 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInner Monologue: Embodied Reasoning through Planning with Language Models
Jul 12, 2022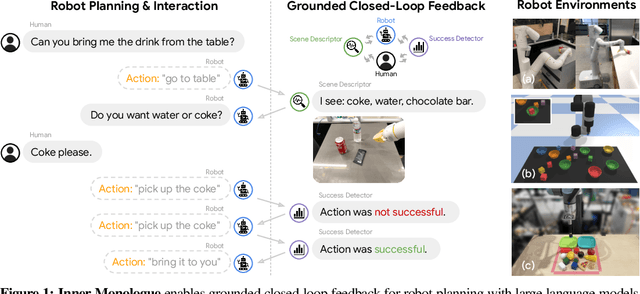
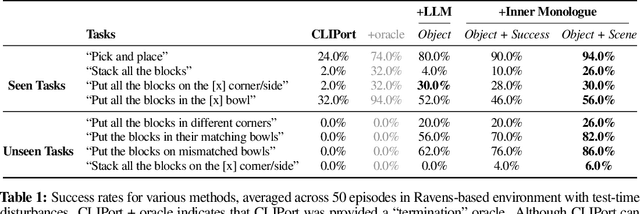
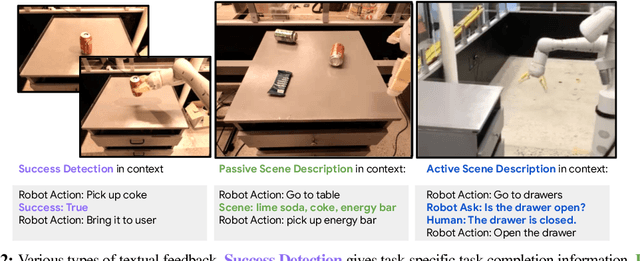
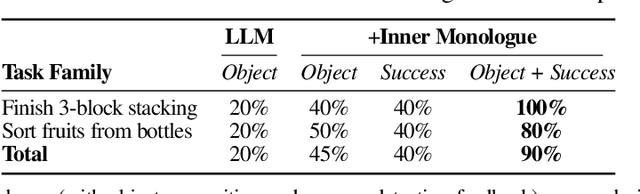
Recent works have shown how the reasoning capabilities of Large Language Models (LLMs) can be applied to domains beyond natural language processing, such as planning and interaction for robots. These embodied problems require an agent to understand many semantic aspects of the world: the repertoire of skills available, how these skills influence the world, and how changes to the world map back to the language. LLMs planning in embodied environments need to consider not just what skills to do, but also how and when to do them - answers that change over time in response to the agent's own choices. In this work, we investigate to what extent LLMs used in such embodied contexts can reason over sources of feedback provided through natural language, without any additional training. We propose that by leveraging environment feedback, LLMs are able to form an inner monologue that allows them to more richly process and plan in robotic control scenarios. We investigate a variety of sources of feedback, such as success detection, scene description, and human interaction. We find that closed-loop language feedback significantly improves high-level instruction completion on three domains, including simulated and real table top rearrangement tasks and long-horizon mobile manipulation tasks in a kitchen environment in the real world.
