to update and expand during the robotic operation and thus increase the overall safety of the mission and it is suitable for exploration and search and rescue missions. On the generated grid map, the $D^*$ lite is able to plan a safer path that has a minimum traversal cost. The proposed path planning framework is suitable for generating 2D and 3D paths, for ground and aerial robots respectively and thus in the 3D case, the grid is created with one voxel height to plan for a 2D path, which is the main factor that differentiates between 2D and 3D path planning. The efficacy of the proposed novel path planning scheme is extensively evaluated in multiple simulation and real-world field experiments on both a quadcopter platform and the Boston Dynamics Spot legged robot.
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds
Oct 01, 2021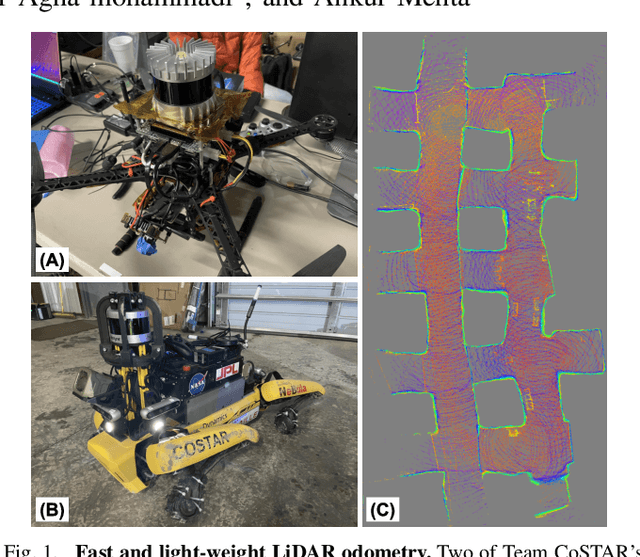
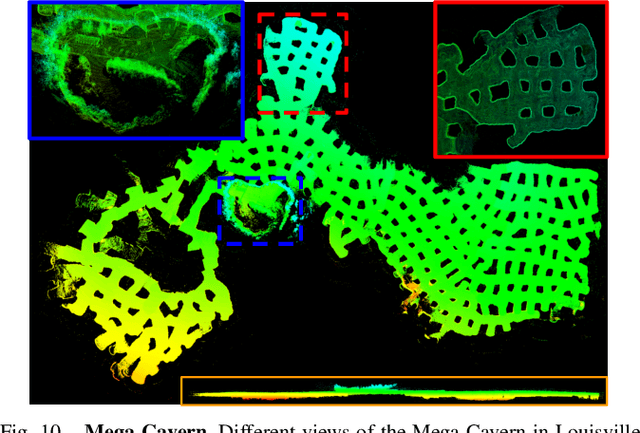
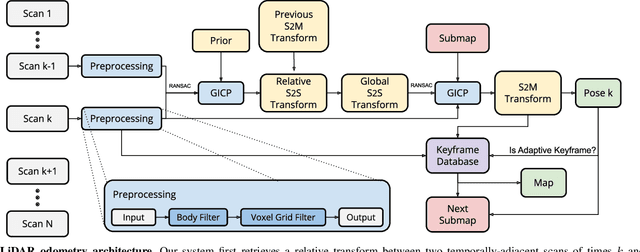
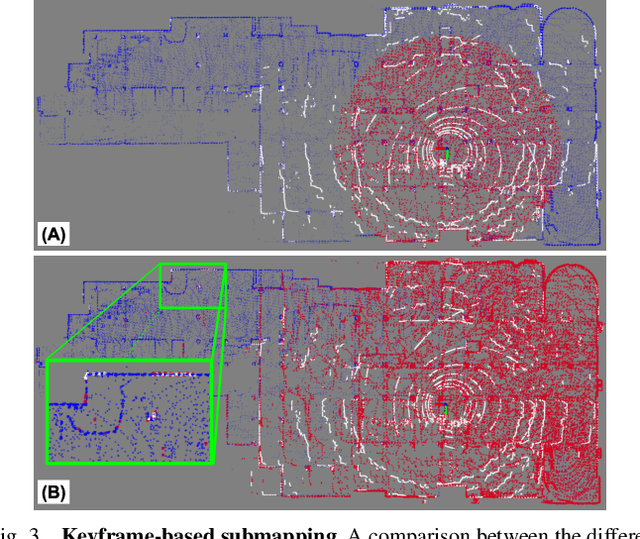
This paper presents a light-weight frontend LiDAR odometry solution with consistent and accurate localization for computationally-limited robotic platforms. Our Direct LiDAR Odometry (DLO) method includes several key algorithmic innovations which prioritize computational efficiency and enables the use of full, minimally-preprocessed point clouds to provide accurate pose estimates in real-time. This work also presents several important algorithmic insights and design choices from developing on platforms with shared or otherwise limited computational resources, including a custom iterative closest point solver for fast point cloud registration with data structure recycling. Our method is more accurate with lower computational overhead than the current state-of-the-art and has been extensively evaluated in several perceptually-challenging environments on aerial and legged robots as part of NASA JPL Team CoSTAR's research and development efforts for the DARPA Subterranean Challenge.
