 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
Aug 25, 2021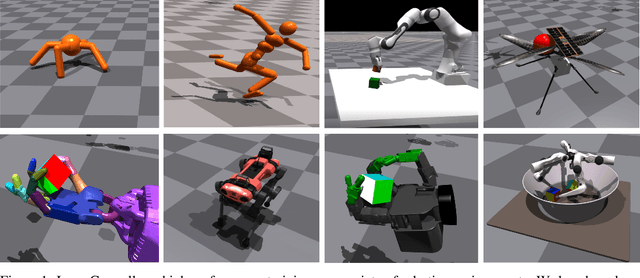
Isaac Gym offers a high performance learning platform to train policies for wide variety of robotics tasks directly on GPU. Both physics simulation and the neural network policy training reside on GPU and communicate by directly passing data from physics buffers to PyTorch tensors without ever going through any CPU bottlenecks. This leads to blazing fast training times for complex robotics tasks on a single GPU with 2-3 orders of magnitude improvements compared to conventional RL training that uses a CPU based simulator and GPU for neural networks. We host the results and videos at \url{https://sites.google.com/view/isaacgym-nvidia} and isaac gym can be downloaded at \url{https://developer.nvidia.com/isaac-gym}.
DefGraspSim: Simulation-based grasping of 3D deformable objects
Jul 12, 2021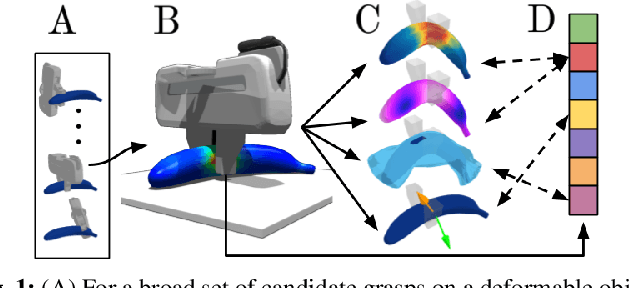
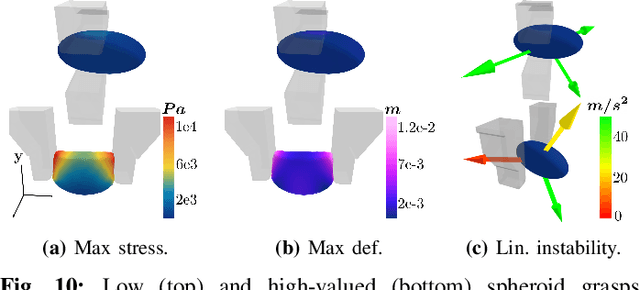
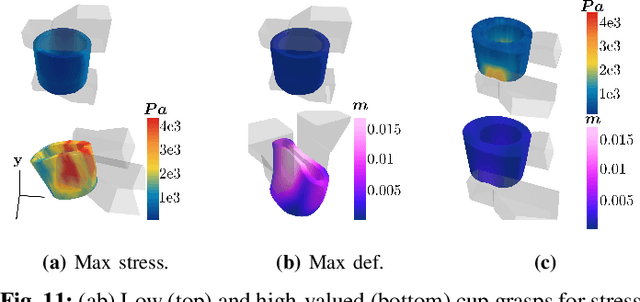
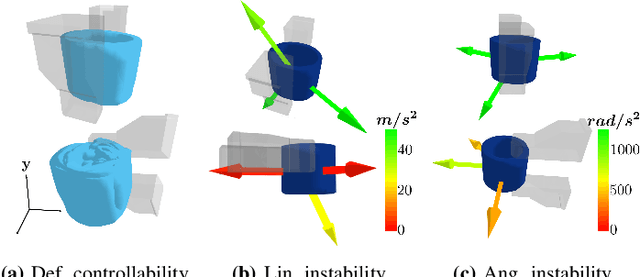
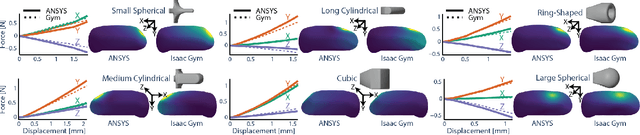
Robotic grasping of 3D deformable objects (e.g., fruits/vegetables, internal organs, bottles/boxes) is critical for real-world applications such as food processing, robotic surgery, and household automation. However, developing grasp strategies for such objects is uniquely challenging. In this work, we efficiently simulate grasps on a wide range of 3D deformable objects using a GPU-based implementation of the corotational finite element method (FEM). To facilitate future research, we open-source our simulated dataset (34 objects, 1e5 Pa elasticity range, 6800 grasp evaluations, 1.1M grasp measurements), as well as a code repository that allows researchers to run our full FEM-based grasp evaluation pipeline on arbitrary 3D object models of their choice. We also provide a detailed analysis on 6 object primitives. For each primitive, we methodically describe the effects of different grasp strategies, compute a set of performance metrics (e.g., deformation, stress) that fully capture the object response, and identify simple grasp features (e.g., gripper displacement, contact area) measurable by robots prior to pickup and predictive of these performance metrics. Finally, we demonstrate good correspondence between grasps on simulated objects and their real-world counterparts.
