 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Barbados 2018 List of Open Issues in Continual Learning
Nov 16, 2018We want to make progress toward artificial general intelligence, namely general-purpose agents that autonomously learn how to competently act in complex environments. The purpose of this report is to sketch a research outline, share some of the most important open issues we are facing, and stimulate further discussion in the community. The content is based on some of our discussions during a week-long workshop held in Barbados in February 2018.
Unicorn: Continual Learning with a Universal, Off-policy Agent
Jul 03, 2018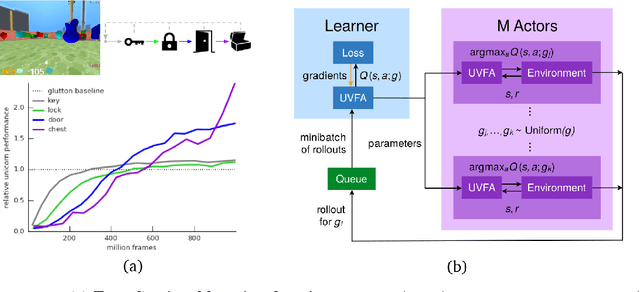
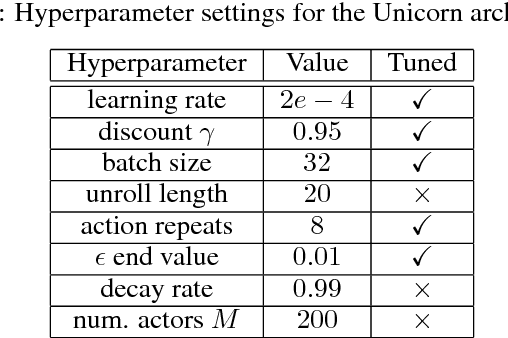
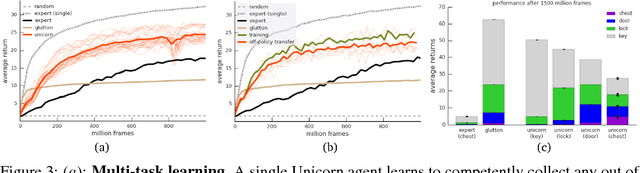
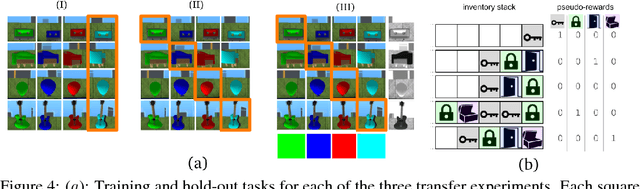
Some real-world domains are best characterized as a single task, but for others this perspective is limiting. Instead, some tasks continually grow in complexity, in tandem with the agent's competence. In continual learning, also referred to as lifelong learning, there are no explicit task boundaries or curricula. As learning agents have become more powerful, continual learning remains one of the frontiers that has resisted quick progress. To test continual learning capabilities we consider a challenging 3D domain with an implicit sequence of tasks and sparse rewards. We propose a novel agent architecture called Unicorn, which demonstrates strong continual learning and outperforms several baseline agents on the proposed domain. The agent achieves this by jointly representing and learning multiple policies efficiently, using a parallel off-policy learning setup.