Visuomotor Control in Multi-Object Scenes Using Object-Aware Representations
May 12, 2022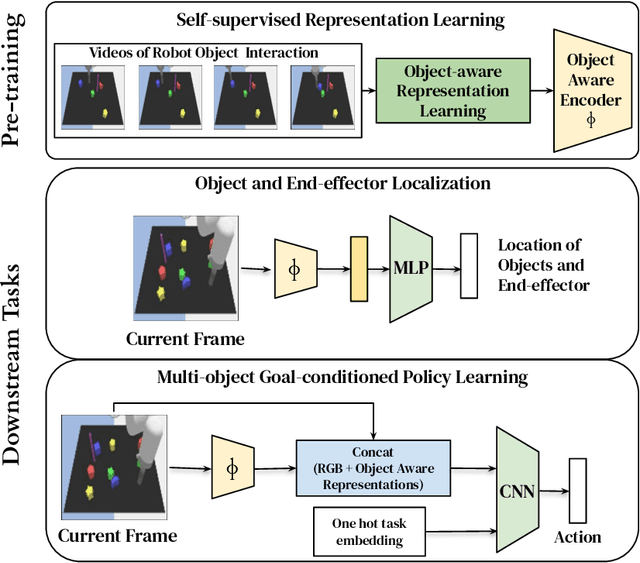
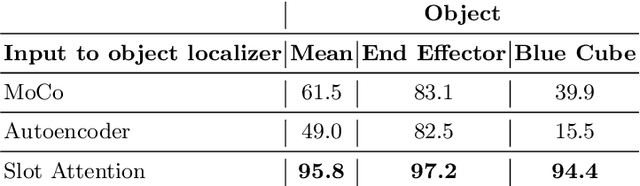
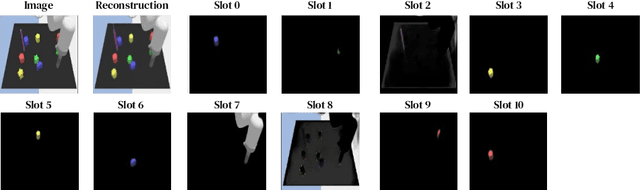
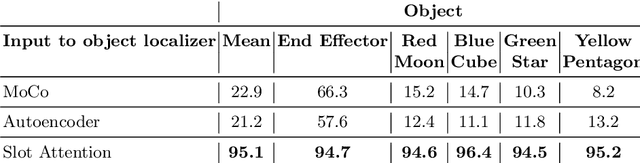
Perceptual understanding of the scene and the relationship between its different components is important for successful completion of robotic tasks. Representation learning has been shown to be a powerful technique for this, but most of the current methodologies learn task specific representations that do not necessarily transfer well to other tasks. Furthermore, representations learned by supervised methods require large labeled datasets for each task that are expensive to collect in the real world. Using self-supervised learning to obtain representations from unlabeled data can mitigate this problem. However, current self-supervised representation learning methods are mostly object agnostic, and we demonstrate that the resulting representations are insufficient for general purpose robotics tasks as they fail to capture the complexity of scenes with many components. In this paper, we explore the effectiveness of using object-aware representation learning techniques for robotic tasks. Our self-supervised representations are learned by observing the agent freely interacting with different parts of the environment and is queried in two different settings: (i) policy learning and (ii) object location prediction. We show that our model learns control policies in a sample-efficient manner and outperforms state-of-the-art object agnostic techniques as well as methods trained on raw RGB images. Our results show a 20 percent increase in performance in low data regimes (1000 trajectories) in policy training using implicit behavioral cloning (IBC). Furthermore, our method outperforms the baselines for the task of object localization in multi-object scenes.
Improving Zero-shot Generalization in Offline Reinforcement Learning using Generalized Similarity Functions
Nov 29, 2021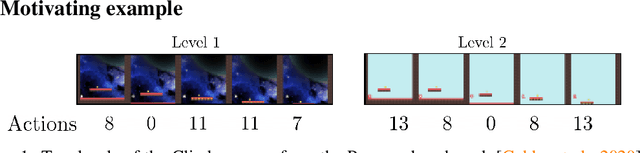
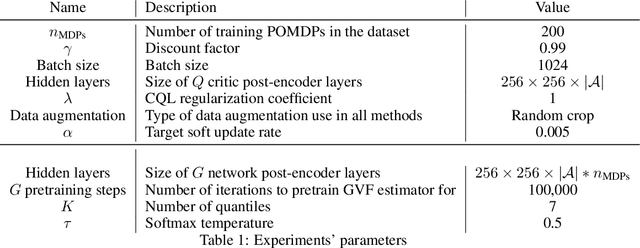
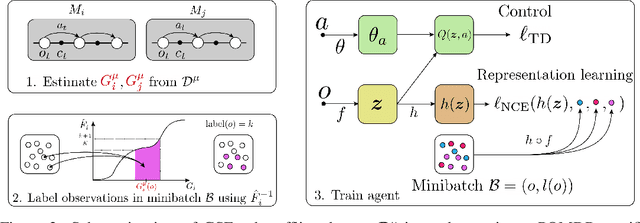
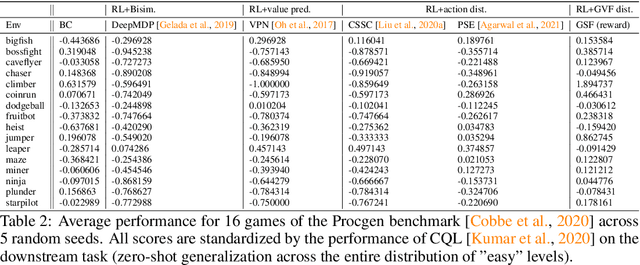
Reinforcement learning (RL) agents are widely used for solving complex sequential decision making tasks, but still exhibit difficulty in generalizing to scenarios not seen during training. While prior online approaches demonstrated that using additional signals beyond the reward function can lead to better generalization capabilities in RL agents, i.e. using self-supervised learning (SSL), they struggle in the offline RL setting, i.e. learning from a static dataset. We show that performance of online algorithms for generalization in RL can be hindered in the offline setting due to poor estimation of similarity between observations. We propose a new theoretically-motivated framework called Generalized Similarity Functions (GSF), which uses contrastive learning to train an offline RL agent to aggregate observations based on the similarity of their expected future behavior, where we quantify this similarity using \emph{generalized value functions}. We show that GSF is general enough to recover existing SSL objectives while also improving zero-shot generalization performance on a complex offline RL benchmark, offline Procgen.