DiSECt: A Differentiable Simulation Engine for Autonomous Robotic Cutting
May 25, 2021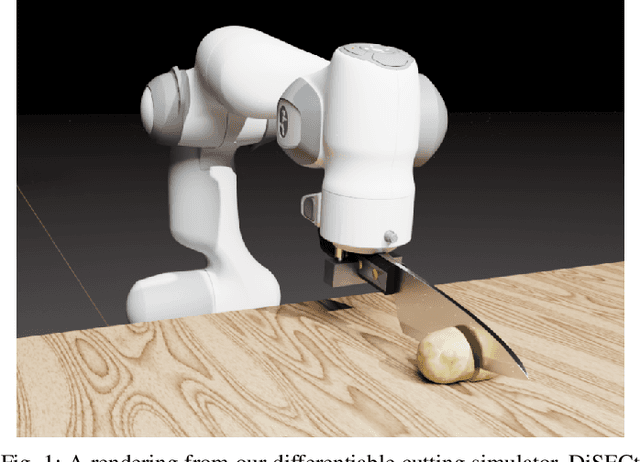
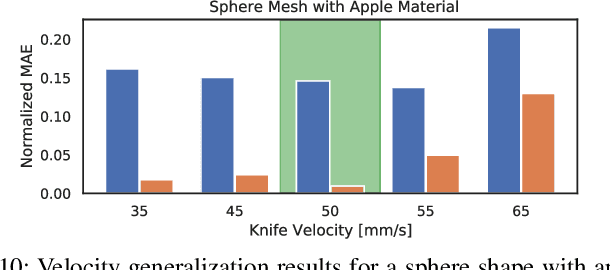
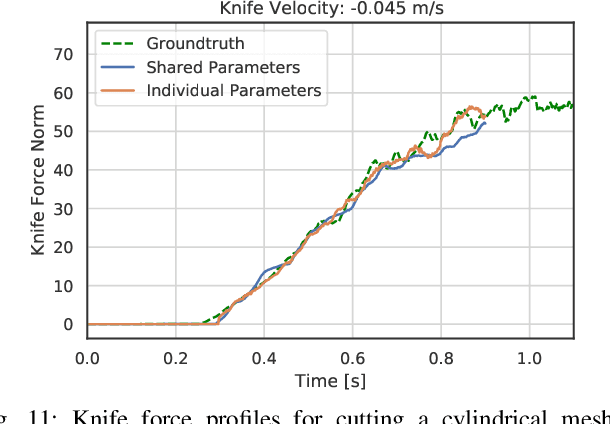
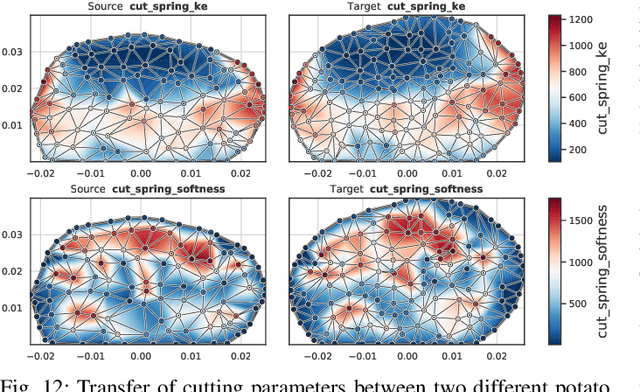
Robotic cutting of soft materials is critical for applications such as food processing, household automation, and surgical manipulation. As in other areas of robotics, simulators can facilitate controller verification, policy learning, and dataset generation. Moreover, differentiable simulators can enable gradient-based optimization, which is invaluable for calibrating simulation parameters and optimizing controllers. In this work, we present DiSECt: the first differentiable simulator for cutting soft materials. The simulator augments the finite element method (FEM) with a continuous contact model based on signed distance fields (SDF), as well as a continuous damage model that inserts springs on opposite sides of the cutting plane and allows them to weaken until zero stiffness, enabling crack formation. Through various experiments, we evaluate the performance of the simulator. We first show that the simulator can be calibrated to match resultant forces and deformation fields from a state-of-the-art commercial solver and real-world cutting datasets, with generality across cutting velocities and object instances. We then show that Bayesian inference can be performed efficiently by leveraging the differentiability of the simulator, estimating posteriors over hundreds of parameters in a fraction of