 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Visual-Language-Action Model Scaling: Alignment, Mixture, and Regularization
Feb 10, 2026While Vision-Language-Action (VLA) models show strong promise for generalist robot control, it remains unclear whether -- and under what conditions -- the standard "scale data" recipe translates to robotics, where training data is inherently heterogeneous across embodiments, sensors, and action spaces. We present a systematic, controlled study of VLA scaling that revisits core training choices for pretraining across diverse robots. Using a representative VLA framework that combines a vision-language backbone with flow-matching, we ablate key design decisions under matched conditions and evaluate in extensive simulation and real-robot experiments. To improve the reliability of real-world results, we introduce a Grouped Blind Ensemble protocol that blinds operators to model identity and separates policy execution from outcome judgment, reducing experimenter bias. Our analysis targets three dimensions of VLA scaling. (1) Physical alignment: we show that a unified end-effector (EEF)-relative action representation is critical for robust cross-embodiment transfer. (2) Embodiment mixture: we find that naively pooling heterogeneous robot datasets often induces negative transfer rather than gains, underscoring the fragility of indiscriminate data scaling. (3) Training regularization: we observe that intuitive strategies, such as sensory dropout and multi-stage fine-tuning, do not consistently improve performance at scale. Together, this study challenge some common assumptions about embodied scaling and provide practical guidance for training large-scale VLA policies from diverse robotic data. Project website: https://research.beingbeyond.com/rethink_vla
TwistNet-2D: Learning Second-Order Channel Interactions via Spiral Twisting for Texture Recognition
Feb 06, 2026Second-order feature statistics are central to texture recognition, yet current methods face a fundamental tension: bilinear pooling and Gram matrices capture global channel correlations but collapse spatial structure, while self-attention models spatial context through weighted aggregation rather than explicit pairwise feature interactions. We introduce TwistNet-2D, a lightweight module that computes \emph{local} pairwise channel products under directional spatial displacement, jointly encoding where features co-occur and how they interact. The core component, Spiral-Twisted Channel Interaction (STCI), shifts one feature map along a prescribed direction before element-wise channel multiplication, thereby capturing the cross-position co-occurrence patterns characteristic of structured and periodic textures. Aggregating four directional heads with learned channel reweighting and injecting the result through a sigmoid-gated residual path, \TwistNet incurs only 3.5% additional parameters and 2% additional FLOPs over ResNet-18, yet consistently surpasses both parameter-matched and substantially larger baselines -- including ConvNeXt, Swin Transformer, and hybrid CNN--Transformer architectures -- across four texture and fine-grained recognition benchmarks.
A Quantum-Driven Evolutionary Framework for Solving High-Dimensional Sharpe Ratio Portfolio Optimization
Jan 16, 2026High-dimensional portfolio optimization faces significant computational challenges under complex constraints, with traditional optimization methods struggling to balance convergence speed and global exploration capability. To address this, firstly, we introduce an enhanced Sharpe ratio-based model that incorporates all constraints into the objective function using adaptive penalty terms, transforming the original constrained problem into an unconstrained single-objective formulation. This approach preserves financial interpretability while simplifying algorithmic implementation. To efficiently solve the resulting high-dimensional optimization problem, we propose a Quantum Hybrid Differential Evolution (QHDE) algorithm, which integrates Quantum-inspired probabilistic behavior into the standard DE framework. QHDE employs a Schrodinger-inspired probabilistic mechanism for population evolution, enabling more flexible and diversified solution updates. To further enhance performance, a good point set-chaos reverse learning strategy is adopted to generate a well-dispersed initial population, and a dynamic elite pool combined with Cauchy-Gaussian hybrid perturbations strengthens global exploration and mitigates premature convergence. Experimental validation on CEC benchmarks and real-world portfolios involving 20 to 80 assets demonstrates that QHDE's performance improves by up to 73.4%. It attains faster convergence, higher solution precision, and greater robustness than seven state-of-the-art counterparts, thereby confirming its suitability for complex, high-dimensional portfolio optimization and advancing quantum-inspired evolutionary research in computational finance.