COMPRA: A COMPact Reactive Autonomy framework for subterranean MAV based search-and-rescue operations
Aug 30, 2021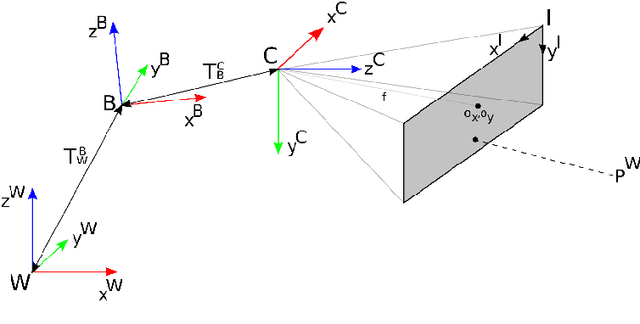
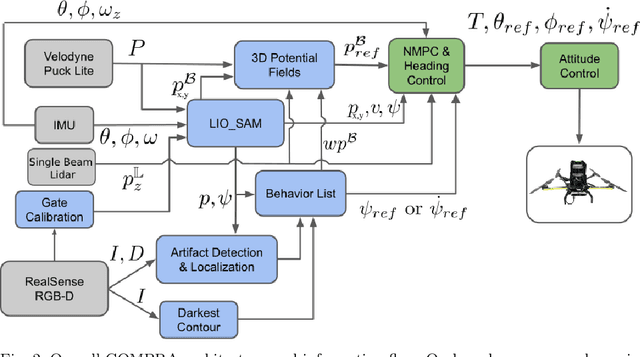
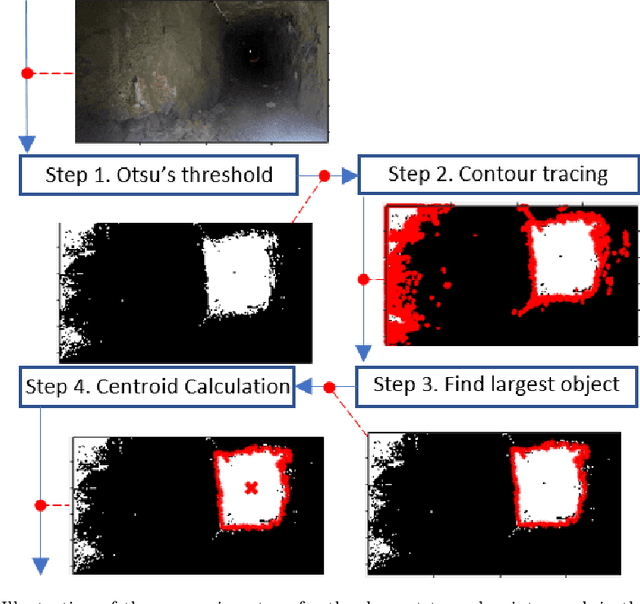

This work establishes COMPRA, a compact and reactive autonomy framework for fast deployment of MAVs in subterranean Search-and-Rescue missions. A COMPRA-enabled MAV is able to autonomously explore previously unknown areas while specific mission criteria are considered e.g. an object of interest is identified and localized, the remaining useful battery life, the overall desired exploration mission duration. The proposed architecture follows a low-complexity algorithmic design to facilitate fully on-board computations, including nonlinear control, state-estimation, navigation, exploration behavior and object localization capabilities. The framework is mainly structured around a reactive local avoidance planner, based on enhanced Potential Field concepts and using instantaneous 3D pointclouds, as well as a computationally efficient heading regulation technique, based on contour detection on an instantaneous camera stream. Those techniques decouple the collision-free path generation from the dependency of a global map and are capable of handling imprecise localization occasions. Field experimental verification of the overall architecture is performed in relevant unknown GPS-denied environments.