the time of derivative-free methods. Finally, we illustrate that control parameters in the simulation can be optimized to minimize cutting forces via lateral slicing motions. We publish videos and additional results on our project website at https://diff-cutting-sim.github.io.
gradSim: Differentiable simulation for system identification and visuomotor control
Apr 06, 2021
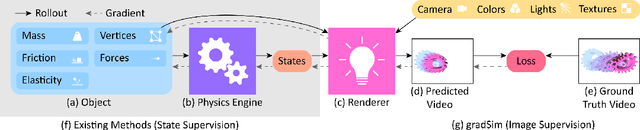
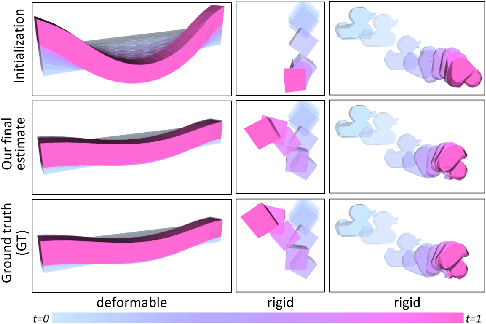

We consider the problem of estimating an object's physical properties such as mass, friction, and elasticity directly from video sequences. Such a system identification problem is fundamentally ill-posed due to the loss of information during image formation. Current solutions require precise 3D labels which are labor-intensive to gather, and infeasible to create for many systems such as deformable solids or cloth. We present gradSim, a framework that overcomes the dependence on 3D supervision by leveraging differentiable multiphysics simulation and differentiable rendering to jointly model the evolution of scene dynamics and image formation. This novel combination enables backpropagation from pixels in a video sequence through to the underlying physical attributes that generated them. Moreover, our unified computation graph -- spanning from the dynamics and through the rendering process -- enables learning in challenging visuomotor control tasks, without relying on state-based (3D) supervision, while obtaining performance competitive to or better than techniques that rely on precise 3D labels.
