 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Exploitation in LLM Agent Markets: A Simulation Framework for E-Commerce Trust
May 11, 2026Agent-based modeling (ABM) has long been used in economics to study human behavior, and large language model (LLM) agents now enable new forms of social and economic simulation. While prior work has discovered strategic deception by LLM agents in financial trading and auction markets, e-commerce remains underexplored despite its distinctive information asymmetry: sellers privately observe product quality, whereas buyers rely on advertised claims and reputation signals. We introduce TruthMarketTwin, a controlled simulation framework for studying LLM-agent behavior in e-commerce markets. The framework is one of the first to model bilateral trade under asymmetric information sharing, where agents make strategic listing, purchasing, rating, and recourse-related decisions to optimize seller profit and buyer utility. We find that LLM agents released into traditional markets autonomously exploit weaknesses in reputation-based governance, while warrant enforcement reduces deception and reshapes strategic reasoning. Our results position LLM-agent simulation as a tool for studying institution-governed autonomous markets.
PReD: An LLM-based Foundation Multimodal Model for Electromagnetic Perception, Recognition, and Decision
Apr 01, 2026Multimodal Large Language Models have demonstrated powerful cross-modal understanding and reasoning capabilities in general domains. However, in the electromagnetic (EM) domain, they still face challenges such as data scarcity and insufficient integration of domain knowledge. This paper proposes PReD, the first foundation model for the EM domain that covers the intelligent closed-loop of "perception, recognition, decision-making." We constructed a high-quality multitask EM dataset, PReD-1.3M, and an evaluation benchmark, PReD-Bench. The dataset encompasses multi-perspective representations such as raw time-domain waveform, frequency-domain spectrograms, and constellation diagrams, covering typical features of communication and radar signals. It supports a range of core tasks, including signal detection, modulation recognition, parameter estimation, protocol recognition, radio frequency fingerprint recognition, and anti-jamming decision-making. PReD adopts a multi-stage training strategy that unifies multiple tasks for EM signals. It achieves closed-loop optimization from end-to-end signal understanding to language-driven reasoning and decision-making, significantly enhancing EM domain expertise while maintaining general multimodal capabilities. Experimental results show that PReD achieves state-of-the-art performance on PReD-Bench constructed from both open-source and self-collected signal datasets. These results collectively validate the feasibility and potential of vision-aligned foundation models in advancing the understanding and reasoning of EM signals.
PRM-as-a-Judge: A Dense Evaluation Paradigm for Fine-Grained Robotic Auditing
Mar 23, 2026Current robotic evaluation is still largely dominated by binary success rates, which collapse rich execution processes into a single outcome and obscure critical qualities such as progress, efficiency, and stability. To address this limitation, we propose PRM-as-a-Judge, a dense evaluation paradigm that leverages Process Reward Models (PRMs) to audit policy execution directly from trajectory videos by estimating task progress from observation sequences. Central to this paradigm is the OPD (Outcome-Process-Diagnosis) metric system, which explicitly formalizes execution quality via a task-aligned progress potential. We characterize dense robotic evaluation through two axiomatic properties: macro-consistency, which requires additive and path-consistent aggregation, and micro-resolution, which requires sensitivity to fine-grained physical evolution. Under this formulation, potential-based PRM judges provide a natural instantiation of dense evaluation, with macro-consistency following directly from the induced scalar potential. We empirically validate the micro-resolution property using RoboPulse, a diagnostic benchmark specifically designed for probing micro-scale progress discrimination, where several trajectory-trained PRM judges outperform discriminative similarity-based methods and general-purpose foundation-model judges. Finally, leveraging PRM-as-a-Judge and the OPD metric system, we conduct a structured audit of mainstream policy paradigms across long-horizon tasks, revealing behavioral signatures and failure modes that are invisible to outcome-only metrics.
MeCo: Enhancing LLM-Empowered Multi-Robot Collaboration via Similar Task Memoization
Jan 28, 2026Multi-robot systems have been widely deployed in real-world applications, providing significant improvements in efficiency and reductions in labor costs. However, most existing multi-robot collaboration methods rely on extensive task-specific training, which limits their adaptability to new or diverse scenarios. Recent research leverages the language understanding and reasoning capabilities of large language models (LLMs) to enable more flexible collaboration without specialized training. Yet, current LLM-empowered approaches remain inefficient: when confronted with identical or similar tasks, they must replan from scratch because they omit task-level similarities. To address this limitation, we propose MeCo, a similarity-aware multi-robot collaboration framework that applies the principle of ``cache and reuse'' (a.k.a., memoization) to reduce redundant computation. Unlike simple task repetition, identifying and reusing solutions for similar but not identical tasks is far more challenging, particularly in multi-robot settings. To this end, MeCo introduces a new similarity testing method that retrieves previously solved tasks with high relevance, enabling effective plan reuse without re-invoking LLMs. Furthermore, we present MeCoBench, the first benchmark designed to evaluate performance on similar-task collaboration scenarios. Experimental results show that MeCo substantially reduces planning costs and improves success rates compared with state-of-the-art approaches.