Learning Risk-aware Costmaps for Traversability in Challenging Environments
Jul 25, 2021
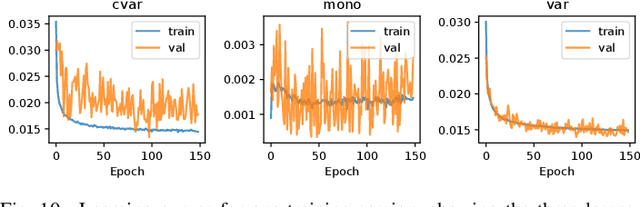
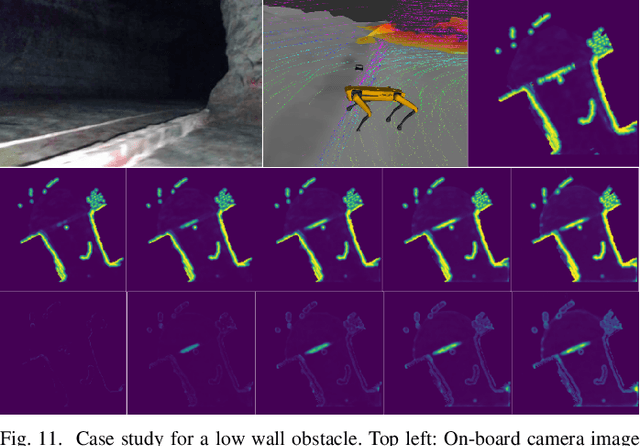
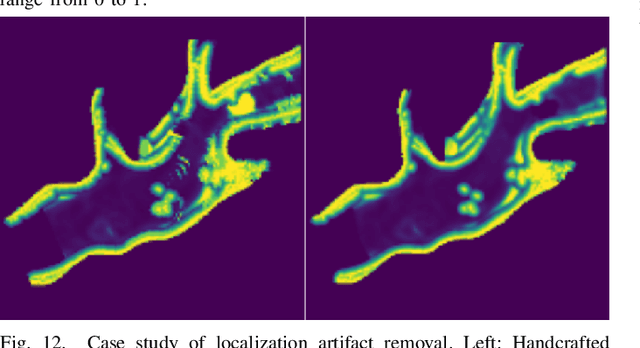
One of the main challenges in autonomous robotic exploration and navigation in unknown and unstructured environments is determining where the robot can or cannot safely move. A significant source of difficulty in this determination arises from stochasticity and uncertainty, coming from localization error, sensor sparsity and noise, difficult-to-model robot-ground interactions, and disturbances to the motion of the vehicle. Classical approaches to this problem rely on geometric analysis of the surrounding terrain, which can be prone to modeling errors and can be computationally expensive. Moreover, modeling the distribution of uncertain traversability costs is a difficult task, compounded by the various error sources mentioned above. In this work, we take a principled learning approach to this problem. We introduce a neural network architecture for robustly learning the distribution of traversability costs. Because we are motivated by preserving the life of the robot, we tackle this learning problem from the perspective of learning tail-risks, i.e. the Conditional Value-at-Risk (CVaR). We show that this approach reliably learns the expected tail risk given a desired probability risk threshold between 0 and 1, producing a traversability costmap which is more robust to outliers, more accurately captures tail risks, and is more computationally efficient, when compared against baselines. We validate our method on data collected a legged robot navigating challenging, unstructured environments including an abandoned subway, limestone caves, and lava tube caves.
