 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlack-box Smoothing: A Provable Defense for Pretrained Classifiers
Mar 04, 2020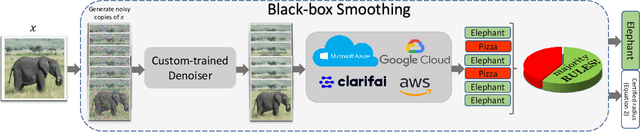


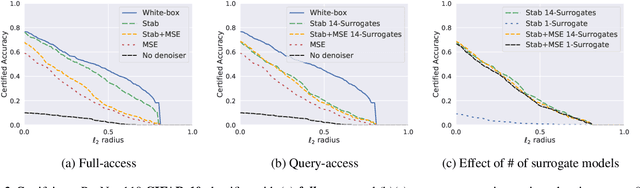
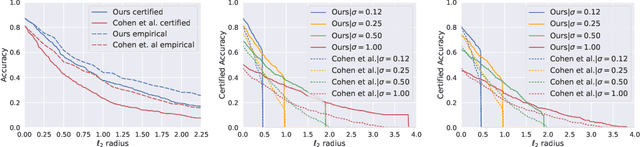
We present a method for provably defending any pretrained image classifier against $\ell_p$ adversarial attacks. By prepending a custom-trained denoiser to any off-the-shelf image classifier and using randomized smoothing, we effectively create a new classifier that is guaranteed to be $\ell_p$-robust to adversarial examples, without modifying the pretrained classifier. The approach applies both to the case where we have full access to the pretrained classifier as well as the case where we only have query access. We refer to this defense as black-box smoothing, and we demonstrate its effectiveness through extensive experimentation on ImageNet and CIFAR-10. Finally, we use our method to provably defend the Azure, Google, AWS, and ClarifAI image classification APIs. Our code replicating all the experiments in the paper can be found at https://github.com/microsoft/blackbox-smoothing .
A Fine-Grained Spectral Perspective on Neural Networks
Jul 24, 2019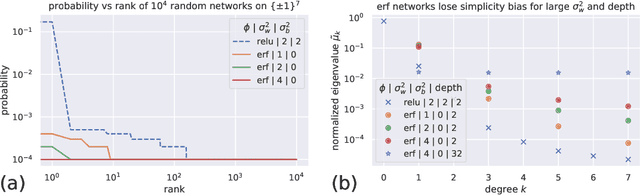
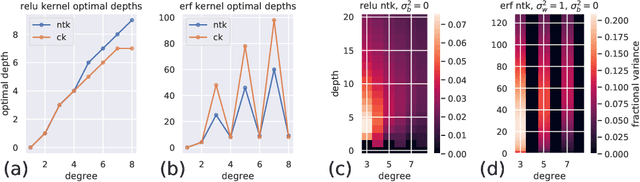
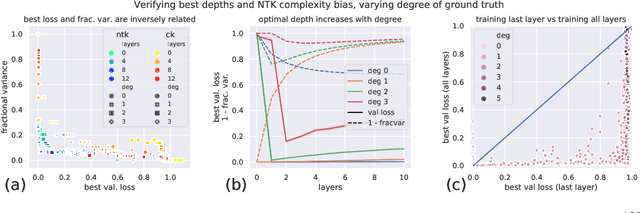
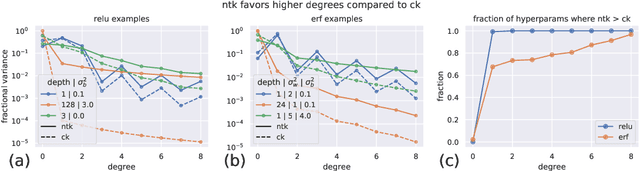
Are neural networks biased toward simple functions? Does depth always help learn more complex features? Is training the last layer of a network as good as training all layers? These questions seem unrelated at face value, but in this work we give all of them a common treatment from the spectral perspective. We will study the spectra of the *Conjugate Kernel*, CK, (also called the *Neural Network-Gaussian Process Kernel*), and the *Neural Tangent Kernel*, NTK. Roughly, the CK and the NTK tell us respectively "what a network looks like at initialization"and "what a network looks like during and after training." Their spectra then encode valuable information about the initial distribution and the training and generalization properties of neural networks. By analyzing the eigenvalues, we lend novel insights into the questions put forth at the beginning, and we verify these insights by extensive experiments of neural networks. We believe the computational tools we develop here for analyzing the spectra of CK and NTK serve as a solid foundation for future studies of deep neural networks. We have open-sourced the code for it and for generating the plots in this paper at github.com/thegregyang/NNspectra.