Implicit Behavioral Cloning
Sep 01, 2021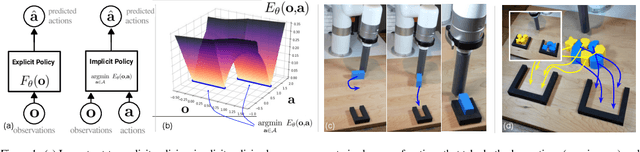
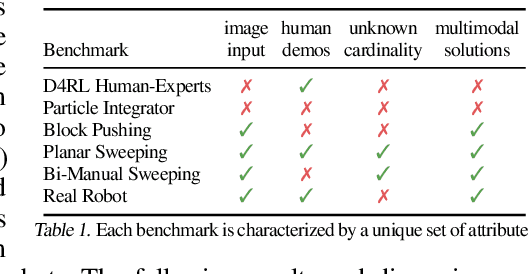
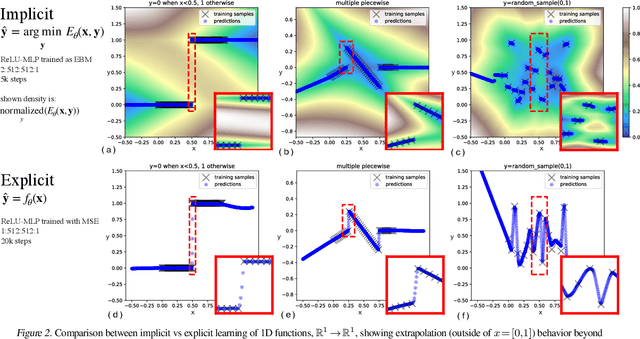
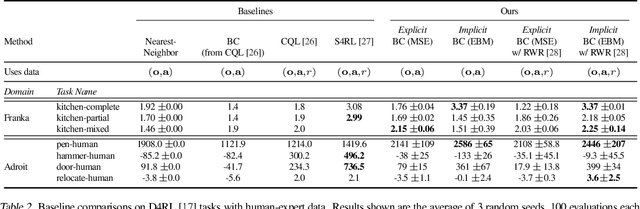
We find that across a wide range of robot policy learning scenarios, treating supervised policy learning with an implicit model generally performs better, on average, than commonly used explicit models. We present extensive experiments on this finding, and we provide both intuitive insight and theoretical arguments distinguishing the properties of implicit models compared to their explicit counterparts, particularly with respect to approximating complex, potentially discontinuous and multi-valued (set-valued) functions. On robotic policy learning tasks we show that implicit behavioral cloning policies with energy-based models (EBM) often outperform common explicit (Mean Square Error, or Mixture Density) behavioral cloning policies, including on tasks with high-dimensional action spaces and visual image inputs. We find these policies provide competitive results or outperform state-of-the-art offline reinforcement learning methods on the challenging human-expert tasks from the D4RL benchmark suite, despite using no reward information. In the real world, robots with implicit policies can learn complex and remarkably subtle behaviors on contact-rich tasks from human demonstrations, including tasks with high combinatorial complexity and tasks requiring 1mm precision.