Belief Space Planning: A Covariance Steering Approach
May 24, 2021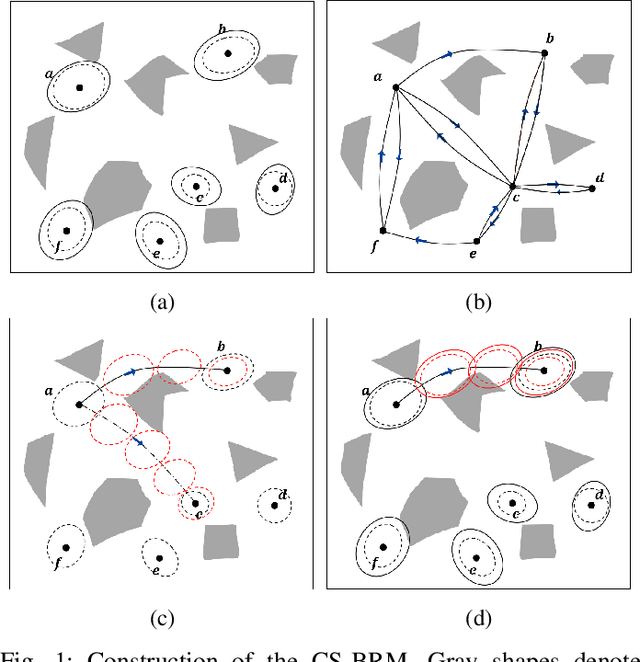
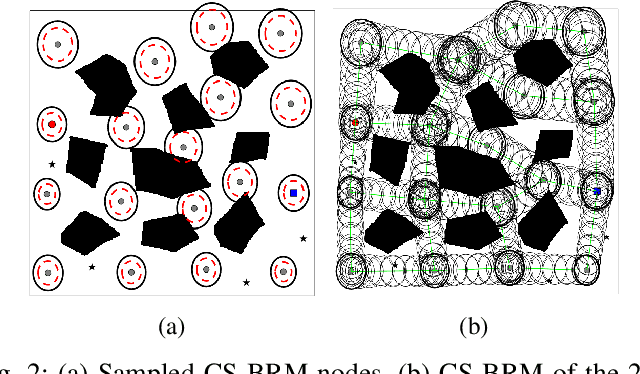
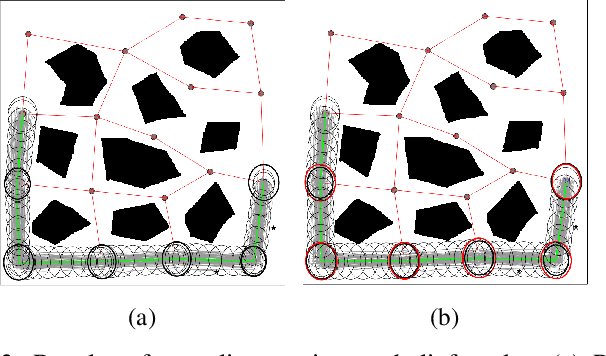
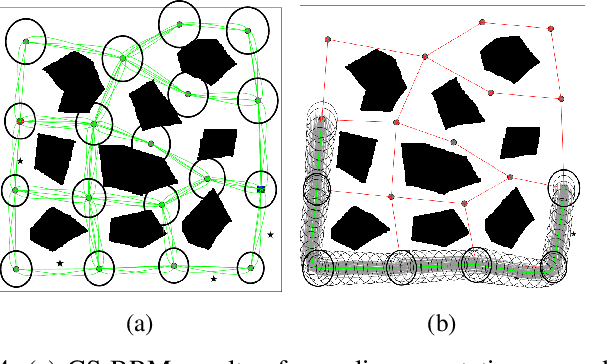
A new belief space planning algorithm, called covariance steering Belief RoadMap (CS-BRM), is introduced, which is a multi-query algorithm for motion planning of dynamical systems under simultaneous motion and observation uncertainties. CS-BRM extends the probabilistic roadmap (PRM) approach to belief spaces and is based on the recently developed theory of covariance steering (CS) that enables guaranteed satisfaction of terminal belief constraints in finite-time. The nodes in the CS-BRM are sampled in belief space and represent distributions of the system states. A covariance steering controller steers the system from one BRM node to another, thus acting as an edge controller of the corresponding belief graph that ensures belief constraint satisfaction. After the edge controller is computed, a specific edge cost is assigned to that edge. The CS-BRM algorithm allows the sampling of non-stationary belief nodes, and thus is able to explore the velocity space and find efficient motion plans. The performance of CS-BRM is evaluated and compared to a previous belief space planning method, demonstrating the benefits of the proposed approach.
Exploration-RRT: A multi-objective Path Planning and Exploration Framework for Unknown and Unstructured Environments
Apr 08, 2021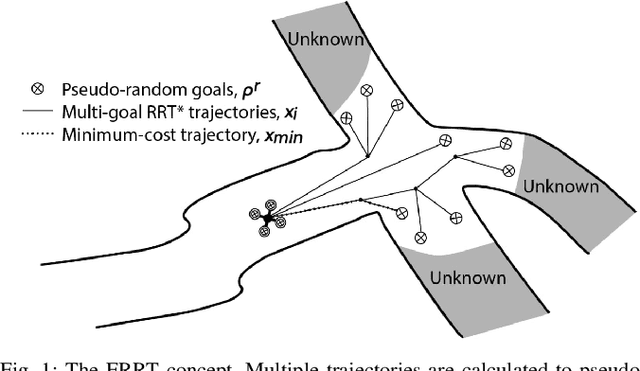
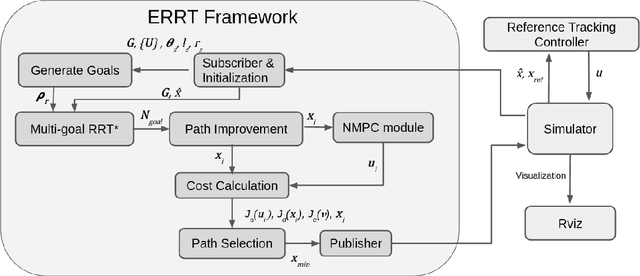
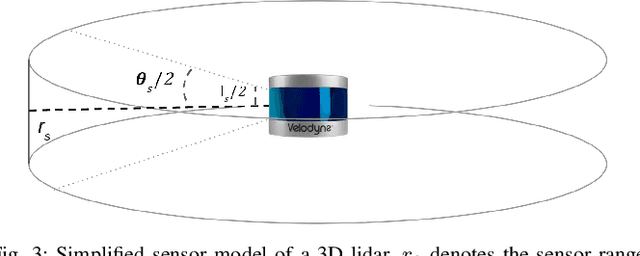