LightTact: A Visual-Tactile Fingertip Sensor for Deformation-Independent Contact Sensing
Dec 23, 2025Contact often occurs without macroscopic surface deformation, such as during interaction with liquids, semi-liquids, or ultra-soft materials. Most existing tactile sensors rely on deformation to infer contact, making such light-contact interactions difficult to perceive robustly. To address this, we present LightTact, a visual-tactile fingertip sensor that makes contact directly visible via a deformation-independent, optics-based principle. LightTact uses an ambient-blocking optical configuration that suppresses both external light and internal illumination at non-contact regions, while transmitting only the diffuse light generated at true contacts. As a result, LightTact produces high-contrast raw images in which non-contact pixels remain near-black (mean gray value < 3) and contact pixels preserve the natural appearance of the contacting surface. Built on this, LightTact achieves accurate pixel-level contact segmentation that is robust to material properties, contact force, surface appearance, and environmental lighting. We further integrate LightTact on a robotic arm and demonstrate manipulation behaviors driven by extremely light contact, including water spreading, facial-cream dipping, and thin-film interaction. Finally, we show that LightTact's spatially aligned visual-tactile images can be directly interpreted by existing vision-language models, enabling resistor value reasoning for robotic sorting.
OPAL: Operator-Programmed Algorithms for Landscape-Aware Black-Box Optimization
Dec 14, 2025Black-box optimization often relies on evolutionary and swarm algorithms whose performance is highly problem dependent. We view an optimizer as a short program over a small vocabulary of search operators and learn this operator program separately for each problem instance. We instantiate this idea in Operator-Programmed Algorithms (OPAL), a landscape-aware framework for continuous black-box optimization that uses a small design budget with a standard differential evolution baseline to probe the landscape, builds a $k$-nearest neighbor graph over sampled points, and encodes this trajectory with a graph neural network. A meta-learner then maps the resulting representation to a phase-wise schedule of exploration, restart, and local search operators. On the CEC~2017 test suite, a single meta-trained OPAL policy is statistically competitive with state-of-the-art adaptive differential evolution variants and achieves significant improvements over simpler baselines under nonparametric tests. Ablation studies on CEC~2017 justify the choices for the design phase, the trajectory graph, and the operator-program representation, while the meta-components add only modest wall-clock overhead. Overall, the results indicate that operator-programmed, landscape-aware per-instance design is a practical way forward beyond ad hoc metaphor-based algorithms in black-box optimization.
A Quantum Tunneling and Bio-Phototactic Driven Enhanced Dwarf Mongoose Optimizer for UAV Trajectory Planning and Engineering Problem
Nov 12, 2025With the widespread adoption of unmanned aerial vehicles (UAV), effective path planning has become increasingly important. Although traditional search methods have been extensively applied, metaheuristic algorithms have gained popularity due to their efficiency and problem-specific heuristics. However, challenges such as premature convergence and lack of solution diversity still hinder their performance in complex scenarios. To address these issues, this paper proposes an Enhanced Multi-Strategy Dwarf Mongoose Optimization (EDMO) algorithm, tailored for three-dimensional UAV trajectory planning in dynamic and obstacle-rich environments. EDMO integrates three novel strategies: (1) a Dynamic Quantum Tunneling Optimization Strategy (DQTOS) to enable particles to probabilistically escape local optima; (2) a Bio-phototactic Dynamic Focusing Search Strategy (BDFSS) inspired by microbial phototaxis for adaptive local refinement; and (3) an Orthogonal Lens Opposition-Based Learning (OLOBL) strategy to enhance global exploration through structured dimensional recombination. EDMO is benchmarked on 39 standard test functions from CEC2017 and CEC2020, outperforming 14 advanced algorithms in convergence speed, robustness, and optimization accuracy. Furthermore, real-world validations on UAV three-dimensional path planning and three engineering design tasks confirm its practical applicability and effectiveness in field robotics missions requiring intelligent, adaptive, and time-efficient planning.
LocoTouch: Learning Dexterous Quadrupedal Transport with Tactile Sensing
May 29, 2025Quadrupedal robots have demonstrated remarkable agility and robustness in traversing complex terrains. However, they remain limited in performing object interactions that require sustained contact. In this work, we present LocoTouch, a system that equips quadrupedal robots with tactile sensing to address a challenging task in this category: long-distance transport of unsecured cylindrical objects, which typically requires custom mounting mechanisms to maintain stability. For efficient large-area tactile sensing, we design a high-density distributed tactile sensor array that covers the entire back of the robot. To effectively leverage tactile feedback for locomotion control, we develop a simulation environment with high-fidelity tactile signals, and train tactile-aware transport policies using a two-stage learning pipeline. Furthermore, we design a novel reward function to promote stable, symmetric, and frequency-adaptive locomotion gaits. After training in simulation, LocoTouch transfers zero-shot to the real world, reliably balancing and transporting a wide range of unsecured, cylindrical everyday objects with broadly varying sizes and weights. Thanks to the responsiveness of the tactile sensor and the adaptive gait reward, LocoTouch can robustly balance objects with slippery surfaces over long distances, or even under severe external perturbations.