XIRL: Cross-embodiment Inverse Reinforcement Learning
Jun 07, 2021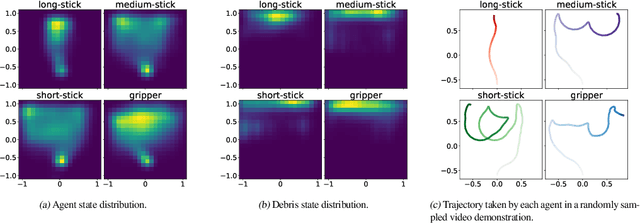
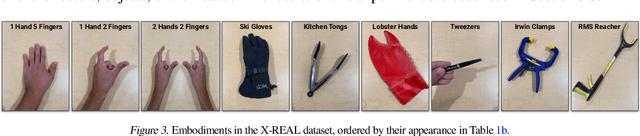
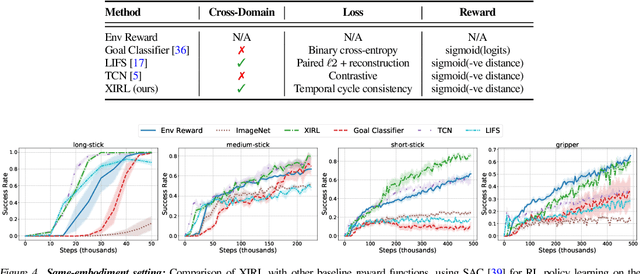
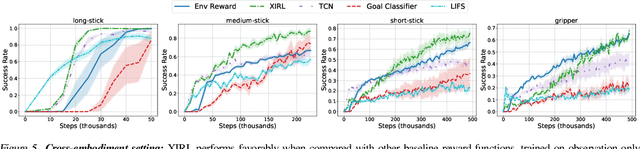
We investigate the visual cross-embodiment imitation setting, in which agents learn policies from videos of other agents (such as humans) demonstrating the same task, but with stark differences in their embodiments -- shape, actions, end-effector dynamics, etc. In this work, we demonstrate that it is possible to automatically discover and learn vision-based reward functions from cross-embodiment demonstration videos that are robust to these differences. Specifically, we present a self-supervised method for Cross-embodiment Inverse Reinforcement Learning (XIRL) that leverages temporal cycle-consistency constraints to learn deep visual embeddings that capture task progression from offline videos of demonstrations across multiple expert agents, each performing the same task differently due to embodiment differences. Prior to our work, producing rewards from self-supervised embeddings has typically required alignment with a reference trajectory, which may be difficult to acquire. We show empirically that if the embeddings are aware of task-progress, simply taking the negative distance between the current state and goal state in the learned embedding space is useful as a reward for training policies with reinforcement learning. We find our learned reward function not only works for embodiments seen during training, but also generalizes to entirely new embodiments. We also find that XIRL policies are more sample efficient than baselines, and in some cases exceed the sample efficiency of the same agent trained with ground truth sparse rewards.