Sim-to-Real for Robotic Tactile Sensing via Physics-Based Simulation and Learned Latent Projections
Mar 31, 2021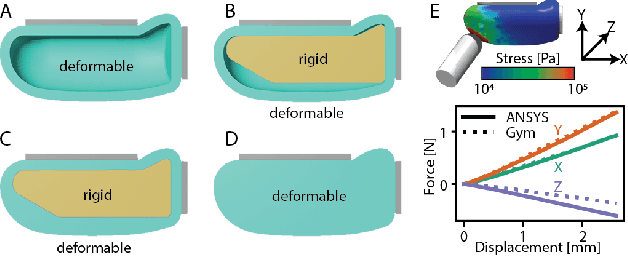
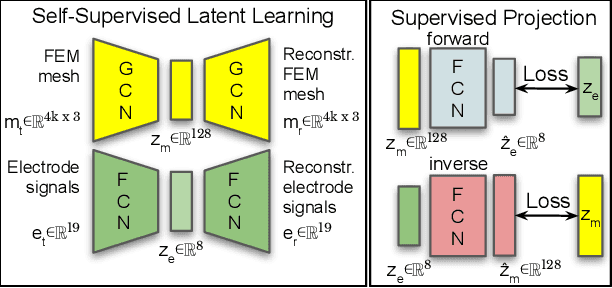
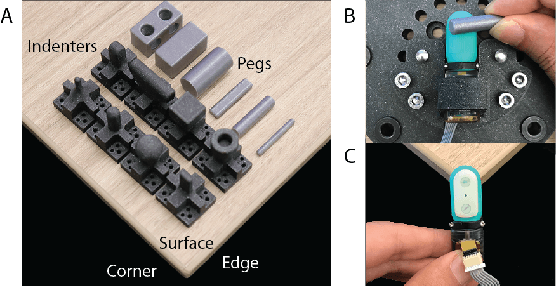
Tactile sensing is critical for robotic grasping and manipulation of objects under visual occlusion. However, in contrast to simulations of robot arms and cameras, current simulations of tactile sensors have limited accuracy, speed, and utility. In this work, we develop an efficient 3D finite element method (FEM) model of the SynTouch BioTac sensor using an open-access, GPU-based robotics simulator. Our simulations closely reproduce results from an experimentally-validated model in an industry-standard, CPU-based simulator, but at 75x the speed. We then learn latent representations for simulated BioTac deformations and real-world electrical output through self-supervision, as well as projections between the latent spaces using a small supervised dataset. Using these learned latent projections, we accurately synthesize real-world BioTac electrical output and estimate contact patches, both for unseen contact interactions. This work contributes an efficient, freely-accessible FEM model of the BioTac and comprises one of the first efforts to combine self-supervision, cross-modal transfer, and sim-to-real transfer for tactile sensors.
Non-Smooth Newton Methods for Deformable Multi-Body Dynamics
Jul 10, 2019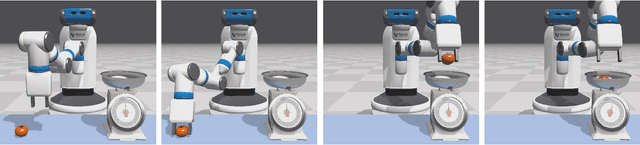
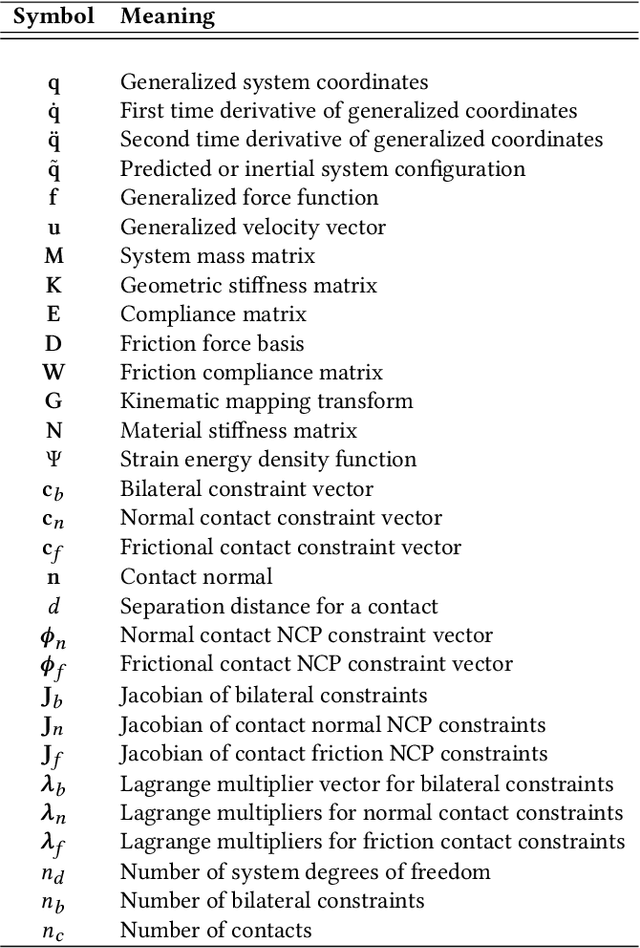
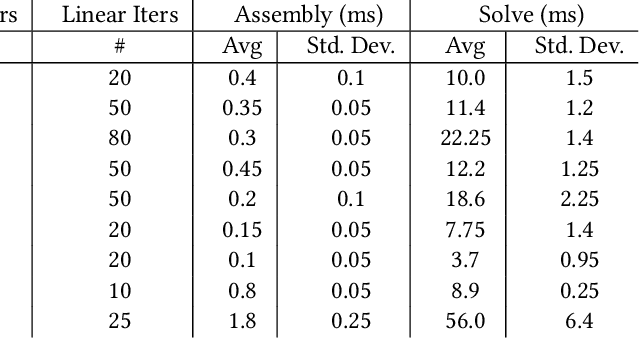