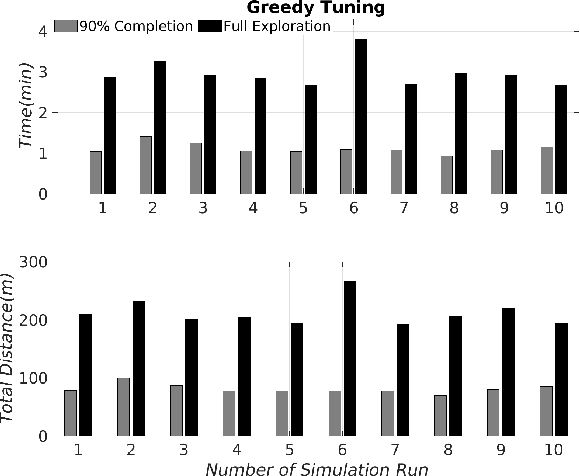
This article establishes the Exploration-RRT algorithm: A novel general-purpose combined exploration and pathplanning algorithm, based on a multi-goal Rapidly-Exploring Random Trees (RRT) framework. Exploration-RRT (ERRT) has been specifically designed for utilization in 3D exploration missions, with partially or completely unknown and unstructured environments. The novel proposed ERRT is based on a multi-objective optimization framework and it is able to take under consideration the potential information gain, the distance travelled, and the actuation costs, along trajectories to pseudo-random goals, generated from considering the on-board sensor model and the non-linear model of the utilized platform. In this article, the algorithmic pipeline of the ERRT will be established and the overall applicability and efficiency of the proposed scheme will be presented on an application with an Unmanned Aerial Vehicle (UAV) model, equipped with a 3D lidar, in a simulated operating environment, with the goal of exploring a completely unknown area as efficiently and quickly as possible
Towards Robust State Estimation by Boosting the Maximum Correntropy Criterion Kalman Filter with Adaptive Behaviors
Mar 29, 2021
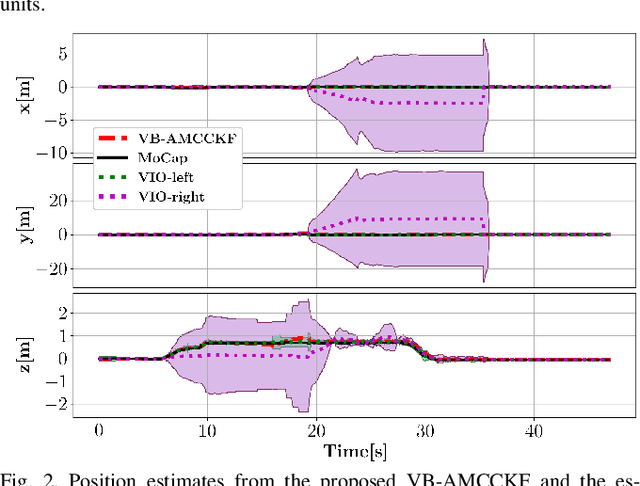
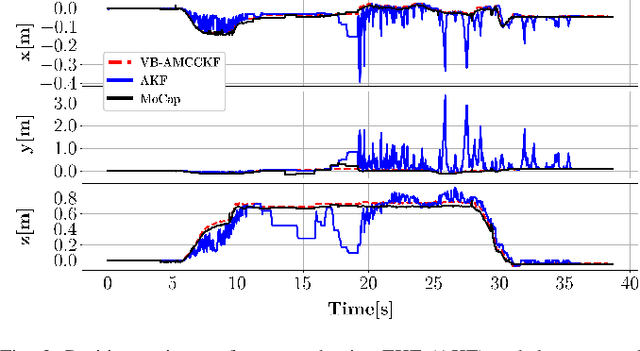
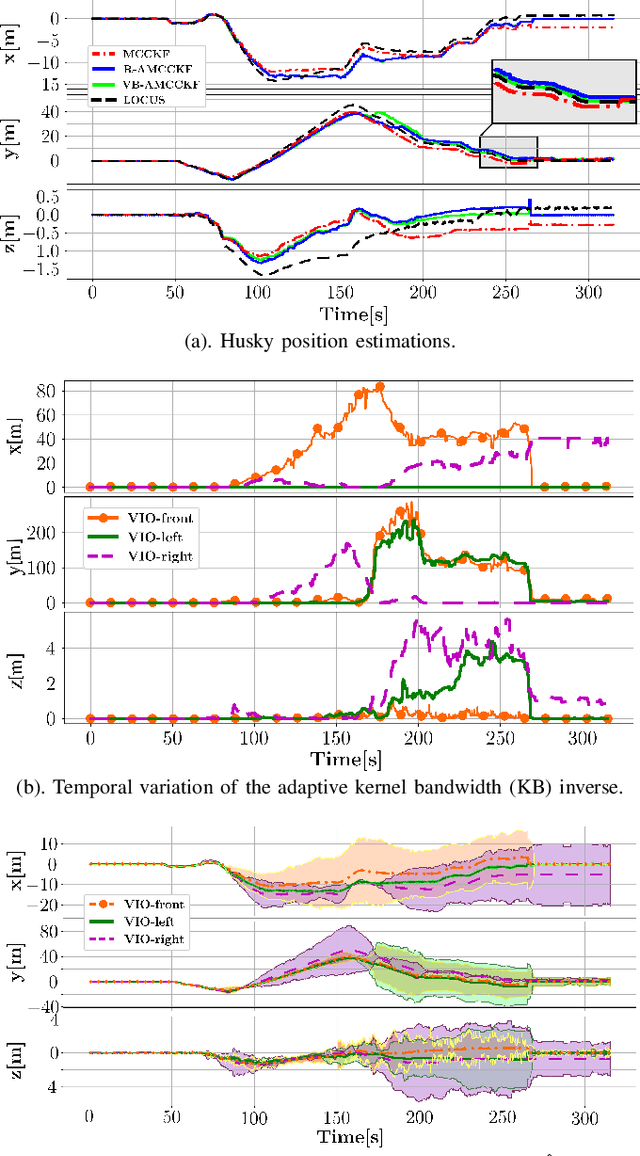
This work proposes a resilient and adaptive state estimation framework for robots operating in perceptually-degraded environments. The approach, called Adaptive Maximum Correntropy Criterion Kalman Filtering (AMCCKF), is inherently robust to corrupted measurements, such as those containing jumps or general non-Gaussian