With a Little Help from My Friends: Nearest-Neighbor Contrastive Learning of Visual Representations
Apr 29, 2021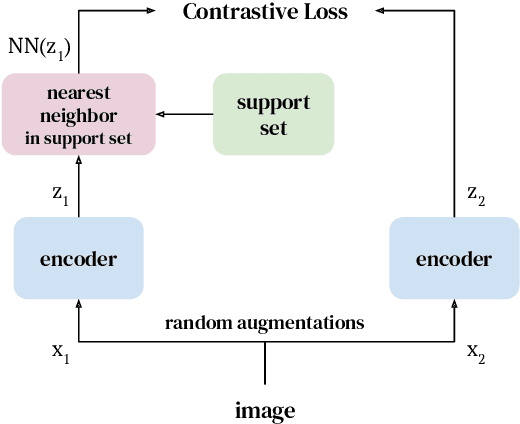
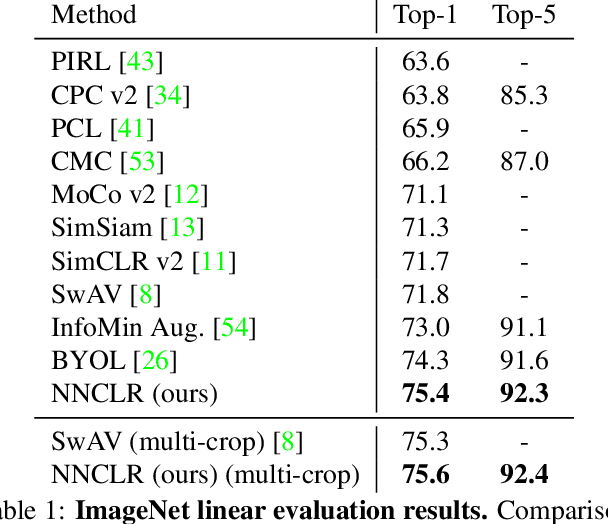
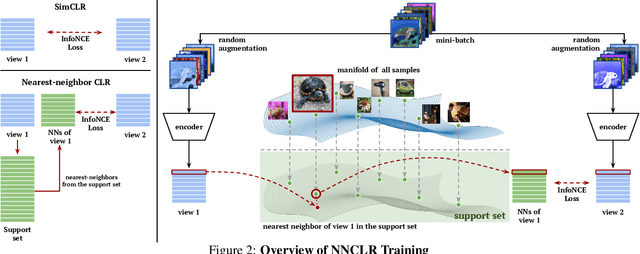
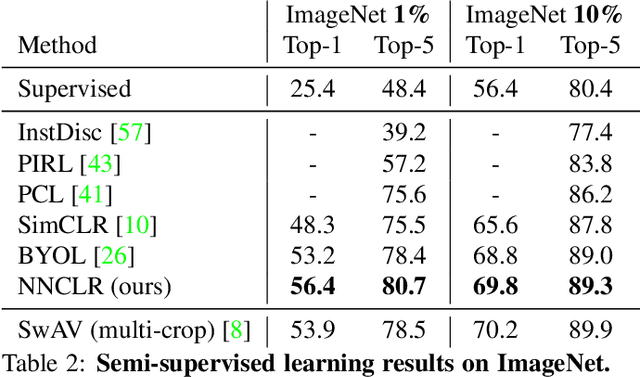
Self-supervised learning algorithms based on instance discrimination train encoders to be invariant to pre-defined transformations of the same instance. While most methods treat different views of the same image as positives for a contrastive loss, we are interested in using positives from other instances in the dataset. Our method, Nearest-Neighbor Contrastive Learning of visual Representations (NNCLR), samples the nearest neighbors from the dataset in the latent space, and treats them as positives. This provides more semantic variations than pre-defined transformations. We find that using the nearest-neighbor as positive in contrastive losses improves performance significantly on ImageNet classification, from 71.7% to 75.6%, outperforming previous state-of-the-art methods. On semi-supervised learning benchmarks we improve performance significantly when only 1% ImageNet labels are available, from 53.8% to 56.5%. On transfer learning benchmarks our method outperforms state-of-the-art methods (including supervised learning with ImageNet) on 8 out of 12 downstream datasets. Furthermore, we demonstrate empirically that our method is less reliant on complex data augmentations. We see a relative reduction of only 2.1% ImageNet Top-1 accuracy when we train using only random crops.