Provably Robust Deep Learning via Adversarially Trained Smoothed Classifiers
Jun 12, 2019

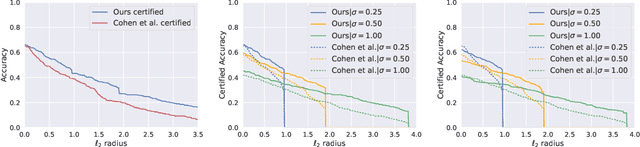
Recent works have shown the effectiveness of randomized smoothing as a scalable technique for building neural network-based classifiers that are provably robust to $\ell_2$-norm adversarial perturbations. In this paper, we employ adversarial training to improve the performance of randomized smoothing. We design an adapted attack for smoothed classifiers, and we show how this attack can be used in an adversarial training setting to boost the provable robustness of smoothed classifiers. We demonstrate through extensive experimentation that our method consistently outperforms all existing provably $\ell_2$-robust classifiers by a significant margin on ImageNet and CIFAR-10, establishing the state-of-the-art for provable $\ell_2$-defenses. Our code and trained models are available at http://github.com/Hadisalman/smoothing-adversarial .
A Convex Relaxation Barrier to Tight Robustness Verification of Neural Networks
Feb 26, 2019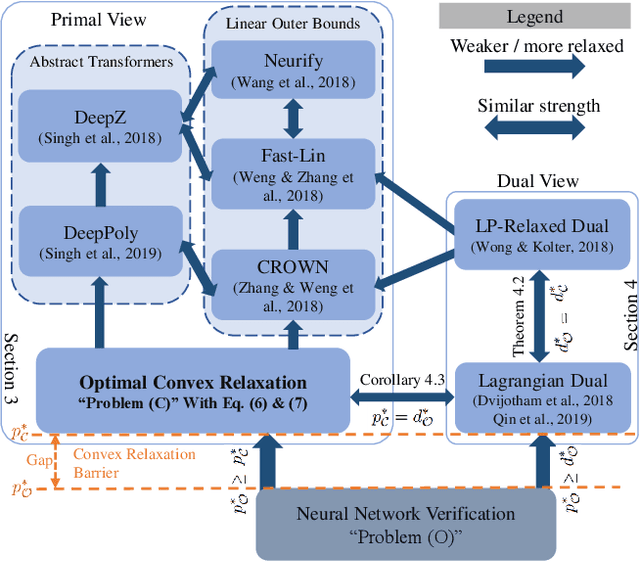
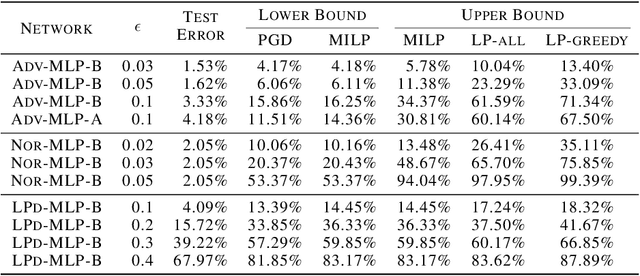

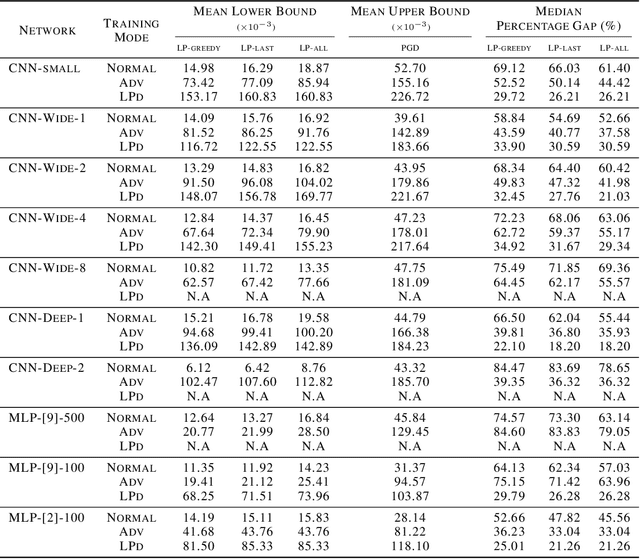