We present a framework for the simulation of rigid and deformable bodies in the presence of contact and friction. Our method is based on a non-smooth Newton iteration that solves the underlying nonlinear complementarity problems (NCPs) directly. This approach allows us to support nonlinear dynamics models, including hyperelastic deformable bodies and articulated rigid mechanisms, coupled through a smooth isotropic friction model. The fixed-point nature of our method means it requires only the solution of a symmetric linear system as a building block. We propose a new complementarity preconditioner for NCP functions that improves convergence, and we develop an efficient GPU-based solver based on the conjugate residual (CR) method that is suitable for interactive simulations. We show how to improve robustness using a new geometric stiffness approximation and evaluate our method's performance on a number of robotics simulation scenarios, including dexterous manipulation and training using reinforcement learning.
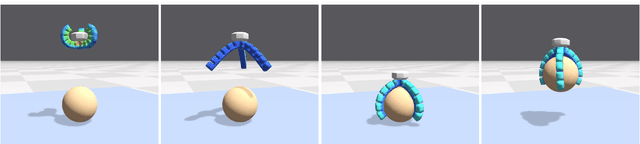
A Validated Physical Model For Real-Time Simulation of Soft Robotic Snakes
Apr 05, 2019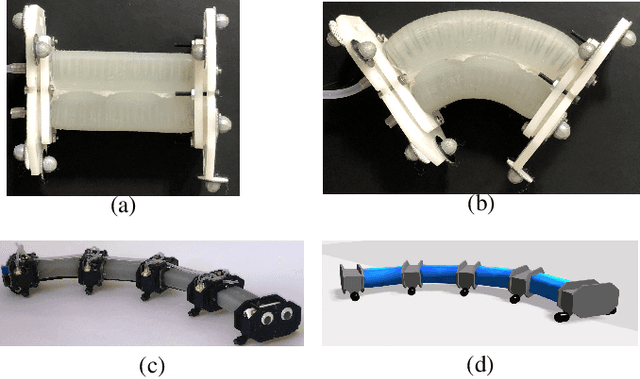

In this work we present a framework that is capable of accurately representing soft robotic actuators in a multiphysics environment in real-time. We propose a constraint-based dynamics model of a 1-dimensional pneumatic soft actuator that accounts for internal pressure forces, as well as the effect of actuator latency and damping under inflation and deflation and demonstrate its accuracy a full soft robotic snake with the composition of multiple 1D actuators. We verify our model's accuracy in static deformation and dynamic locomotion open-loop control experiments. To achieve real-time performance we leverage the parallel computation power of GPUs to allow interactive control and feedback.