Offline Reinforcement Learning with Fisher Divergence Critic Regularization
Mar 14, 2021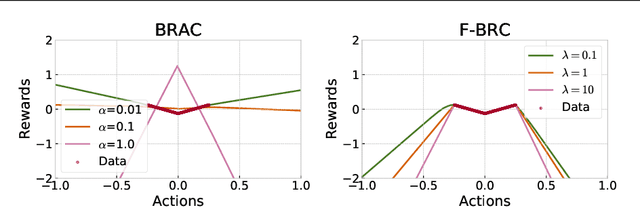
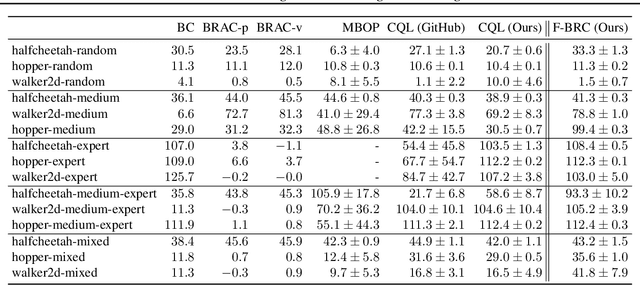
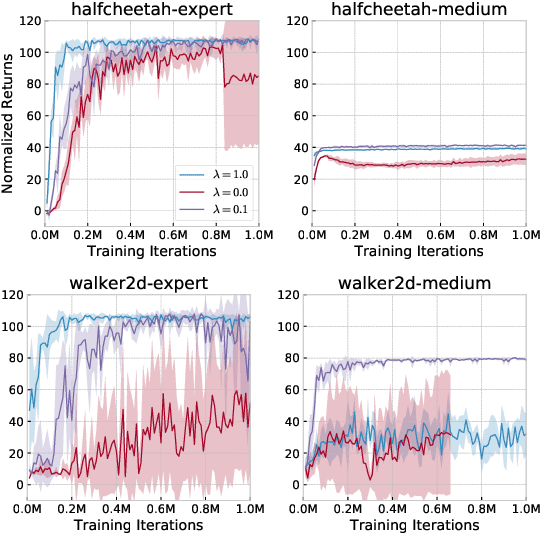
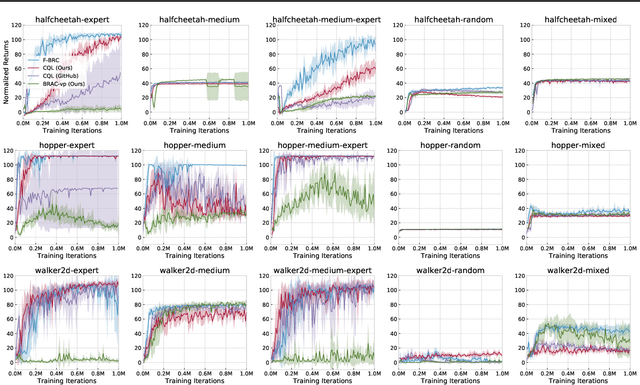
Many modern approaches to offline Reinforcement Learning (RL) utilize behavior regularization, typically augmenting a model-free actor critic algorithm with a penalty measuring divergence of the policy from the offline data. In this work, we propose an alternative approach to encouraging the learned policy to stay close to the data, namely parameterizing the critic as the log-behavior-policy, which generated the offline data, plus a state-action value offset term, which can be learned using a neural network. Behavior regularization then corresponds to an appropriate regularizer on the offset term. We propose using a gradient penalty regularizer for the offset term and demonstrate its equivalence to Fisher divergence regularization, suggesting connections to the score matching and generative energy-based model literature. We thus term our resulting algorithm Fisher-BRC (Behavior Regularized Critic). On standard offline RL benchmarks, Fisher-BRC achieves both improved performance and faster convergence over existing state-of-the-art methods.
Learning to Rearrange Deformable Cables, Fabrics, and Bags with Goal-Conditioned Transporter Networks
Dec 18, 2020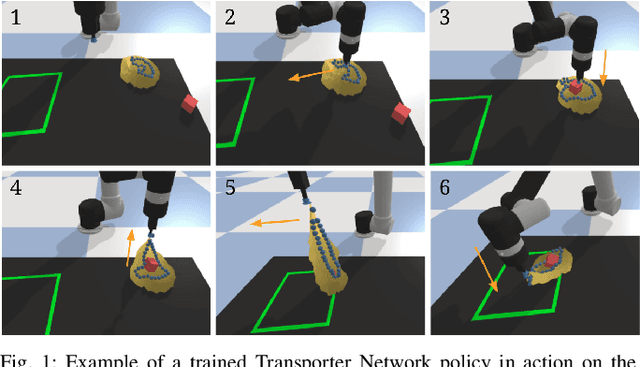