Verification of neural networks enables us to gauge their robustness against adversarial attacks. Verification algorithms fall into two categories: exact verifiers that run in exponential time and relaxed verifiers that are efficient but incomplete. In this paper, we unify all existing LP-relaxed verifiers, to the best of our knowledge, under a general convex relaxation framework. This framework works for neural networks with diverse architectures and nonlinearities and covers both primal and dual views of robustness verification. We further prove strong duality between the primal and dual problems under very mild conditions. Next, we perform large-scale experiments, amounting to more than 22 CPU-years, to obtain exact solution to the convex-relaxed problem that is optimal within our framework for ReLU networks. We find the exact solution does not significantly improve upon the gap between PGD and existing relaxed verifiers for various networks trained normally or robustly on MNIST and CIFAR datasets. Our results suggest there is an inherent barrier to tight verification for the large class of methods captured by our framework. We discuss possible causes of this barrier and potential future directions for bypassing it.
Deep Diffeomorphic Normalizing Flows
Oct 08, 2018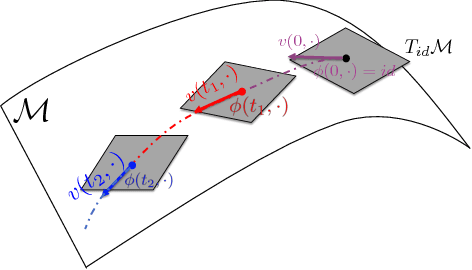
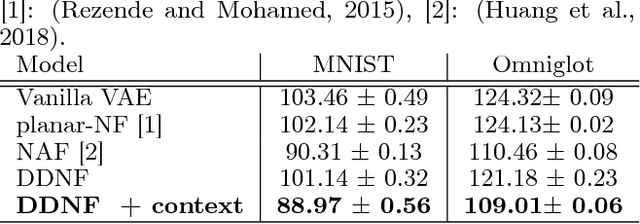
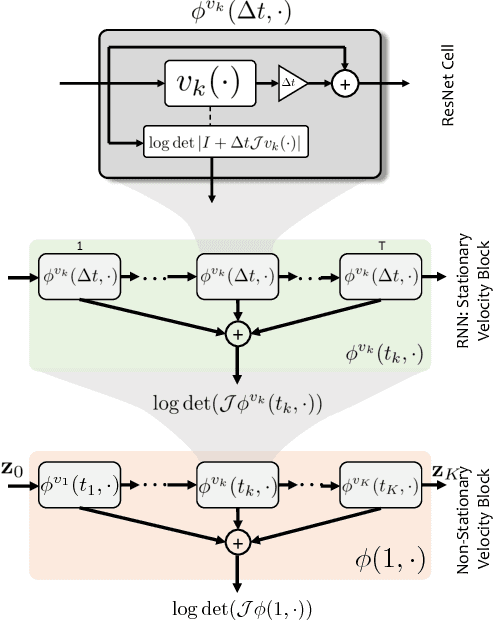
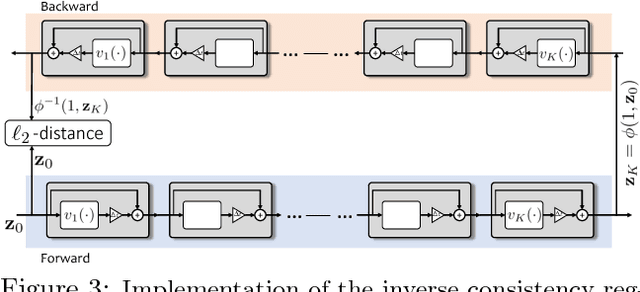
