 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStepAudio 2.5 Technical Report
May 22, 2026Unified audio-language modeling has emerged as a prominent trend in modern speech systems, promising to bring the reasoning capabilities of large language models to auditory tasks. However, existing unified foundations often struggle to match the depth of specialized systems across automatic speech recognition (ASR), text-to-speech synthesis (TTS), and realtime spoken interaction. Bridging this gap remains an open challenge. This report presents StepAudio 2.5, a unified audio-language foundation model that matches or exceeds specialized systems across all three capabilities. Rather than treating these tasks as architecturally distinct, we operate on the premise that once text and audio share a multimodal representational space, task specialization becomes a matter of operational regimes: data construction, optimization targets, and decoding constraints. Guided by this insight, we advance the post-training paradigm from standard supervised learning to task-tailored Reinforcement Learning from Human Feedback (RLHF), using it as the primary mechanism to define complex optimization targets. We leverage this RLHF-centric alignment, alongside specialized decoding, to shape a shared backbone into three distinct operational modes. Concretely, the ASR branch advances transcription efficiency via verifiable multi-token decoding; the TTS branch achieves controllable, expressive synthesis through preference-based RLHF and context-rich supervision; and the Realtime branch realizes low-latency, persona-consistent dialogue via generative reward modeling within an RLHF framework. On standard benchmarks, StepAudio 2.5 achieves state-of-the-art results across ASR, TTS, and Realtime, demonstrating that a singular audio-language foundation can successfully internalize the distinct deployment objectives of speech understanding, generation, and live interaction.
Step 3.5 Flash: Open Frontier-Level Intelligence with 11B Active Parameters
Feb 11, 2026We introduce Step 3.5 Flash, a sparse Mixture-of-Experts (MoE) model that bridges frontier-level agentic intelligence and computational efficiency. We focus on what matters most when building agents: sharp reasoning and fast, reliable execution. Step 3.5 Flash pairs a 196B-parameter foundation with 11B active parameters for efficient inference. It is optimized with interleaved 3:1 sliding-window/full attention and Multi-Token Prediction (MTP-3) to reduce the latency and cost of multi-round agentic interactions. To reach frontier-level intelligence, we design a scalable reinforcement learning framework that combines verifiable signals with preference feedback, while remaining stable under large-scale off-policy training, enabling consistent self-improvement across mathematics, code, and tool use. Step 3.5 Flash demonstrates strong performance across agent, coding, and math tasks, achieving 85.4% on IMO-AnswerBench, 86.4% on LiveCodeBench-v6 (2024.08-2025.05), 88.2% on tau2-Bench, 69.0% on BrowseComp (with context management), and 51.0% on Terminal-Bench 2.0, comparable to frontier models such as GPT-5.2 xHigh and Gemini 3.0 Pro. By redefining the efficiency frontier, Step 3.5 Flash provides a high-density foundation for deploying sophisticated agents in real-world industrial environments.
JOintGS: Joint Optimization of Cameras, Bodies and 3D Gaussians for In-the-Wild Monocular Reconstruction
Feb 04, 2026Reconstructing high-fidelity animatable 3D human avatars from monocular RGB videos remains challenging, particularly in unconstrained in-the-wild scenarios where camera parameters and human poses from off-the-shelf methods (e.g., COLMAP, HMR2.0) are often inaccurate. Splatting (3DGS) advances demonstrate impressive rendering quality and real-time performance, they critically depend on precise camera calibration and pose annotations, limiting their applicability in real-world settings. We present JOintGS, a unified framework that jointly optimizes camera extrinsics, human poses, and 3D Gaussian representations from coarse initialization through a synergistic refinement mechanism. Our key insight is that explicit foreground-background disentanglement enables mutual reinforcement: static background Gaussians anchor camera estimation via multi-view consistency; refined cameras improve human body alignment through accurate temporal correspondence; optimized human poses enhance scene reconstruction by removing dynamic artifacts from static constraints. We further introduce a temporal dynamics module to capture fine-grained pose-dependent deformations and a residual color field to model illumination variations. Extensive experiments on NeuMan and EMDB datasets demonstrate that JOintGS achieves superior reconstruction quality, with 2.1~dB PSNR improvement over state-of-the-art methods on NeuMan dataset, while maintaining real-time rendering. Notably, our method shows significantly enhanced robustness to noisy initialization compared to the baseline.Our source code is available at https://github.com/MiliLab/JOintGS.