Meta-Learning by the Baldwin Effect
Jun 22, 2018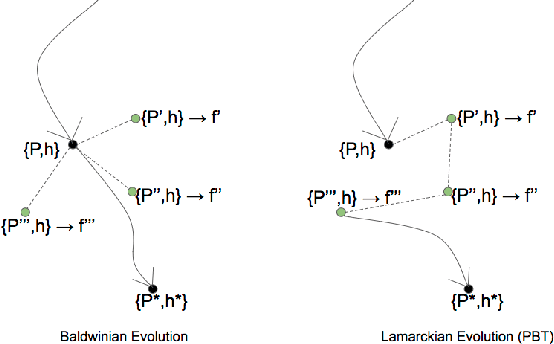
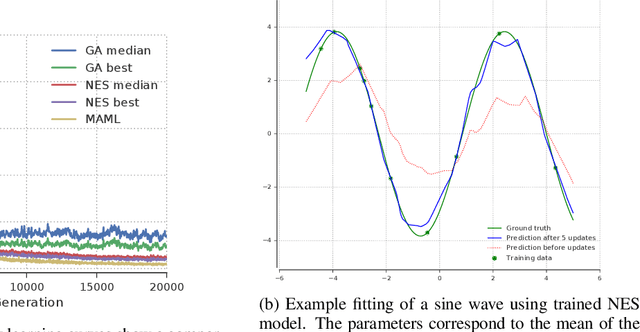
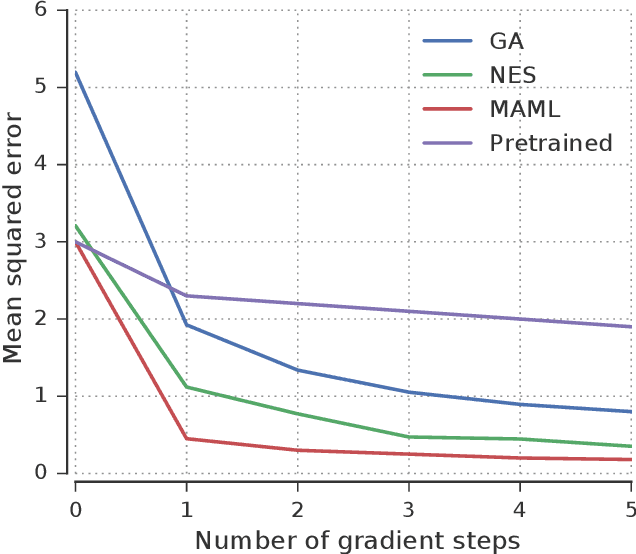
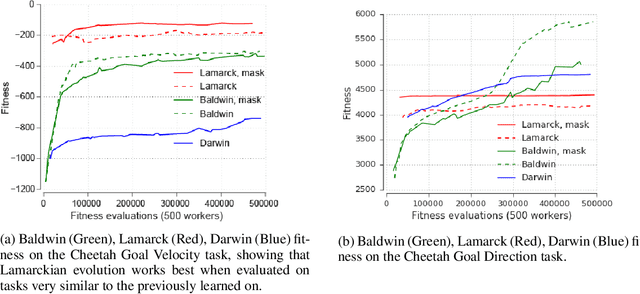
The scope of the Baldwin effect was recently called into question by two papers that closely examined the seminal work of Hinton and Nowlan. To this date there has been no demonstration of its necessity in empirically challenging tasks. Here we show that the Baldwin effect is capable of evolving few-shot supervised and reinforcement learning mechanisms, by shaping the hyperparameters and the initial parameters of deep learning algorithms. Furthermore it can genetically accommodate strong learning biases on the same set of problems as a recent machine learning algorithm called MAML "Model Agnostic Meta-Learning" which uses second-order gradients instead of evolution to learn a set of reference parameters (initial weights) that can allow rapid adaptation to tasks sampled from a distribution. Whilst in simple cases MAML is more data efficient than the Baldwin effect, the Baldwin effect is more general in that it does not require gradients to be backpropagated to the reference parameters or hyperparameters, and permits effectively any number of gradient updates in the inner loop. The Baldwin effect learns strong learning dependent biases, rather than purely genetically accommodating fixed behaviours in a learning independent manner.