The Normalizing Flow (NF) models a general probability density by estimating an invertible transformation applied on samples drawn from a known distribution. We introduce a new type of NF, called Deep Diffeomorphic Normalizing Flow (DDNF). A diffeomorphic flow is an invertible function where both the function and its inverse are smooth. We construct the flow using an ordinary differential equation (ODE) governed by a time-varying smooth vector field. We use a neural network to parametrize the smooth vector field and a recursive neural network (RNN) for approximating the solution of the ODE. Each cell in the RNN is a residual network implementing one Euler integration step. The architecture of our flow enables efficient likelihood evaluation, straightforward flow inversion, and results in highly flexible density estimation. An end-to-end trained DDNF achieves competitive results with state-of-the-art methods on a suite of density estimation and variational inference tasks. Finally, our method brings concepts from Riemannian geometry that, we believe, can open a new research direction for neural density estimation.
Trajectory-Optimized Sensing for Active Search of Tissue Abnormalities in Robotic Surgery
May 16, 2018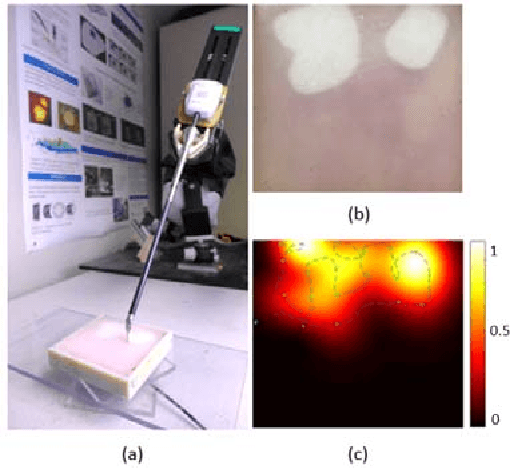
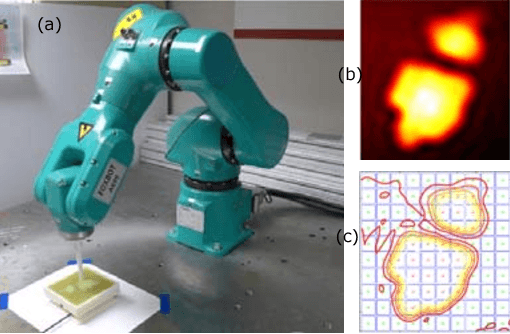
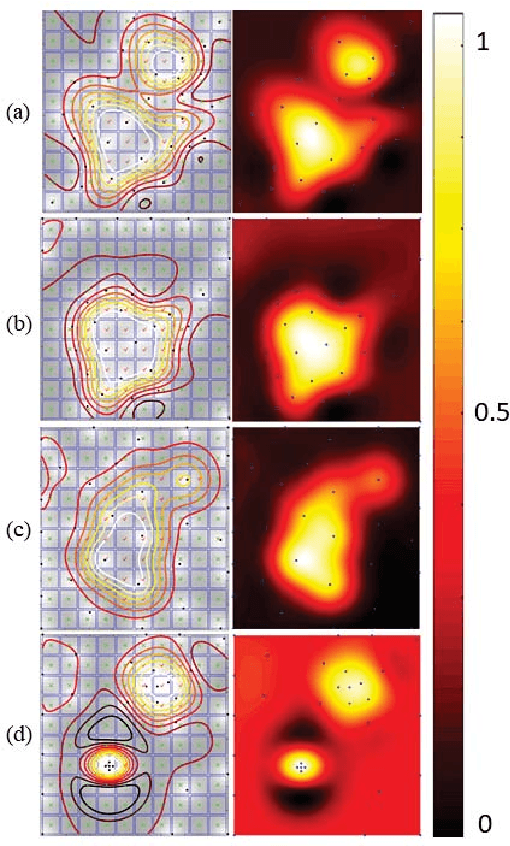
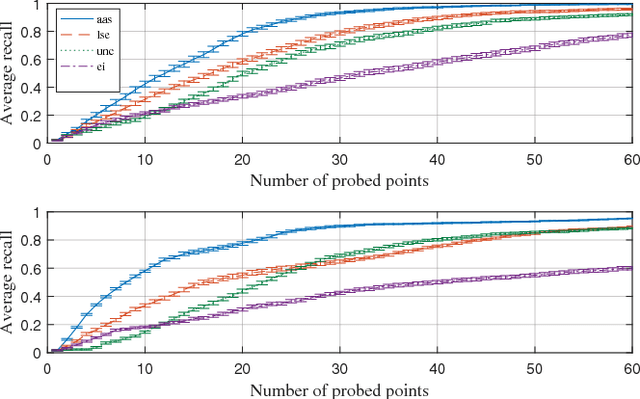
