 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAPID^3: Tri-Level Reinforced Acceleration Policies for Diffusion Transformer
Sep 26, 2025Diffusion Transformers (DiTs) excel at visual generation yet remain hampered by slow sampling. Existing training-free accelerators - step reduction, feature caching, and sparse attention - enhance inference speed but typically rely on a uniform heuristic or a manually designed adaptive strategy for all images, leaving quality on the table. Alternatively, dynamic neural networks offer per-image adaptive acceleration, but their high fine-tuning costs limit broader applicability. To address these limitations, we introduce RAPID3: Tri-Level Reinforced Acceleration Policies for Diffusion Transformers, a framework that delivers image-wise acceleration with zero updates to the base generator. Specifically, three lightweight policy heads - Step-Skip, Cache-Reuse, and Sparse-Attention - observe the current denoising state and independently decide their corresponding speed-up at each timestep. All policy parameters are trained online via Group Relative Policy Optimization (GRPO) while the generator remains frozen. Meanwhile, an adversarially learned discriminator augments the reward signal, discouraging reward hacking by boosting returns only when generated samples stay close to the original model's distribution. Across state-of-the-art DiT backbones, including Stable Diffusion 3 and FLUX, RAPID3 achieves nearly 3x faster sampling with competitive generation quality.
Scalable Solution Methods for Dec-POMDPs with Deterministic Dynamics
Aug 29, 2025



Many high-level multi-agent planning problems, including multi-robot navigation and path planning, can be effectively modeled using deterministic actions and observations. In this work, we focus on such domains and introduce the class of Deterministic Decentralized POMDPs (Det-Dec-POMDPs). This is a subclass of Dec-POMDPs characterized by deterministic transitions and observations conditioned on the state and joint actions. We then propose a practical solver called Iterative Deterministic POMDP Planning (IDPP). This method builds on the classic Joint Equilibrium Search for Policies framework and is specifically optimized to handle large-scale Det-Dec-POMDPs that current Dec-POMDP solvers are unable to address efficiently.
MDK12-Bench: A Comprehensive Evaluation of Multimodal Large Language Models on Multidisciplinary Exams
Aug 09, 2025Multimodal large language models (MLLMs), which integrate language and visual cues for problem-solving, are crucial for advancing artificial general intelligence (AGI). However, current benchmarks for measuring the intelligence of MLLMs suffer from limited scale, narrow coverage, and unstructured knowledge, offering only static and undifferentiated evaluations. To bridge this gap, we introduce MDK12-Bench, a large-scale multidisciplinary benchmark built from real-world K-12 exams spanning six disciplines with 141K instances and 6,225 knowledge points organized in a six-layer taxonomy. Covering five question formats with difficulty and year annotations, it enables comprehensive evaluation to capture the extent to which MLLMs perform over four dimensions: 1) difficulty levels, 2) temporal (cross-year) shifts, 3) contextual shifts, and 4) knowledge-driven reasoning. We propose a novel dynamic evaluation framework that introduces unfamiliar visual, textual, and question form shifts to challenge model generalization while improving benchmark objectivity and longevity by mitigating data contamination. We further evaluate knowledge-point reference-augmented generation (KP-RAG) to examine the role of knowledge in problem-solving. Key findings reveal limitations in current MLLMs in multiple aspects and provide guidance for enhancing model robustness, interpretability, and AI-assisted education.
Partially Observable Monte-Carlo Graph Search
Jul 28, 2025



Currently, large partially observable Markov decision processes (POMDPs) are often solved by sampling-based online methods which interleave planning and execution phases. However, a pre-computed offline policy is more desirable in POMDP applications with time or energy constraints. But previous offline algorithms are not able to scale up to large POMDPs. In this article, we propose a new sampling-based algorithm, the partially observable Monte-Carlo graph search (POMCGS) to solve large POMDPs offline. Different from many online POMDP methods, which progressively develop a tree while performing (Monte-Carlo) simulations, POMCGS folds this search tree on the fly to construct a policy graph, so that computations can be drastically reduced, and users can analyze and validate the policy prior to embedding and executing it. Moreover, POMCGS, together with action progressive widening and observation clustering methods provided in this article, is able to address certain continuous POMDPs. Through experiments, we demonstrate that POMCGS can generate policies on the most challenging POMDPs, which cannot be computed by previous offline algorithms, and these policies' values are competitive compared with the state-of-the-art online POMDP algorithms.