Successor Features for Transfer in Reinforcement Learning
Apr 12, 2018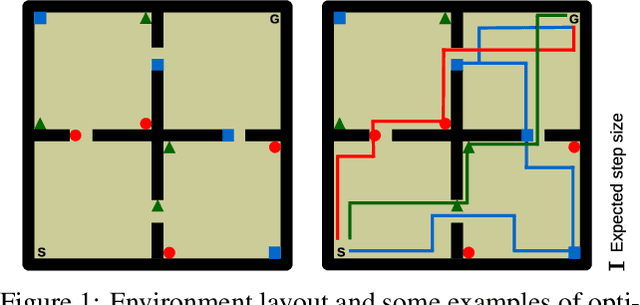
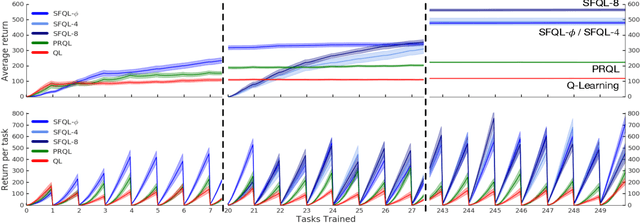
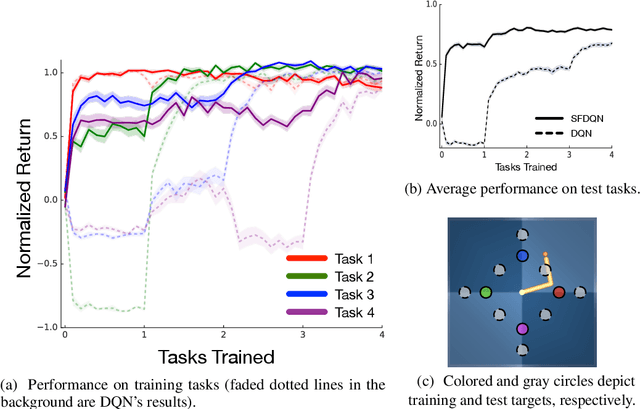
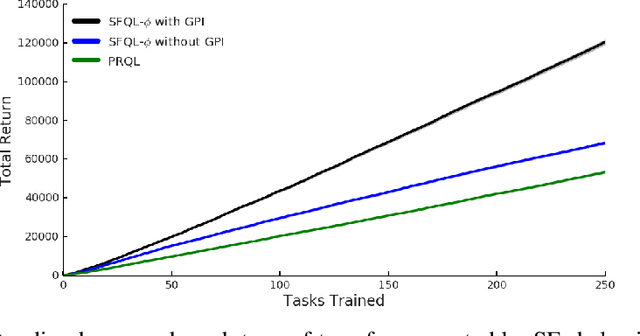
Transfer in reinforcement learning refers to the notion that generalization should occur not only within a task but also across tasks. We propose a transfer framework for the scenario where the reward function changes between tasks but the environment's dynamics remain the same. Our approach rests on two key ideas: "successor features", a value function representation that decouples the dynamics of the environment from the rewards, and "generalized policy improvement", a generalization of dynamic programming's policy improvement operation that considers a set of policies rather than a single one. Put together, the two ideas lead to an approach that integrates seamlessly within the reinforcement learning framework and allows the free exchange of information across tasks. The proposed method also provides performance guarantees for the transferred policy even before any learning has taken place. We derive two theorems that set our approach in firm theoretical ground and present experiments that show that it successfully promotes transfer in practice, significantly outperforming alternative methods in a sequence of navigation tasks and in the control of a simulated robotic arm.
Deep Q-learning from Demonstrations
Nov 22, 2017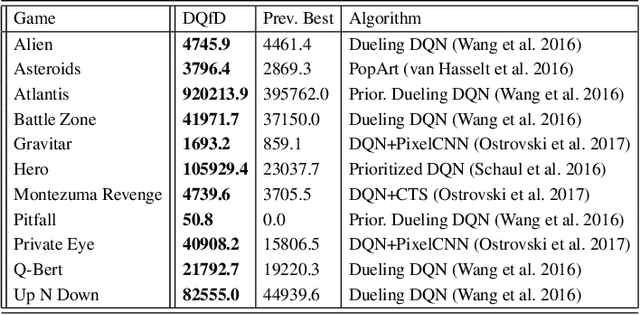
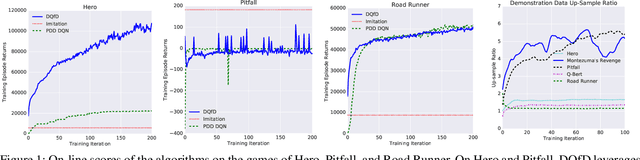
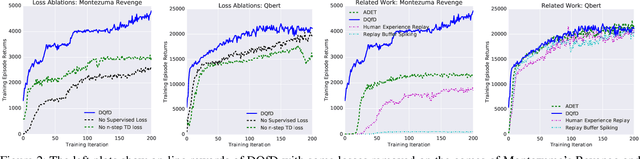
Deep reinforcement learning (RL) has achieved several high profile successes in difficult decision-making problems. However, these algorithms typically require a huge amount of data before they reach reasonable performance. In fact, their performance during learning can be extremely poor. This may be acceptable for a simulator, but it severely limits the applicability of deep RL to many real-world tasks, where the agent must learn in the real environment. In this paper we study a setting where the agent may access data from previous control of the system. We present an algorithm, Deep Q-learning from Demonstrations (DQfD), that leverages small sets of demonstration data to massively accelerate the learning process even from relatively small amounts of demonstration data and is able to automatically assess the necessary ratio of demonstration data while learning thanks to a prioritized replay mechanism. DQfD works by combining temporal difference updates with supervised classification of the demonstrator's actions. We show that DQfD has better initial performance than Prioritized Dueling Double Deep Q-Networks (PDD DQN) as it starts with better scores on the first million steps on 41 of 42 games and on average it takes PDD DQN 83 million steps to catch up to DQfD's performance. DQfD learns to out-perform the best demonstration given in 14 of 42 games. In addition, DQfD leverages human demonstrations to achieve state-of-the-art results for 11 games. Finally, we show that DQfD performs better than three related algorithms for incorporating demonstration data into DQN.