STEP3-VL-10B Technical Report
Jan 15, 2026We present STEP3-VL-10B, a lightweight open-source foundation model designed to redefine the trade-off between compact efficiency and frontier-level multimodal intelligence. STEP3-VL-10B is realized through two strategic shifts: first, a unified, fully unfrozen pre-training strategy on 1.2T multimodal tokens that integrates a language-aligned Perception Encoder with a Qwen3-8B decoder to establish intrinsic vision-language synergy; and second, a scaled post-training pipeline featuring over 1k iterations of reinforcement learning. Crucially, we implement Parallel Coordinated Reasoning (PaCoRe) to scale test-time compute, allocating resources to scalable perceptual reasoning that explores and synthesizes diverse visual hypotheses. Consequently, despite its compact 10B footprint, STEP3-VL-10B rivals or surpasses models 10$\times$-20$\times$ larger (e.g., GLM-4.6V-106B, Qwen3-VL-235B) and top-tier proprietary flagships like Gemini 2.5 Pro and Seed-1.5-VL. Delivering best-in-class performance, it records 92.2% on MMBench and 80.11% on MMMU, while excelling in complex reasoning with 94.43% on AIME2025 and 75.95% on MathVision. We release the full model suite to provide the community with a powerful, efficient, and reproducible baseline.
InpaintHuman: Reconstructing Occluded Humans with Multi-Scale UV Mapping and Identity-Preserving Diffusion Inpainting
Jan 05, 2026Reconstructing complete and animatable 3D human avatars from monocular videos remains challenging, particularly under severe occlusions. While 3D Gaussian Splatting has enabled photorealistic human rendering, existing methods struggle with incomplete observations, often producing corrupted geometry and temporal inconsistencies. We present InpaintHuman, a novel method for generating high-fidelity, complete, and animatable avatars from occluded monocular videos. Our approach introduces two key innovations: (i) a multi-scale UV-parameterized representation with hierarchical coarse-to-fine feature interpolation, enabling robust reconstruction of occluded regions while preserving geometric details; and (ii) an identity-preserving diffusion inpainting module that integrates textual inversion with semantic-conditioned guidance for subject-specific, temporally coherent completion. Unlike SDS-based methods, our approach employs direct pixel-level supervision to ensure identity fidelity. Experiments on synthetic benchmarks (PeopleSnapshot, ZJU-MoCap) and real-world scenarios (OcMotion) demonstrate competitive performance with consistent improvements in reconstruction quality across diverse poses and viewpoints.
FMGS-Avatar: Mesh-Guided 2D Gaussian Splatting with Foundation Model Priors for 3D Monocular Avatar Reconstruction
Sep 18, 2025Reconstructing high-fidelity animatable human avatars from monocular videos remains challenging due to insufficient geometric information in single-view observations. While recent 3D Gaussian Splatting methods have shown promise, they struggle with surface detail preservation due to the free-form nature of 3D Gaussian primitives. To address both the representation limitations and information scarcity, we propose a novel method, \textbf{FMGS-Avatar}, that integrates two key innovations. First, we introduce Mesh-Guided 2D Gaussian Splatting, where 2D Gaussian primitives are attached directly to template mesh faces with constrained position, rotation, and movement, enabling superior surface alignment and geometric detail preservation. Second, we leverage foundation models trained on large-scale datasets, such as Sapiens, to complement the limited visual cues from monocular videos. However, when distilling multi-modal prior knowledge from foundation models, conflicting optimization objectives can emerge as different modalities exhibit distinct parameter sensitivities. We address this through a coordinated training strategy with selective gradient isolation, enabling each loss component to optimize its relevant parameters without interference. Through this combination of enhanced representation and coordinated information distillation, our approach significantly advances 3D monocular human avatar reconstruction. Experimental evaluation demonstrates superior reconstruction quality compared to existing methods, with notable gains in geometric accuracy and appearance fidelity while providing rich semantic information. Additionally, the distilled prior knowledge within a shared canonical space naturally enables spatially and temporally consistent rendering under novel views and poses.