In this work, we develop an approach for guiding robots to automatically localize and find the shapes of tumors and other stiff inclusions present in the anatomy. Our approach uses Gaussian processes to model the stiffness distribution and active learning to direct the palpation path of the robot. The palpation paths are chosen such that they maximize an acquisition function provided by an active learning algorithm. Our approach provides the flexibility to avoid obstacles in the robot's path, incorporate uncertainties in robot position and sensor measurements, include prior information about location of stiff inclusions while respecting the robot-kinematics. To the best of our knowledge this is the first work in literature that considers all the above conditions while localizing tumors. The proposed framework is evaluated via simulation and experimentation on three different robot platforms: 6-DoF industrial arm, da Vinci Research Kit (dVRK), and the Insertable Robotic Effector Platform (IREP). Results show that our approach can accurately estimate the locations and boundaries of the stiff inclusions while reducing exploration time.
Learning to Sequence Robot Behaviors for Visual Navigation
Mar 26, 2018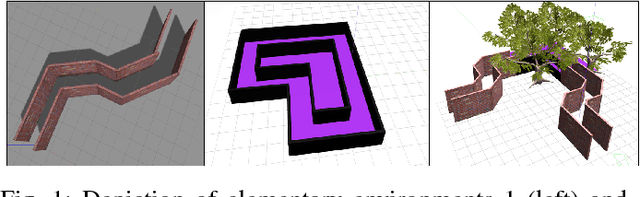
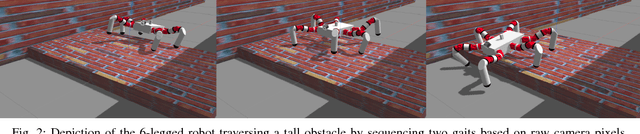
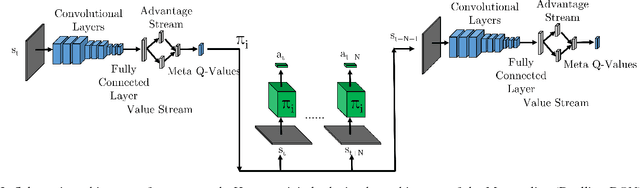
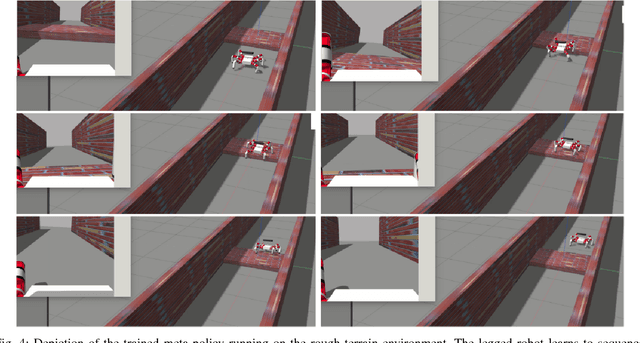