Distribution Context Aware Loss for Person Re-identification
Nov 17, 2019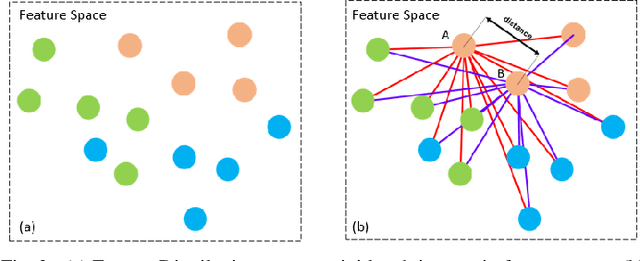
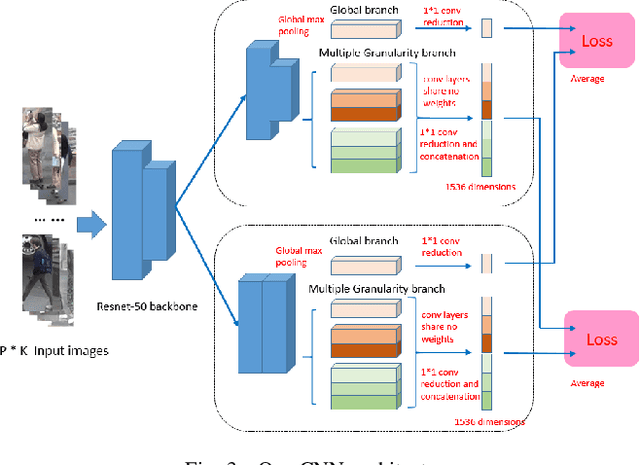
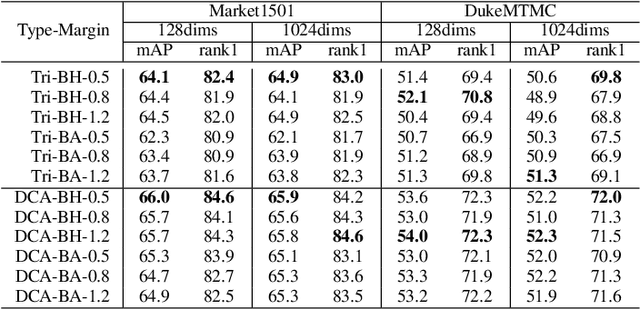
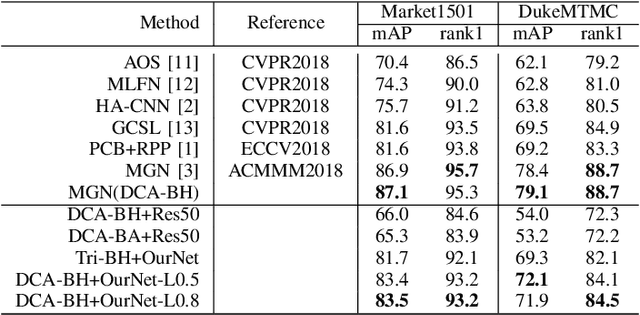
To learn the optimal similarity function between probe and gallery images in Person re-identification, effective deep metric learning methods have been extensively explored to obtain discriminative feature embedding. However, existing metric loss like triplet loss and its variants always emphasize pair-wise relations but ignore the distribution context in feature space, leading to inconsistency and sub-optimal. In fact, the similarity of one pair not only decides the match of this pair, but also has potential impacts on other sample pairs. In this paper, we propose a novel Distribution Context Aware (DCA) loss based on triplet loss to combine both numerical similarity and relation similarity in feature space for better clustering. Extensive experiments on three benchmarks including Market-1501, DukeMTMC-reID and MSMT17, evidence the favorable performance of our method against the corresponding baseline and other state-of-the-art methods.