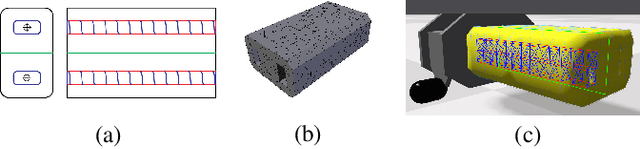
Closing the Sim-to-Real Loop: Adapting Simulation Randomization with Real World Experience
Mar 05, 2019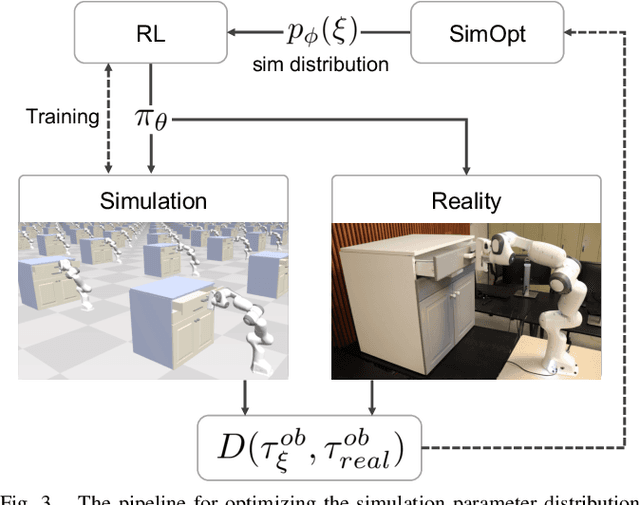
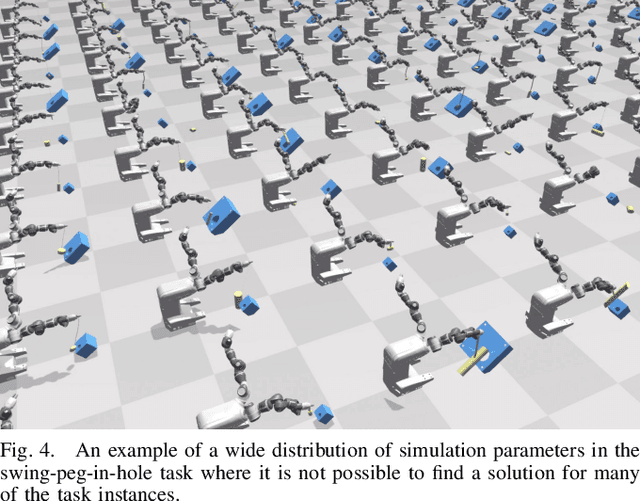
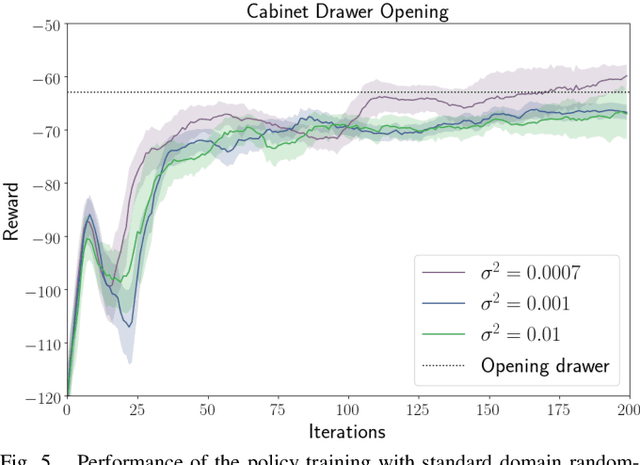
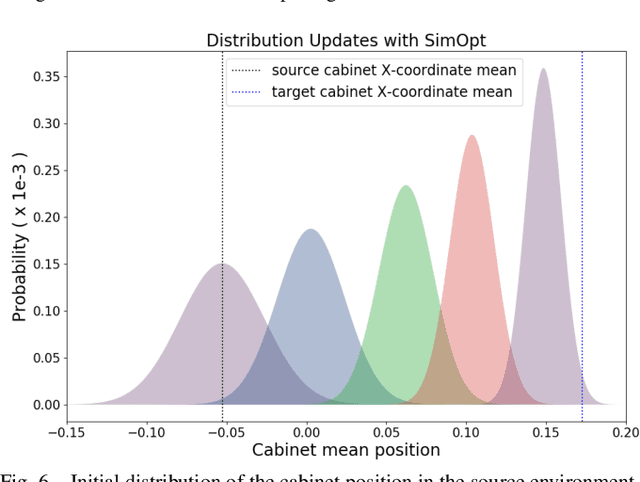
We consider the problem of transferring policies to the real world by training on a distribution of simulated scenarios. Rather than manually tuning the randomization of simulations, we adapt the simulation parameter distribution using a few real world roll-outs interleaved with policy training. In doing so, we are able to change the distribution of simulations to improve the policy transfer by matching the policy behavior in simulation and the real world. We show that policies trained with our method are able to reliably transfer to different robots in two real world tasks: swing-peg-in-hole and opening a cabinet drawer. The video of our experiments can be found at https://sites.google.com/view/simopt