Step-Audio 2 Technical Report
Jul 24, 2025
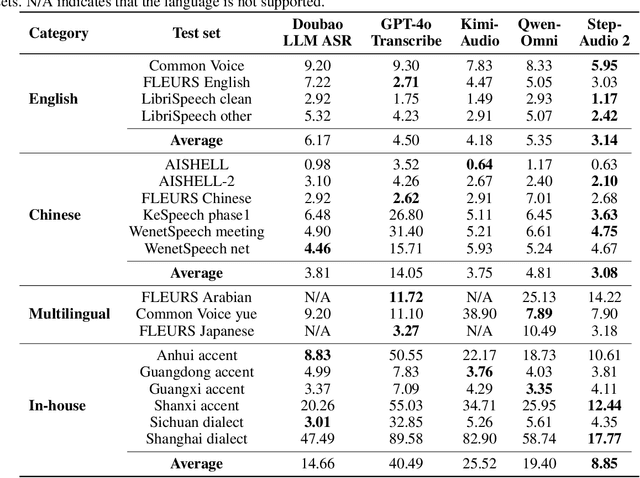

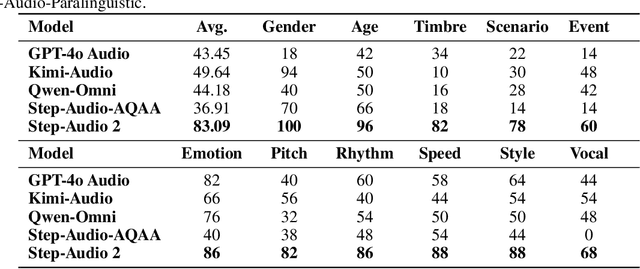
This paper presents Step-Audio 2, an end-to-end multi-modal large language model designed for industry-strength audio understanding and speech conversation. By integrating a latent audio encoder and reasoning-centric reinforcement learning (RL), Step-Audio 2 achieves promising performance in automatic speech recognition (ASR) and audio understanding. To facilitate genuine end-to-end speech conversation, Step-Audio 2 incorporates the generation of discrete audio tokens into language modeling, significantly enhancing its responsiveness to paralinguistic information such as speaking styles and emotions. To effectively leverage the rich textual and acoustic knowledge in real-world data, Step-Audio 2 integrates retrieval-augmented generation (RAG) and is able to call external tools such as web search to mitigate hallucination and audio search to switch timbres. Trained on millions of hours of speech and audio data, Step-Audio 2 delivers intelligence and expressiveness across diverse conversational scenarios. Evaluation results demonstrate that Step-Audio 2 achieves state-of-the-art performance on various audio understanding and conversational benchmarks compared to other open-source and commercial solutions. Please visit https://github.com/stepfun-ai/Step-Audio2 for more information.
Step-Audio-AQAA: a Fully End-to-End Expressive Large Audio Language Model
Jun 10, 2025



Large Audio-Language Models (LALMs) have significantly advanced intelligent human-computer interaction, yet their reliance on text-based outputs limits their ability to generate natural speech responses directly, hindering seamless audio interactions. To address this, we introduce Step-Audio-AQAA, a fully end-to-end LALM designed for Audio Query-Audio Answer (AQAA) tasks. The model integrates a dual-codebook audio tokenizer for linguistic and semantic feature extraction, a 130-billion-parameter backbone LLM and a neural vocoder for high-fidelity speech synthesis. Our post-training approach employs interleaved token-output of text and audio to enhance semantic coherence and combines Direct Preference Optimization (DPO) with model merge to improve performance. Evaluations on the StepEval-Audio-360 benchmark demonstrate that Step-Audio-AQAA excels especially in speech control, outperforming the state-of-art LALMs in key areas. This work contributes a promising solution for end-to-end LALMs and highlights the critical role of token-based vocoder in enhancing overall performance for AQAA tasks.
LocoTouch: Learning Dexterous Quadrupedal Transport with Tactile Sensing
May 29, 2025Quadrupedal robots have demonstrated remarkable agility and robustness in traversing complex terrains. However, they remain limited in performing object interactions that require sustained contact. In this work, we present LocoTouch, a system that equips quadrupedal robots with tactile sensing to address a challenging task in this category: long-distance transport of unsecured cylindrical objects, which typically requires custom mounting mechanisms to maintain stability. For efficient large-area tactile sensing, we design a high-density distributed tactile sensor array that covers the entire back of the robot. To effectively leverage tactile feedback for locomotion control, we develop a simulation environment with high-fidelity tactile signals, and train tactile-aware transport policies using a two-stage learning pipeline. Furthermore, we design a novel reward function to promote stable, symmetric, and frequency-adaptive locomotion gaits. After training in simulation, LocoTouch transfers zero-shot to the real world, reliably balancing and transporting a wide range of unsecured, cylindrical everyday objects with broadly varying sizes and weights. Thanks to the responsiveness of the tactile sensor and the adaptive gait reward, LocoTouch can robustly balance objects with slippery surfaces over long distances, or even under severe external perturbations.
Sampling-Based System Identification with Active Exploration for Legged Robot Sim2Real Learning
May 20, 2025Sim-to-real discrepancies hinder learning-based policies from achieving high-precision tasks in the real world. While Domain Randomization (DR) is commonly used to bridge this gap, it often relies on heuristics and can lead to overly conservative policies with degrading performance when not properly tuned. System Identification (Sys-ID) offers a targeted approach, but standard techniques rely on differentiable dynamics and/or direct torque measurement, assumptions that rarely hold for contact-rich legged systems. To this end, we present SPI-Active (Sampling-based Parameter Identification with Active Exploration), a two-stage framework that estimates physical parameters of legged robots to minimize the sim-to-real gap. SPI-Active robustly identifies key physical parameters through massive parallel sampling, minimizing state prediction errors between simulated and real-world trajectories. To further improve the informativeness of collected data, we introduce an active exploration strategy that maximizes the Fisher Information of the collected real-world trajectories via optimizing the input commands of an exploration policy. This targeted exploration leads to accurate identification and better generalization across diverse tasks. Experiments demonstrate that SPI-Active enables precise sim-to-real transfer of learned policies to the real world, outperforming baselines by 42-63% in various locomotion tasks.