Recent literature in the robotics community has focused on learning robot behaviors that abstract out lower-level details of robot control. To fully leverage the efficacy of such behaviors, it is necessary to select and sequence them to achieve a given task. In this paper, we present an approach to both learn and sequence robot behaviors, applied to the problem of visual navigation of mobile robots. We construct a layered representation of control policies composed of low- level behaviors and a meta-level policy. The low-level behaviors enable the robot to locomote in a particular environment while avoiding obstacles, and the meta-level policy actively selects the low-level behavior most appropriate for the current situation based purely on visual feedback. We demonstrate the effectiveness of our method on three simulated robot navigation tasks: a legged hexapod robot which must successfully traverse varying terrain, a wheeled robot which must navigate a maze-like course while avoiding obstacles, and finally a wheeled robot navigating in the presence of dynamic obstacles. We show that by learning control policies in a layered manner, we gain the ability to successfully traverse new compound environments composed of distinct sub-environments, and outperform both the low-level behaviors in their respective sub-environments, as well as a hand-crafted selection of low-level policies on these compound environments.
A surgical system for automatic registration, stiffness mapping and dynamic image overlay
Nov 23, 2017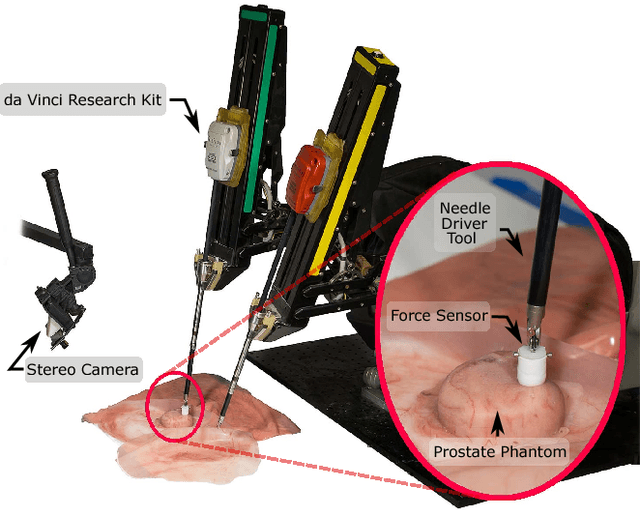
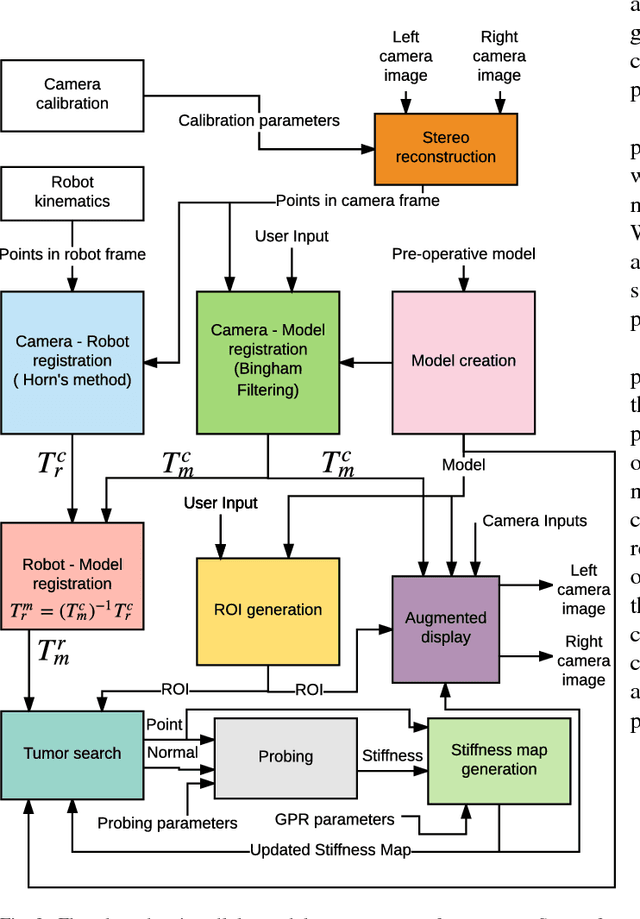
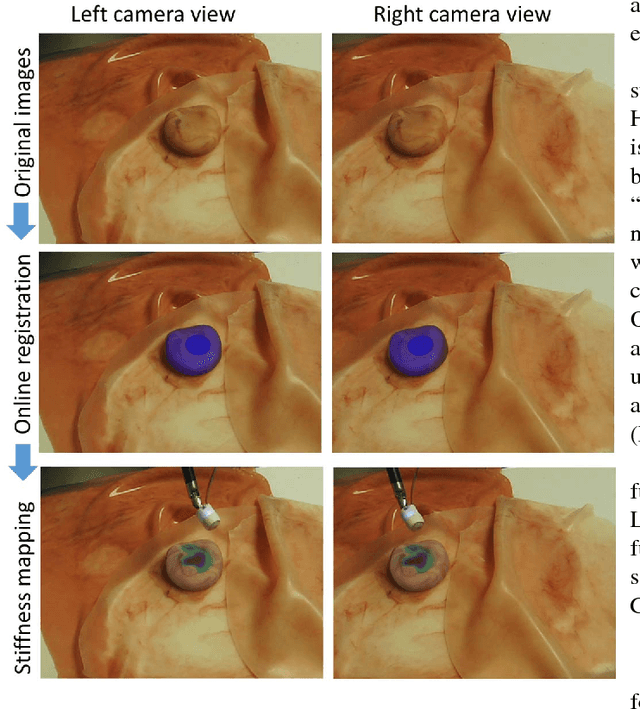
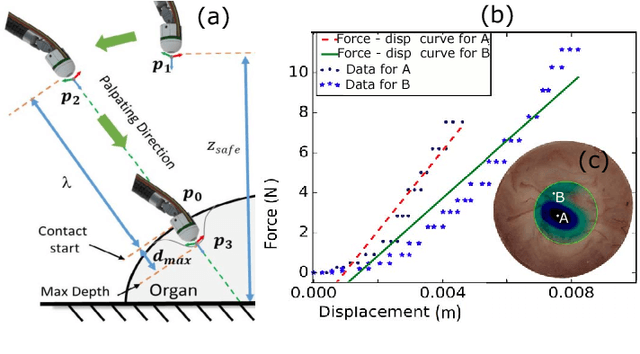
In this paper we develop a surgical system using the da Vinci research kit (dVRK) that is capable of autonomously searching for tumors and dynamically displaying the tumor location using augmented reality. Such a system has the potential to quickly reveal the location and shape of tumors and visually overlay that information to reduce the cognitive overload of the surgeon. We believe that our approach is one of the first to incorporate state-of-the-art methods in registration, force sensing and tumor localization into a unified surgical system. First, the preoperative model is registered to the intra-operative scene using a Bingham distribution-based filtering approach. An active level set estimation is then used to find the location and the shape of the tumors. We use a recently developed miniature force sensor to perform the palpation. The estimated stiffness map is then dynamically overlaid onto the registered preoperative model of the organ. We demonstrate the efficacy of our system by performing experiments on phantom prostate models with embedded stiff inclusions.