Embodied Robot Manipulation in the Era of Foundation Models: Planning and Learning Perspectives
Dec 28, 2025Recent advances in vision, language, and multimodal learning have substantially accelerated progress in robotic foundation models, with robot manipulation remaining a central and challenging problem. This survey examines robot manipulation from an algorithmic perspective and organizes recent learning-based approaches within a unified abstraction of high-level planning and low-level control. At the high level, we extend the classical notion of task planning to include reasoning over language, code, motion, affordances, and 3D representations, emphasizing their role in structured and long-horizon decision making. At the low level, we propose a training-paradigm-oriented taxonomy for learning-based control, organizing existing methods along input modeling, latent representation learning, and policy learning. Finally, we identify open challenges and prospective research directions related to scalability, data efficiency, multimodal physical interaction, and safety. Together, these analyses aim to clarify the design space of modern foundation models for robotic manipulation.
Scaling Up AI-Generated Image Detection via Generator-Aware Prototypes
Dec 15, 2025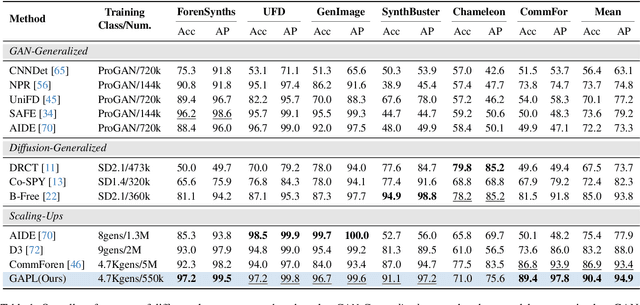
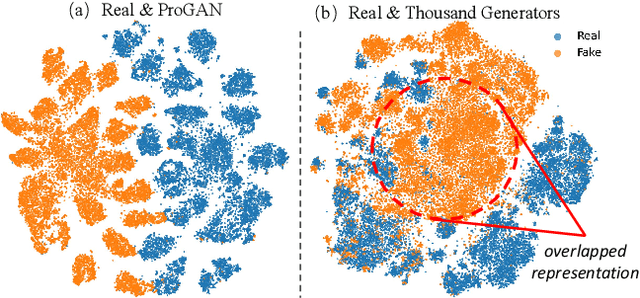
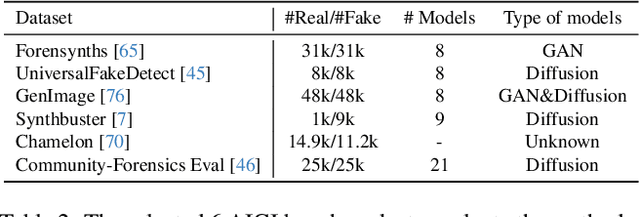
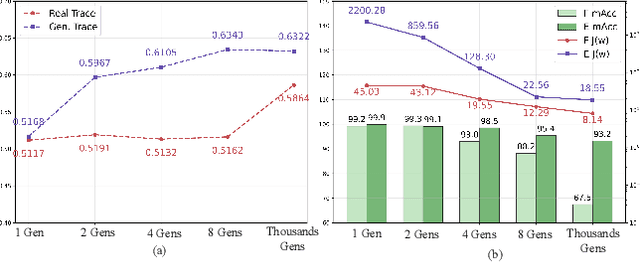
The pursuit of a universal AI-generated image (AIGI) detector often relies on aggregating data from numerous generators to improve generalization. However, this paper identifies a paradoxical phenomenon we term the Benefit then Conflict dilemma, where detector performance stagnates and eventually degrades as source diversity expands. Our systematic analysis, diagnoses this failure by identifying two core issues: severe data-level heterogeneity, which causes the feature distributions of real and synthetic images to increasingly overlap, and a critical model-level bottleneck from fixed, pretrained encoders that cannot adapt to the rising complexity. To address these challenges, we propose Generator-Aware Prototype Learning (GAPL), a framework that constrain representation with a structured learning paradigm. GAPL learns a compact set of canonical forgery prototypes to create a unified, low-variance feature space, effectively countering data heterogeneity.To resolve the model bottleneck, it employs a two-stage training scheme with Low-Rank Adaptation, enhancing its discriminative power while preserving valuable pretrained knowledge. This approach establishes a more robust and generalizable decision boundary. Through extensive experiments, we demonstrate that GAPL achieves state-of-the-art performance, showing superior detection accuracy across a wide variety of GAN and diffusion-based generators. Code is available at https://github.com/UltraCapture/GAPL
MathSticks: A Benchmark for Visual Symbolic Compositional Reasoning with Matchstick Puzzles
Oct 01, 2025We introduce \textsc{MathSticks}, a benchmark for Visual Symbolic Compositional Reasoning (VSCR), which unifies visual perception, symbolic manipulation, and arithmetic consistency. Each task presents an incorrect matchstick equation that must be corrected by moving one or two sticks under strict conservation rules. The benchmark includes both text-guided and purely visual settings, systematically covering digit scale, move complexity, solution multiplicity, and operator variation, with 1.4M generated instances and a curated test set. Evaluations of 14 vision--language models reveal substantial limitations: closed-source models succeed only on simple cases, open-source models fail in the visual regime, while humans exceed 90\% accuracy. These findings establish \textsc{MathSticks} as a rigorous testbed for advancing compositional reasoning across vision and symbols. Our code and dataset are publicly available at https://github.com/Yuheng2000/MathSticks.