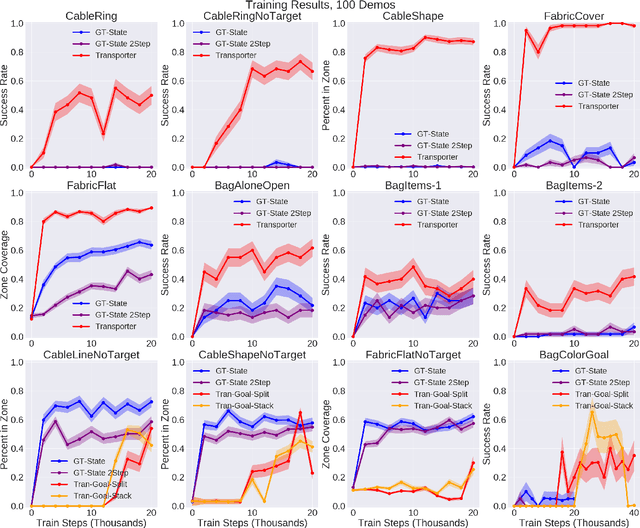
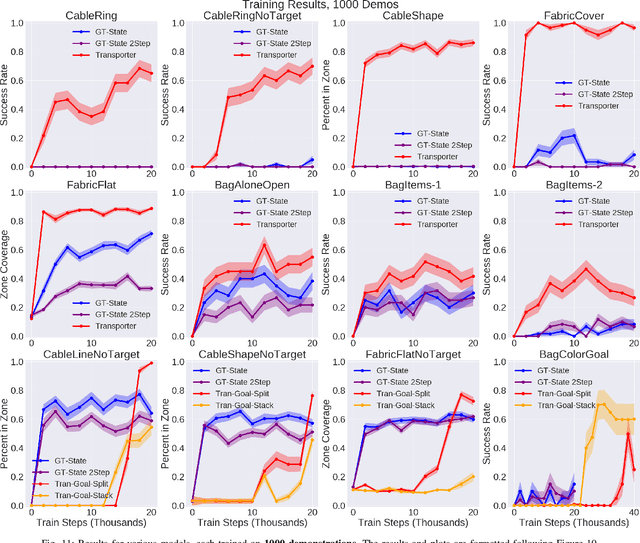
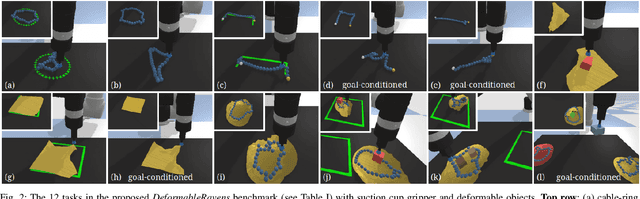
Rearranging and manipulating deformable objects such as cables, fabrics, and bags is a long-standing challenge in robotic manipulation. The complex dynamics and high-dimensional configuration spaces of deformables, compared to rigid objects, make manipulation difficult not only for multi-step planning, but even for goal specification. Goals cannot be as easily specified as rigid object poses, and may involve complex relative spatial relations such as "place the item inside the bag". In this work, we develop a suite of simulated benchmarks with 1D, 2D, and 3D deformable structures, including tasks that involve image-based goal-conditioning and multi-step deformable manipulation. We propose embedding goal-conditioning into Transporter Networks, a recently proposed model architecture for learning robotic manipulation that rearranges deep features to infer displacements that can represent pick and place actions. We demonstrate that goal-conditioned Transporter Networks enable agents to manipulate deformable structures into flexibly specified configurations without test-time visual anchors for target locations. We also significantly extend prior results using Transporter Networks for manipulating deformable objects by testing on tasks with 2D and 3D deformables. Supplementary material is available at https://berkeleyautomation.github.io/bags/.