Rainbow: Combining Improvements in Deep Reinforcement Learning
Oct 06, 2017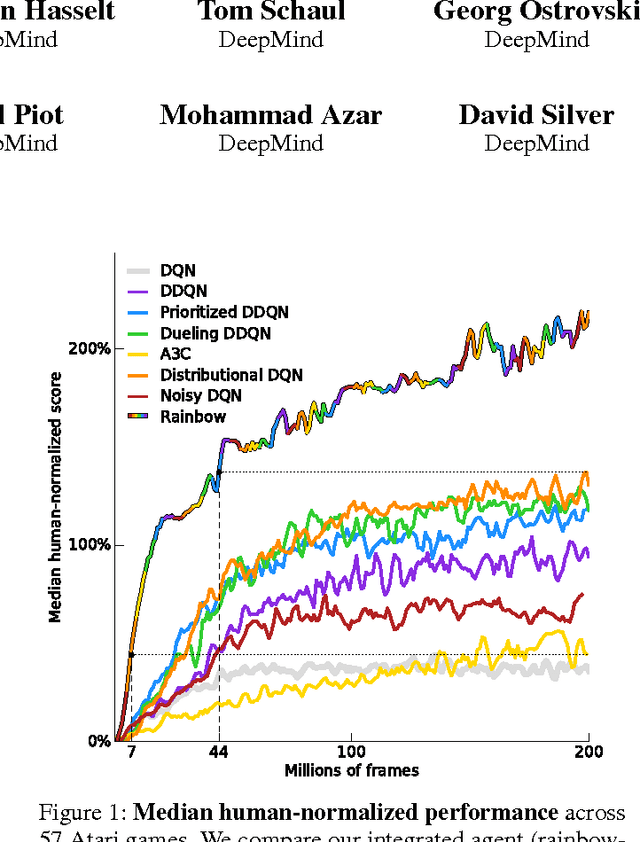
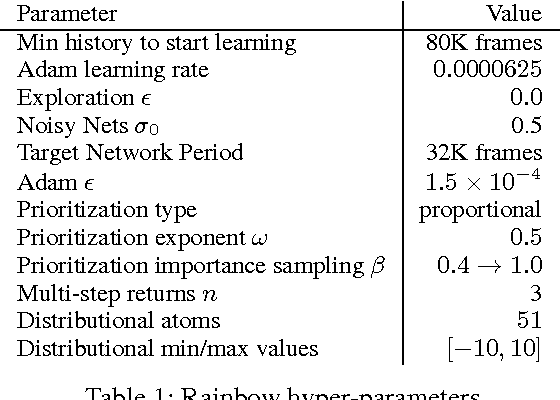
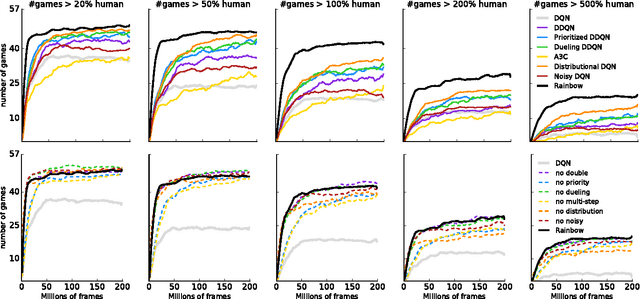
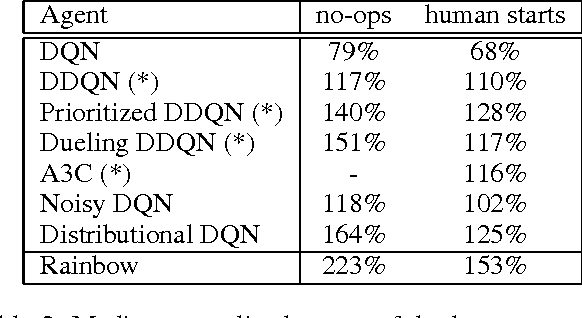
The deep reinforcement learning community has made several independent improvements to the DQN algorithm. However, it is unclear which of these extensions are complementary and can be fruitfully combined. This paper examines six extensions to the DQN algorithm and empirically studies their combination. Our experiments show that the combination provides state-of-the-art performance on the Atari 2600 benchmark, both in terms of data efficiency and final performance. We also provide results from a detailed ablation study that shows the contribution of each component to overall performance.