When Deepfakes Look Real: Detecting AI-Generated Faces with Unlabeled Data due to Annotation Challenges
Aug 12, 2025Existing deepfake detection methods heavily depend on labeled training data. However, as AI-generated content becomes increasingly realistic, even \textbf{human annotators struggle to distinguish} between deepfakes and authentic images. This makes the labeling process both time-consuming and less reliable. Specifically, there is a growing demand for approaches that can effectively utilize large-scale unlabeled data from online social networks. Unlike typical unsupervised learning tasks, where categories are distinct, AI-generated faces closely mimic real image distributions and share strong similarities, causing performance drop in conventional strategies. In this paper, we introduce the Dual-Path Guidance Network (DPGNet), to tackle two key challenges: (1) bridging the domain gap between faces from different generation models, and (2) utilizing unlabeled image samples. The method features two core modules: text-guided cross-domain alignment, which uses learnable prompts to unify visual and textual embeddings into a domain-invariant feature space, and curriculum-driven pseudo label generation, which dynamically exploit more informative unlabeled samples. To prevent catastrophic forgetting, we also facilitate bridging between domains via cross-domain knowledge distillation. Extensive experiments on \textbf{11 popular datasets}, show that DPGNet outperforms SoTA approaches by \textbf{6.3\%}, highlighting its effectiveness in leveraging unlabeled data to address the annotation challenges posed by the increasing realism of deepfakes.
VisualTrans: A Benchmark for Real-World Visual Transformation Reasoning
Aug 06, 2025Visual transformation reasoning (VTR) is a vital cognitive capability that empowers intelligent agents to understand dynamic scenes, model causal relationships, and predict future states, and thereby guiding actions and laying the foundation for advanced intelligent systems. However, existing benchmarks suffer from a sim-to-real gap, limited task complexity, and incomplete reasoning coverage, limiting their practical use in real-world scenarios. To address these limitations, we introduce VisualTrans, the first comprehensive benchmark specifically designed for VTR in real-world human-object interaction scenarios. VisualTrans encompasses 12 semantically diverse manipulation tasks and systematically evaluates three essential reasoning dimensions - spatial, procedural, and quantitative - through 6 well-defined subtask types. The benchmark features 472 high-quality question-answer pairs in various formats, including multiple-choice, open-ended counting, and target enumeration. We introduce a scalable data construction pipeline built upon first-person manipulation videos, which integrates task selection, image pair extraction, automated metadata annotation with large multimodal models, and structured question generation. Human verification ensures the final benchmark is both high-quality and interpretable. Evaluations of various state-of-the-art vision-language models show strong performance in static spatial tasks. However, they reveal notable shortcomings in dynamic, multi-step reasoning scenarios, particularly in areas like intermediate state recognition and transformation sequence planning. These findings highlight fundamental weaknesses in temporal modeling and causal reasoning, providing clear directions for future research aimed at developing more capable and generalizable VTR systems. The dataset and code are available at https://github.com/WangYipu2002/VisualTrans.
CRC-SGAD: Conformal Risk Control for Supervised Graph Anomaly Detection
Apr 03, 2025



Graph Anomaly Detection (GAD) is critical in security-sensitive domains, yet faces reliability challenges: miscalibrated confidence estimation (underconfidence in normal nodes, overconfidence in anomalies), adversarial vulnerability of derived confidence score under structural perturbations, and limited efficacy of conventional calibration methods for sparse anomaly patterns. Thus we propose CRC-SGAD, a framework integrating statistical risk control into GAD via two innovations: (1) A Dual-Threshold Conformal Risk Control mechanism that provides theoretically guaranteed bounds for both False Negative Rate (FNR) and False Positive Rate (FPR) through providing prediction sets; (2) A Subgraph-aware Spectral Graph Neural Calibrator (SSGNC) that optimizes node representations through adaptive spectral filtering while reducing the size of prediction sets via hybrid loss optimization. Experiments on four datasets and five GAD models demonstrate statistically significant improvements in FNR and FPR control and prediction set size. CRC-SGAD establishes a paradigm for statistically rigorous anomaly detection in graph-structured security applications.