noise, and is able to modify filter parameters online to improve performance. Two separate methods are developed -- the Variational Bayesian AMCCKF (VB-AMCCKF) and Residual AMCCKF (R-AMCCKF) -- that modify the process and measurement noise models in addition to the bandwidth of the kernel function used in MCCKF based on the quality of measurements received. The two approaches differ in computational complexity and overall performance which is experimentally analyzed. The method is demonstrated in real experiments on both aerial and ground robots and is part of the solution used by the COSTAR team participating at the DARPA Subterranean Challenge.
Robust Collision-free Lightweight Aerial Autonomy for Unknown Area Exploration
Mar 16, 2021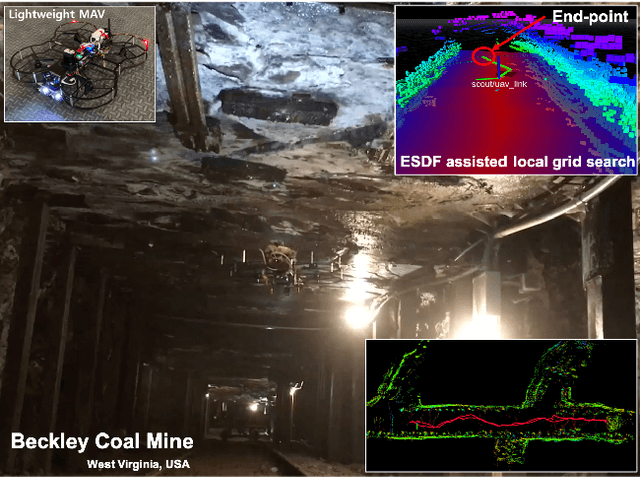
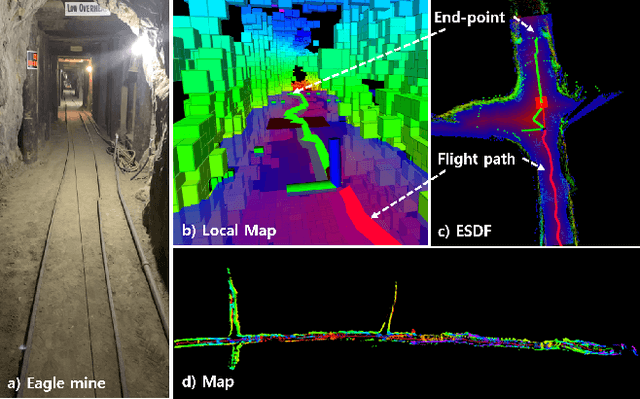
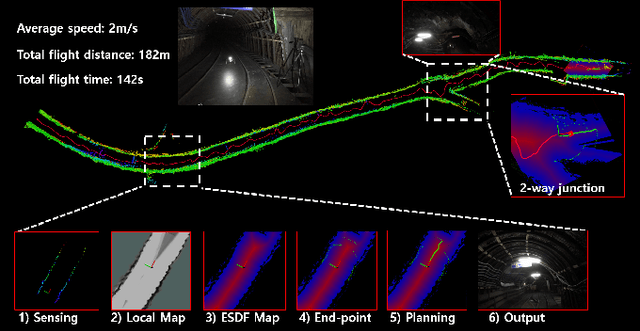
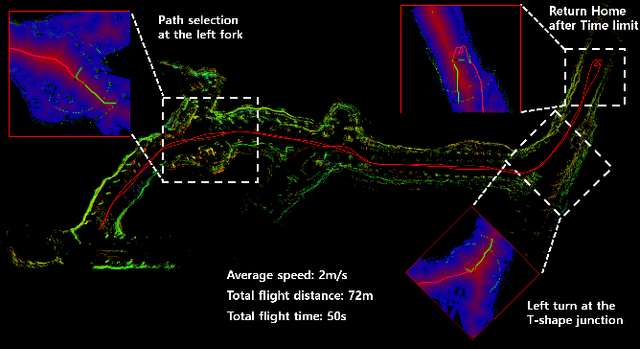
Collision-free path planning is an essential requirement for autonomous exploration in unknown environments, especially when operating in confined spaces or near obstacles. This study presents an autonomous exploration technique using a small drone. A local end-point selection method is designed using LiDAR range measurement and then generates the path from the current position to the selected end-point. The generated path shows the consistent collision-free path in real-time by adopting the Euclidean signed distance field-based grid-search method. The simulation results consistently showed the safety, and reliability of the proposed path-planning method. Real-world experiments are conducted in three different mines, demonstrating successful autonomous exploration flight in environments with