ArtGS:3D Gaussian Splatting for Interactive Visual-Physical Modeling and Manipulation of Articulated Objects
Jul 03, 2025Articulated object manipulation remains a critical challenge in robotics due to the complex kinematic constraints and the limited physical reasoning of existing methods. In this work, we introduce ArtGS, a novel framework that extends 3D Gaussian Splatting (3DGS) by integrating visual-physical modeling for articulated object understanding and interaction. ArtGS begins with multi-view RGB-D reconstruction, followed by reasoning with a vision-language model (VLM) to extract semantic and structural information, particularly the articulated bones. Through dynamic, differentiable 3DGS-based rendering, ArtGS optimizes the parameters of the articulated bones, ensuring physically consistent motion constraints and enhancing the manipulation policy. By leveraging dynamic Gaussian splatting, cross-embodiment adaptability, and closed-loop optimization, ArtGS establishes a new framework for efficient, scalable, and generalizable articulated object modeling and manipulation. Experiments conducted in both simulation and real-world environments demonstrate that ArtGS significantly outperforms previous methods in joint estimation accuracy and manipulation success rates across a variety of articulated objects. Additional images and videos are available on the project website: https://sites.google.com/view/artgs/home
Info-Coevolution: An Efficient Framework for Data Model Coevolution
Jun 09, 2025



Machine learning relies heavily on data, yet the continuous growth of real-world data poses challenges for efficient dataset construction and training. A fundamental yet unsolved question is: given our current model and data, does a new data (sample/batch) need annotation/learning? Conventional approaches retain all available data, leading to non-optimal data and training efficiency. Active learning aims to reduce data redundancy by selecting a subset of samples to annotate, while it increases pipeline complexity and introduces bias. In this work, we propose Info-Coevolution, a novel framework that efficiently enables models and data to coevolve through online selective annotation with no bias. Leveraging task-specific models (and open-source models), it selectively annotates and integrates online and web data to improve datasets efficiently. For real-world datasets like ImageNet-1K, Info-Coevolution reduces annotation and training costs by 32\% without performance loss. It is able to automatically give the saving ratio without tuning the ratio. It can further reduce the annotation ratio to 50\% with semi-supervised learning. We also explore retrieval-based dataset enhancement using unlabeled open-source data. Code is available at https://github.com/NUS-HPC-AI-Lab/Info-Coevolution/.
* V1
AllTracker: Efficient Dense Point Tracking at High Resolution
Jun 08, 2025We introduce AllTracker: a model that estimates long-range point tracks by way of estimating the flow field between a query frame and every other frame of a video. Unlike existing point tracking methods, our approach delivers high-resolution and dense (all-pixel) correspondence fields, which can be visualized as flow maps. Unlike existing optical flow methods, our approach corresponds one frame to hundreds of subsequent frames, rather than just the next frame. We develop a new architecture for this task, blending techniques from existing work in optical flow and point tracking: the model performs iterative inference on low-resolution grids of correspondence estimates, propagating information spatially via 2D convolution layers, and propagating information temporally via pixel-aligned attention layers. The model is fast and parameter-efficient (16 million parameters), and delivers state-of-the-art point tracking accuracy at high resolution (i.e., tracking 768x1024 pixels, on a 40G GPU). A benefit of our design is that we can train on a wider set of datasets, and we find that doing so is crucial for top performance. We provide an extensive ablation study on our architecture details and training recipe, making it clear which details matter most. Our code and model weights are available at https://alltracker.github.io .
SRDiffusion: Accelerate Video Diffusion Inference via Sketching-Rendering Cooperation
May 25, 2025Leveraging the diffusion transformer (DiT) architecture, models like Sora, CogVideoX and Wan have achieved remarkable progress in text-to-video, image-to-video, and video editing tasks. Despite these advances, diffusion-based video generation remains computationally intensive, especially for high-resolution, long-duration videos. Prior work accelerates its inference by skipping computation, usually at the cost of severe quality degradation. In this paper, we propose SRDiffusion, a novel framework that leverages collaboration between large and small models to reduce inference cost. The large model handles high-noise steps to ensure semantic and motion fidelity (Sketching), while the smaller model refines visual details in low-noise steps (Rendering). Experimental results demonstrate that our method outperforms existing approaches, over 3$\times$ speedup for Wan with nearly no quality loss for VBench, and 2$\times$ speedup for CogVideoX. Our method is introduced as a new direction orthogonal to existing acceleration strategies, offering a practical solution for scalable video generation.