StarCraft II: A New Challenge for Reinforcement Learning
Aug 16, 2017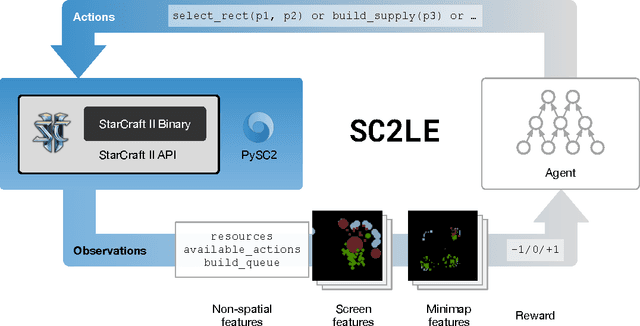
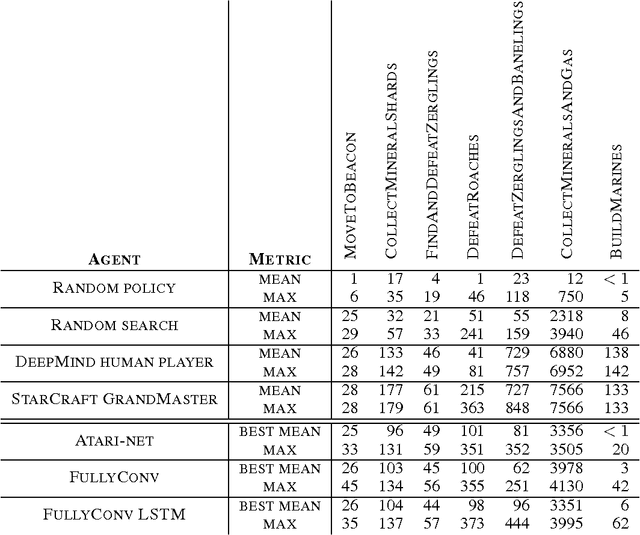
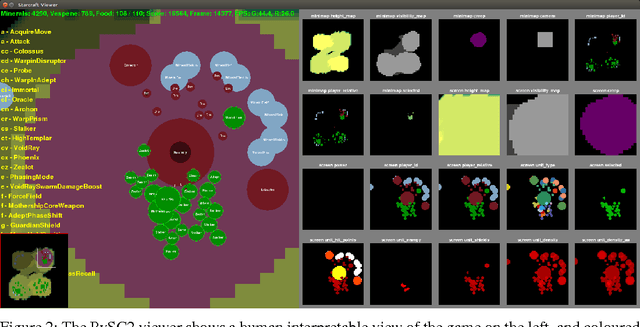
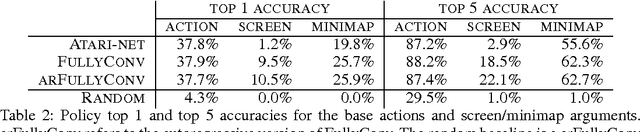
This paper introduces SC2LE (StarCraft II Learning Environment), a reinforcement learning environment based on the StarCraft II game. This domain poses a new grand challenge for reinforcement learning, representing a more difficult class of problems than considered in most prior work. It is a multi-agent problem with multiple players interacting; there is imperfect information due to a partially observed map; it has a large action space involving the selection and control of hundreds of units; it has a large state space that must be observed solely from raw input feature planes; and it has delayed credit assignment requiring long-term strategies over thousands of steps. We describe the observation, action, and reward specification for the StarCraft II domain and provide an open source Python-based interface for communicating with the game engine. In addition to the main game maps, we provide a suite of mini-games focusing on different elements of StarCraft II gameplay. For the main game maps, we also provide an accompanying dataset of game replay data from human expert players. We give initial baseline results for neural networks trained from this data to predict game outcomes and player actions. Finally, we present initial baseline results for canonical deep reinforcement learning agents applied to the StarCraft II domain. On the mini-games, these agents learn to achieve a level of play that is comparable to a novice player. However, when trained on the main game, these agents are unable to make significant progress. Thus, SC2LE offers a new and challenging environment for exploring deep reinforcement learning algorithms and architectures.