Transporter Networks: Rearranging the Visual World for Robotic Manipulation
Oct 27, 2020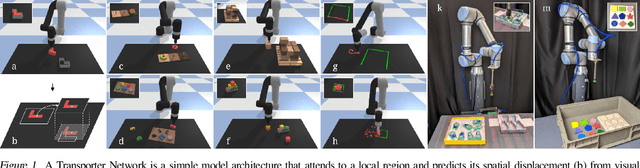
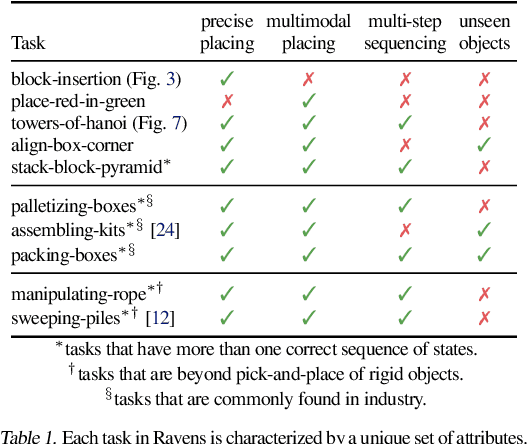
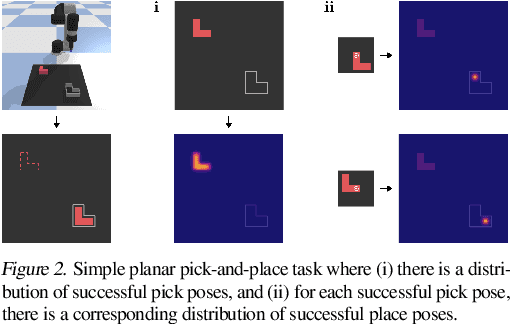
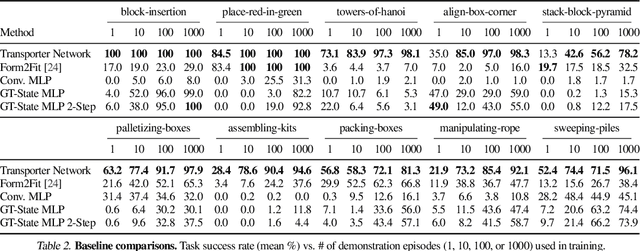
Robotic manipulation can be formulated as inducing a sequence of spatial displacements: where the space being moved can encompass an object, part of an object, or end effector. In this work, we propose the Transporter Network, a simple model architecture that rearranges deep features to infer spatial displacements from visual input - which can parameterize robot actions. It makes no assumptions of objectness (e.g. canonical poses, models, or keypoints), it exploits spatial symmetries, and is orders of magnitude more sample efficient than our benchmarked alternatives in learning vision-based manipulation tasks: from stacking a pyramid of blocks, to assembling kits with unseen objects; from manipulating deformable ropes, to pushing piles of small objects with closed-loop feedback. Our method can represent complex multi-modal policy distributions and generalizes to multi-step sequential tasks, as well as 6DoF pick-and-place. Experiments on 10 simulated tasks show that it learns faster and generalizes better than a variety of end-to-end baselines, including policies that use ground-truth object poses. We validate our methods with hardware in the real world. Experiment videos and code will be made available at https://transporternets.github.io
ADAIL: Adaptive Adversarial Imitation Learning
Aug 23, 2020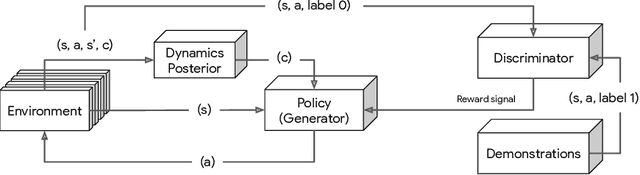
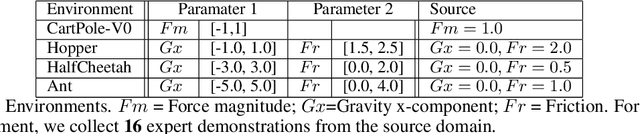
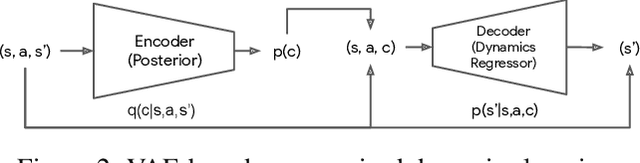

We present the ADaptive Adversarial Imitation Learning (ADAIL) algorithm for learning adaptive policies that can be transferred between environments of varying dynamics, by imitating a small number of demonstrations collected from a single source domain. This is an important problem in robotic learning because in real world scenarios 1) reward functions are hard to obtain, 2) learned policies from one domain are difficult to deploy in another due to varying source to target domain statistics, 3) collecting expert demonstrations in multiple environments where the dynamics are known and controlled is often infeasible. We address these constraints by building upon recent advances in adversarial imitation learning; we condition our policy on a learned dynamics embedding and we employ a domain-adversarial loss to learn a dynamics-invariant discriminator. The effectiveness of our method is demonstrated on simulated control tasks with varying environment dynamics and the learned adaptive agent outperforms several recent baselines.