 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning All-Terrain Locomotion for a Planetary Rover with Actively Articulated Suspension
Jun 05, 2026This paper presents ERNEST, a four-wheeled planetary rover concept equipped with a two-degree-of-freedom Active Gimbal Suspension that combines yaw and roll actuation to enable wheel reconfiguration, steering, and active load redistribution. A single neural network controller, trained to track a desired path across challenging terrain, fully unlocks the capabilities of this actuated suspension system for autonomous obstacle negotiation. A reinforcement learning framework is developed using the high-fidelity DARTS simulation engine, which combines rigid-contact dynamics and Bekker-Wong terramechanics, enabling the emergence of locomotion strategies adapted to loose-soil conditions. To obtain a single unified controller across heterogeneous terrains, a policy consolidation strategy merges the experience of terrain-specialized agents into one neural network, eliminating the need for explicit terrain classification and controller switching. The resulting controller operates on a combination of proprioceptive and exteroceptive feedback, including sparse stereo-derived terrain elevation, chassis attitude, joint states, and force-torque measurements. Zero-shot transfer to the physical rover is achieved through domain randomization, sensor noise injection, and model-to-real system identification. Experimental results demonstrate autonomous traversal of rock fields, a bump trap, a wheel-high step, sand ripples, and sandy slopes. On a 20° sandy slope, the learned controller reduces the cost of transport by 37% on dry sand despite the additional actuation, and achieves superior performance on wet sand where the passive suspension becomes completely immobilized.
BEVIO: Efficient Bird's-Eye-View based Sparse-Update Visual-Inertial Odometry for Lunar Day-Night Navigation
May 30, 2026Visual-Inertial Odometry (VIO) provides smooth, high-rate state estimates and has been widely used for robotic navigation in both terrestrial and planetary applications. However, its performance is typically dependent on the frequency of visual updates, which is a challenge for planetary rovers operating under extreme resource constraints and low frame rates. This work investigates enabling reliable VIO with very sparse visual updates for lunar rover applications, addressing both day and night-time operations where feature associations become especially difficult under self-illumination conditions. We propose a Bird's Eye View (BEV)-based image matching scheme that remains robust to larger inter-frame motions and more reliable feature matching despite significant visual appearance changes. We extensively evaluate our proposed approach, BEVIO, through high-fidelity photorealistic lunar and real-time robotic experiments conducted using a half-scale lunar rover, in a long-term day-night deployment at Plaster City, CA, USA. The results demonstrate that our method enables reliable day and nighttime self-illuminated traverses at visual update rates as low as 0.25 Hz, underscoring its suitability for navigation on power- and compute-limited lunar rovers.
Risk-aware Integrated Task and Motion Planning for Versatile Snake Robots under Localization Failures
Feb 27, 2025



Snake robots enable mobility through extreme terrains and confined environments in terrestrial and space applications. However, robust perception and localization for snake robots remain an open challenge due to the proximity of the sensor payload to the ground coupled with a limited field of view. To address this issue, we propose Blind-motion with Intermittently Scheduled Scans (BLISS) which combines proprioception-only mobility with intermittent scans to be resilient against both localization failures and collision risks. BLISS is formulated as an integrated Task and Motion Planning (TAMP) problem that leads to a Chance-Constrained Hybrid Partially Observable Markov Decision Process (CC-HPOMDP), known to be computationally intractable due to the curse of history. Our novelty lies in reformulating CC-HPOMDP as a tractable, convex Mixed Integer Linear Program. This allows us to solve BLISS-TAMP significantly faster and jointly derive optimal task-motion plans. Simulations and hardware experiments on the EELS snake robot show our method achieves over an order of magnitude computational improvement compared to state-of-the-art POMDP planners and $>$ 50\% better navigation time optimality versus classical two-stage planners.
Autonomous Off-road Navigation over Extreme Terrains with Perceptually-challenging Conditions
Jan 26, 2021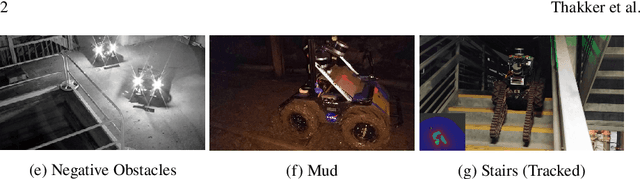
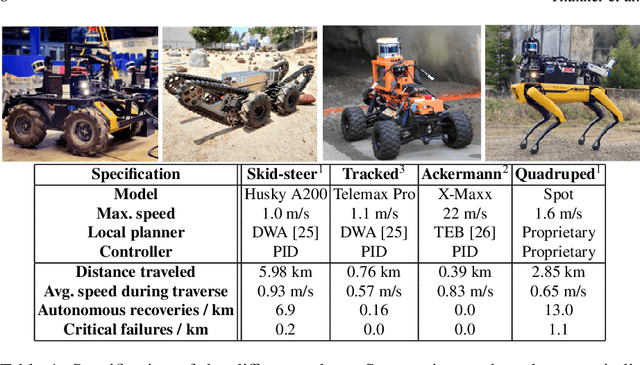
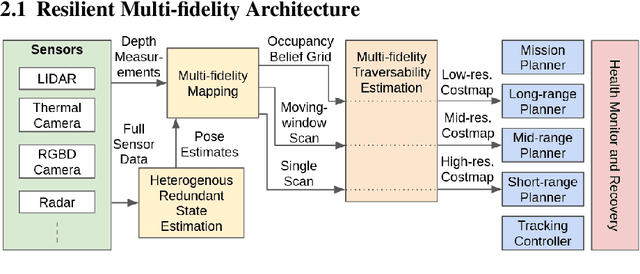
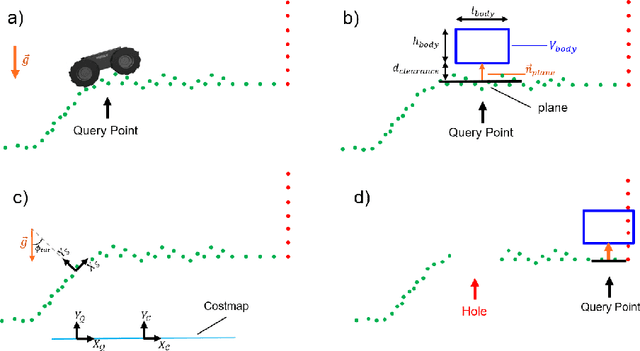
We propose a framework for resilient autonomous navigation in perceptually challenging unknown environments with mobility-stressing elements such as uneven surfaces with rocks and boulders, steep slopes, negative obstacles like cliffs and holes, and narrow passages. Environments are GPS-denied and perceptually-degraded with variable lighting from dark to lit and obscurants (dust, fog, smoke). Lack of prior maps and degraded communication eliminates the possibility of prior or off-board computation or operator intervention. This necessitates real-time on-board computation using noisy sensor data. To address these challenges, we propose a resilient architecture that exploits redundancy and heterogeneity in sensing modalities. Further resilience is achieved by triggering recovery behaviors upon failure. We propose a fast settling algorithm to generate robust multi-fidelity traversability estimates in real-time. The proposed approach was deployed on multiple physical systems including skid-steer and tracked robots, a high-speed RC car and legged robots, as a part of Team CoSTAR's effort to the DARPA Subterranean Challenge, where the team won 2nd and 1st place in the Tunnel and Urban Circuits, respectively.