 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory-Optimized Sensing for Active Search of Tissue Abnormalities in Robotic Surgery
Paper and Code
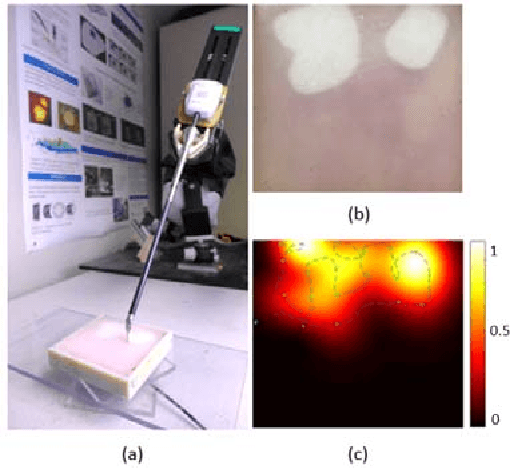
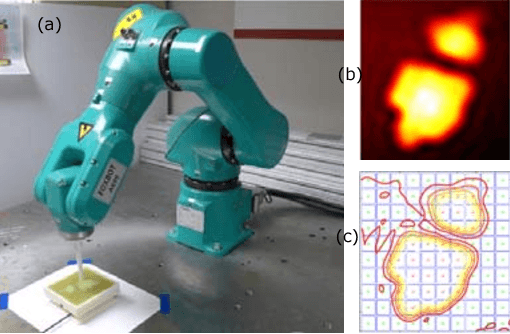
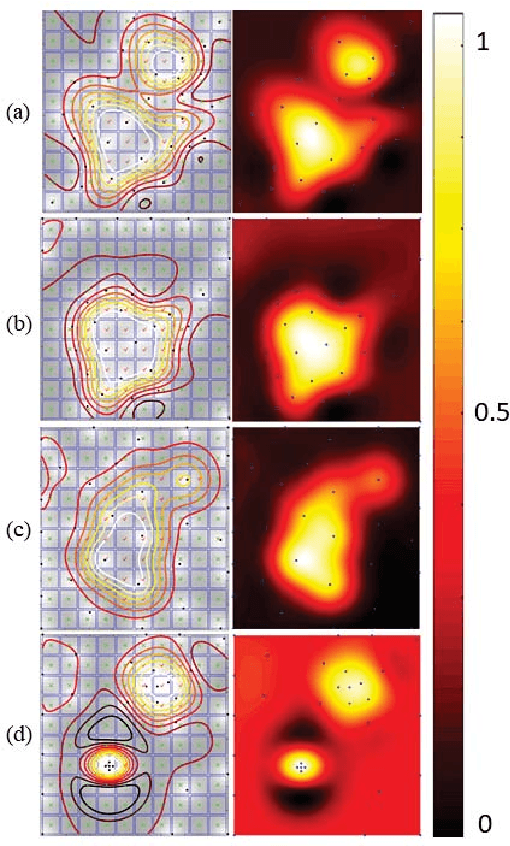
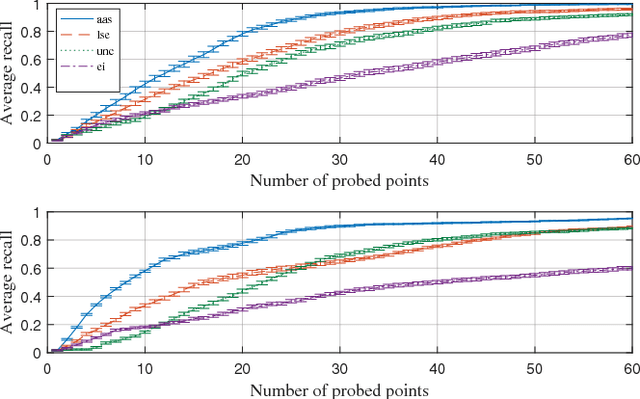
In this work, we develop an approach for guiding robots to automatically localize and find the shapes of tumors and other stiff inclusions present in the anatomy. Our approach uses Gaussian processes to model the stiffness distribution and active learning to direct the palpation path of the robot. The palpation paths are chosen such that they maximize an acquisition function provided by an active learning algorithm. Our approach provides the flexibility to avoid obstacles in the robot's path, incorporate uncertainties in robot position and sensor measurements, include prior information about location of stiff inclusions while respecting the robot-kinematics. To the best of our knowledge this is the first work in literature that considers all the above conditions while localizing tumors. The proposed framework is evaluated via simulation and experimentation on three different robot platforms: 6-DoF industrial arm, da Vinci Research Kit (dVRK), and the Insertable Robotic Effector Platform (IREP). Results show that our approach can accurately estimate the locations and boundaries of the stiff inclusions while reducing exploration time.