REPA Works Until It Doesn't: Early-Stopped, Holistic Alignment Supercharges Diffusion Training
May 22, 2025



Diffusion Transformers (DiTs) deliver state-of-the-art image quality, yet their training remains notoriously slow. A recent remedy -- representation alignment (REPA) that matches DiT hidden features to those of a non-generative teacher (e.g. DINO) -- dramatically accelerates the early epochs but plateaus or even degrades performance later. We trace this failure to a capacity mismatch: once the generative student begins modelling the joint data distribution, the teacher's lower-dimensional embeddings and attention patterns become a straitjacket rather than a guide. We then introduce HASTE (Holistic Alignment with Stage-wise Termination for Efficient training), a two-phase schedule that keeps the help and drops the hindrance. Phase I applies a holistic alignment loss that simultaneously distills attention maps (relational priors) and feature projections (semantic anchors) from the teacher into mid-level layers of the DiT, yielding rapid convergence. Phase II then performs one-shot termination that deactivates the alignment loss, once a simple trigger such as a fixed iteration is hit, freeing the DiT to focus on denoising and exploit its generative capacity. HASTE speeds up training of diverse DiTs without architecture changes. On ImageNet 256X256, it reaches the vanilla SiT-XL/2 baseline FID in 50 epochs and matches REPA's best FID in 500 epochs, amounting to a 28X reduction in optimization steps. HASTE also improves text-to-image DiTs on MS-COCO, demonstrating to be a simple yet principled recipe for efficient diffusion training across various tasks. Our code is available at https://github.com/NUS-HPC-AI-Lab/HASTE .
DD-Ranking: Rethinking the Evaluation of Dataset Distillation
May 19, 2025
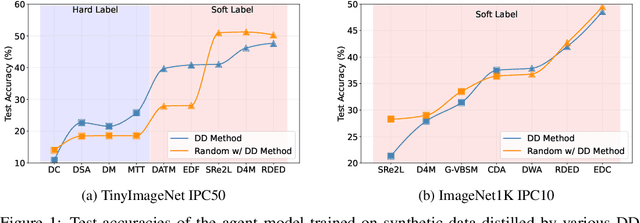
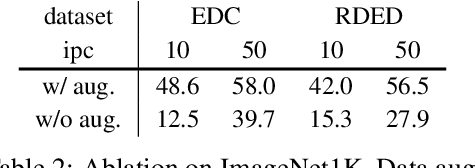
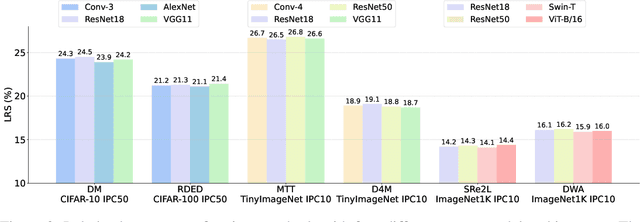
In recent years, dataset distillation has provided a reliable solution for data compression, where models trained on the resulting smaller synthetic datasets achieve performance comparable to those trained on the original datasets. To further improve the performance of synthetic datasets, various training pipelines and optimization objectives have been proposed, greatly advancing the field of dataset distillation. Recent decoupled dataset distillation methods introduce soft labels and stronger data augmentation during the post-evaluation phase and scale dataset distillation up to larger datasets (e.g., ImageNet-1K). However, this raises a question: Is accuracy still a reliable metric to fairly evaluate dataset distillation methods? Our empirical findings suggest that the performance improvements of these methods often stem from additional techniques rather than the inherent quality of the images themselves, with even randomly sampled images achieving superior results. Such misaligned evaluation settings severely hinder the development of DD. Therefore, we propose DD-Ranking, a unified evaluation framework, along with new general evaluation metrics to uncover the true performance improvements achieved by different methods. By refocusing on the actual information enhancement of distilled datasets, DD-Ranking provides a more comprehensive and fair evaluation standard for future research advancements.