GPU-Accelerated Robotic Simulation for Distributed Reinforcement Learning
Oct 24, 2018
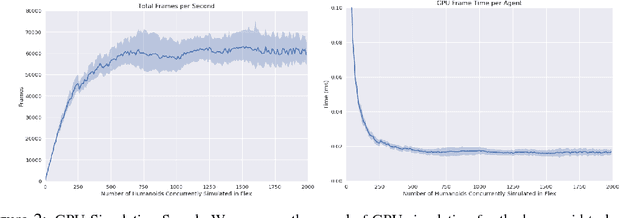
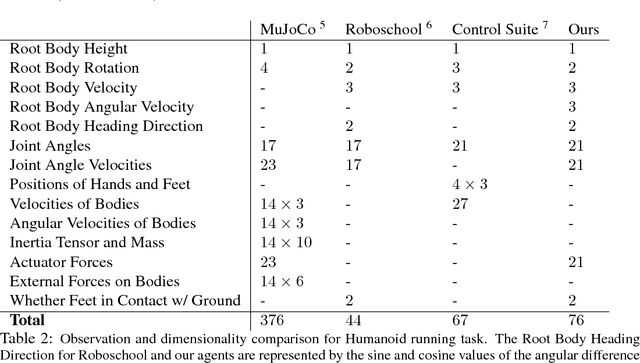
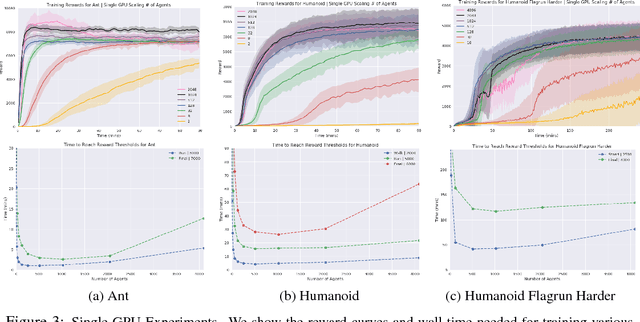
Most Deep Reinforcement Learning (Deep RL) algorithms require a prohibitively large number of training samples for learning complex tasks. Many recent works on speeding up Deep RL have focused on distributed training and simulation. While distributed training is often done on the GPU, simulation is not. In this work, we propose using GPU-accelerated RL simulations as an alternative to CPU ones. Using NVIDIA Flex, a GPU-based physics engine, we show promising speed-ups of learning various continuous-control, locomotion tasks. With one GPU and CPU core, we are able to train the Humanoid running task in less than 20 minutes, using 10-1000x fewer CPU cores than previous works. We also demonstrate the scalability of our simulator to multi-GPU settings to train more challenging locomotion tasks.