various structural conditions. The results showed the high capability of the proposed flight autonomy framework for lightweight aerial-robot systems. Besides, our drone performs an autonomous mission during our entry at the Tunnel Circuit competition (Phase 1) of the DARPA Subterranean Challenge.
PLGRIM: Hierarchical Value Learning for Large-scale Exploration in Unknown Environments
Feb 10, 2021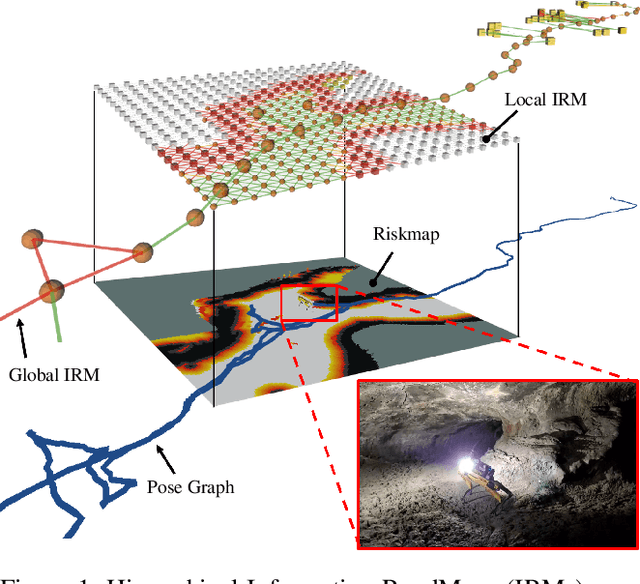
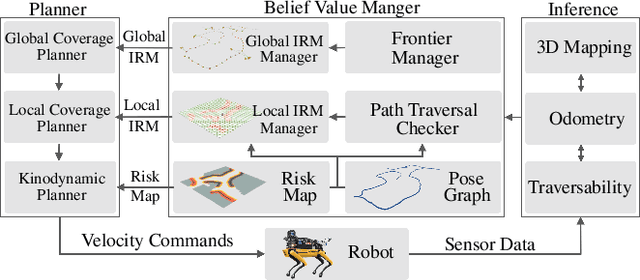
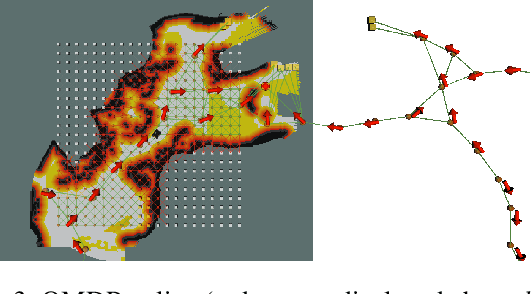
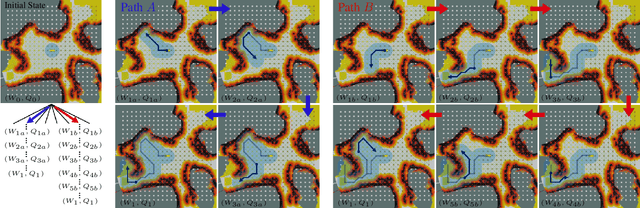
In order for a robot to explore an unknown environment autonomously, it must account for uncertainty in sensor measurements, hazard assessment, localization, and motion execution. Making decisions for maximal reward in a stochastic setting requires learning values and constructing policies over a belief space, i.e., probability distribution of the robot-world state. Value learning over belief spaces suffer from computational challenges in high-dimensional spaces, such as large spatial environments and long temporal horizons for exploration. At the same time, it should be adaptive and resilient to disturbances at run time in order to ensure the robot's safety, as required in many real-world applications. This work proposes a scalable value learning framework, PLGRIM (Probabilistic Local and Global Reasoning on Information roadMaps), that bridges the gap between (i) local, risk-aware resiliency and (ii) global, reward-seeking mission objectives. By leveraging hierarchical belief space planners with information-rich graph structures, PLGRIM can address large-scale exploration problems while providing locally near-optimal coverage plans. PLGRIM