The Predictron: End-To-End Learning and Planning
Jul 20, 2017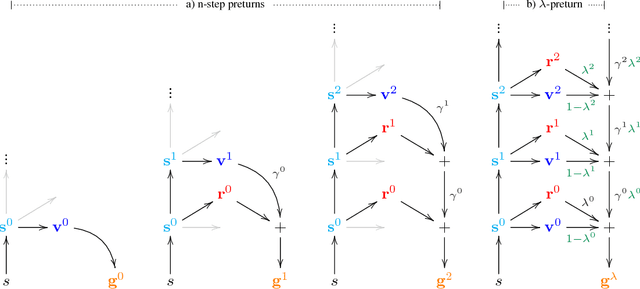

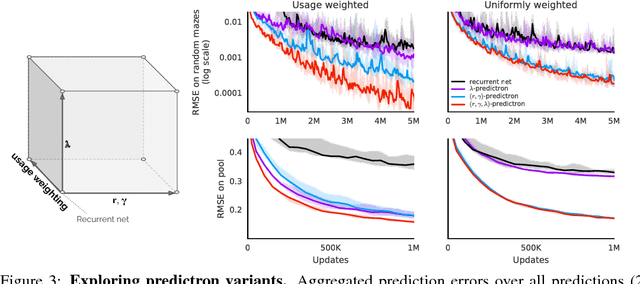
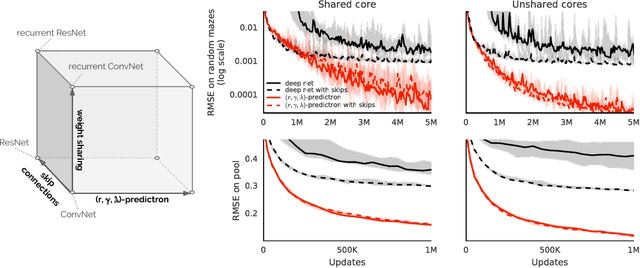
One of the key challenges of artificial intelligence is to learn models that are effective in the context of planning. In this document we introduce the predictron architecture. The predictron consists of a fully abstract model, represented by a Markov reward process, that can be rolled forward multiple "imagined" planning steps. Each forward pass of the predictron accumulates internal rewards and values over multiple planning depths. The predictron is trained end-to-end so as to make these accumulated values accurately approximate the true value function. We applied the predictron to procedurally generated random mazes and a simulator for the game of pool. The predictron yielded significantly more accurate predictions than conventional deep neural network architectures.