Ergodic Coverage In Constrained Environments Using Stochastic Trajectory Optimization
Jul 22, 2017
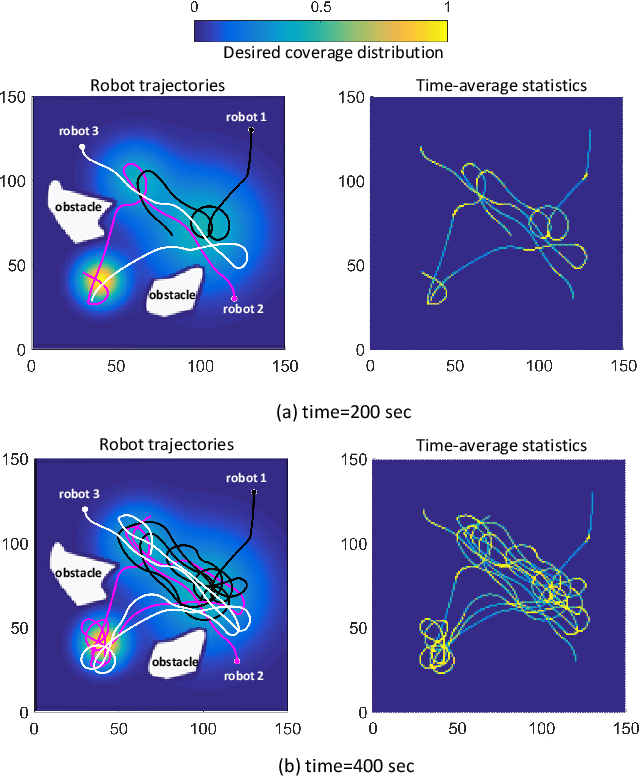
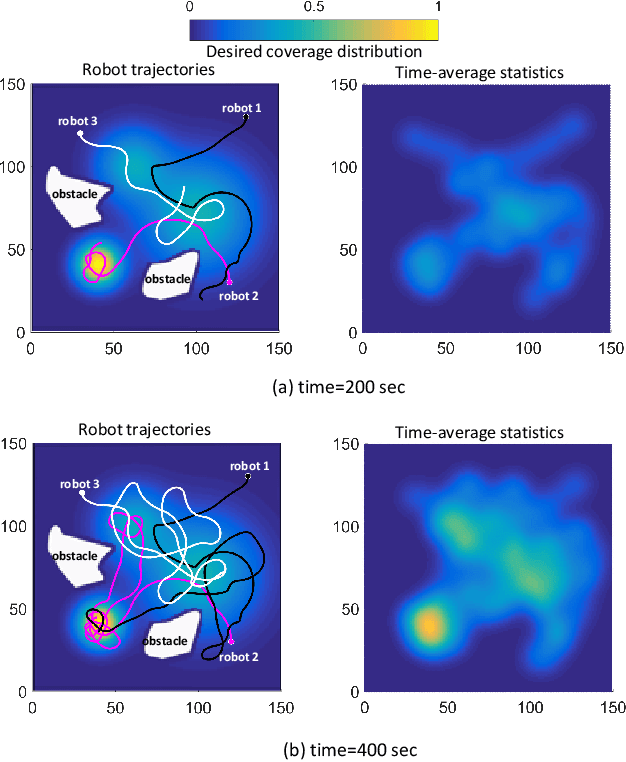
In search and surveillance applications in robotics, it is intuitive to spatially distribute robot trajectories with respect to the probability of locating targets in the domain. Ergodic coverage is one such approach to trajectory planning in which a robot is directed such that the percentage of time spent in a region is in proportion to the probability of locating targets in that region. In this work, we extend the ergodic coverage algorithm to robots operating in constrained environments and present a formulation that can capture sensor footprint and avoid obstacles and restricted areas in the domain. We demonstrate that our formulation easily extends to coordination of multiple robots equipped with different sensing capabilities to perform ergodic coverage of a domain.