is a step toward enabling belief space planners on physical robots operating in unknown and complex environments. We validate our proposed framework with a high-fidelity dynamic simulation in diverse environments and with physical hardware, Boston Dynamics' Spot robot, in a lava tube.
DARE-SLAM: Degeneracy-Aware and Resilient Loop Closing in Perceptually-Degraded Environments
Feb 09, 2021
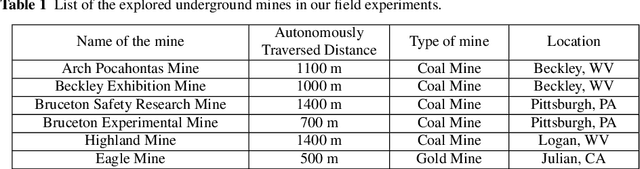
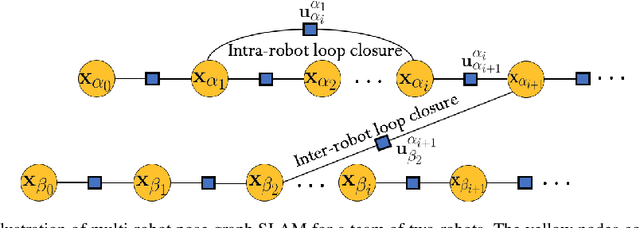
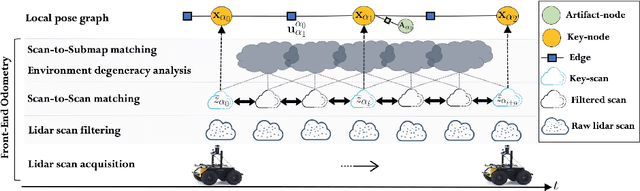
Enabling fully autonomous robots capable of navigating and exploring large-scale, unknown and complex environments has been at the core of robotics research for several decades. A key requirement in autonomous exploration is building accurate and consistent maps of the unknown environment that can be used for reliable navigation. Loop closure detection, the ability to assert that a robot has returned to a previously visited location, is crucial for consistent mapping as it reduces the drift caused by error accumulation in the estimated robot trajectory. Moreover, in multi-robot systems, loop closures enable merging local maps obtained by a team of robots into a consistent global map of the environment. In this paper, we present a degeneracy-aware and drift-resilient loop closing method to improve place recognition and resolve 3D location ambiguities for simultaneous localization and mapping (SLAM) in GPS-denied, large-scale and perceptually-degraded environments. More specifically, we focus on SLAM in subterranean environments (e.g., lava tubes, caves, and mines) that represent examples of complex and ambiguous environments where current methods have inadequate performance.