FeUdal Networks for Hierarchical Reinforcement Learning
Mar 06, 2017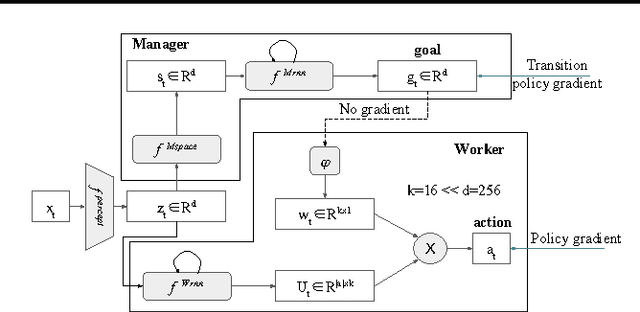
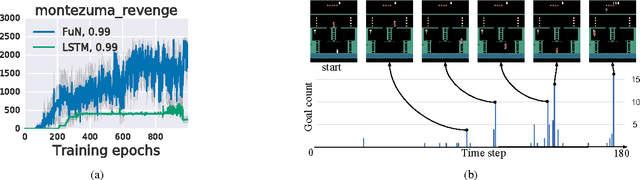
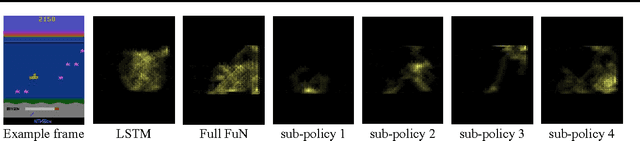
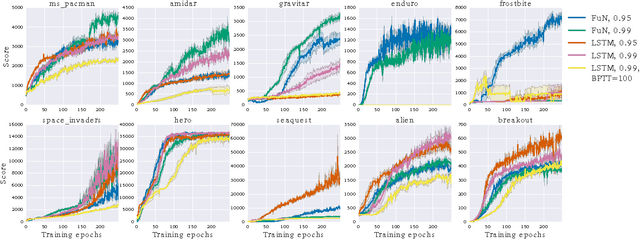
We introduce FeUdal Networks (FuNs): a novel architecture for hierarchical reinforcement learning. Our approach is inspired by the feudal reinforcement learning proposal of Dayan and Hinton, and gains power and efficacy by decoupling end-to-end learning across multiple levels -- allowing it to utilise different resolutions of time. Our framework employs a Manager module and a Worker module. The Manager operates at a lower temporal resolution and sets abstract goals which are conveyed to and enacted by the Worker. The Worker generates primitive actions at every tick of the environment. The decoupled structure of FuN conveys several benefits -- in addition to facilitating very long timescale credit assignment it also encourages the emergence of sub-policies associated with different goals set by the Manager. These properties allow FuN to dramatically outperform a strong baseline agent on tasks that involve long-term credit assignment or memorisation. We demonstrate the performance of our proposed system on a range of tasks from the ATARI suite and also from a 3D DeepMind Lab environment.
Learning to learn by gradient descent by gradient descent
Nov 30, 2016
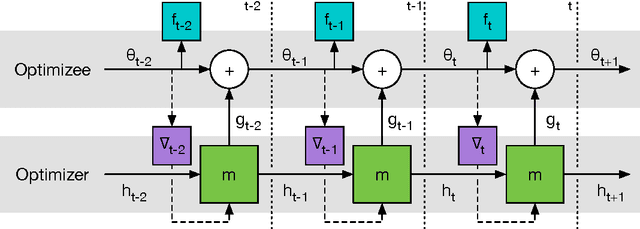
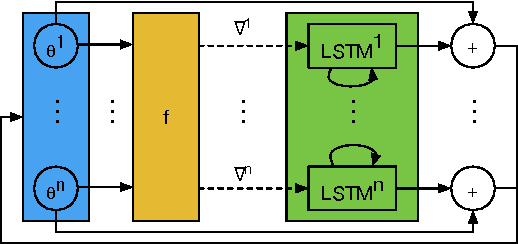
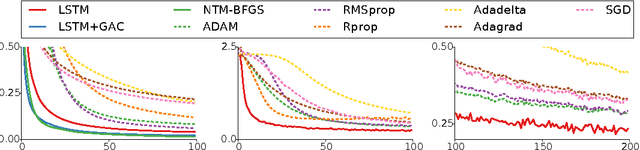
The move from hand-designed features to learned features in machine learning has been wildly successful. In spite of this, optimization algorithms are still designed by hand. In this paper we show how the design of an optimization algorithm can be cast as a learning problem, allowing the algorithm to learn to exploit structure in the problems of interest in an automatic way. Our learned algorithms, implemented by LSTMs, outperform generic, hand-designed competitors on the tasks for which they are trained, and also generalize well to new tasks with similar structure. We demonstrate this on a number of tasks, including simple convex problems, training neural networks, and styling images with neural art.