 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiSECt: A Differentiable Simulation Engine for Autonomous Robotic Cutting
May 25, 2021
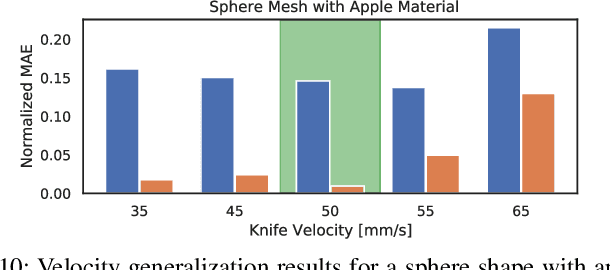
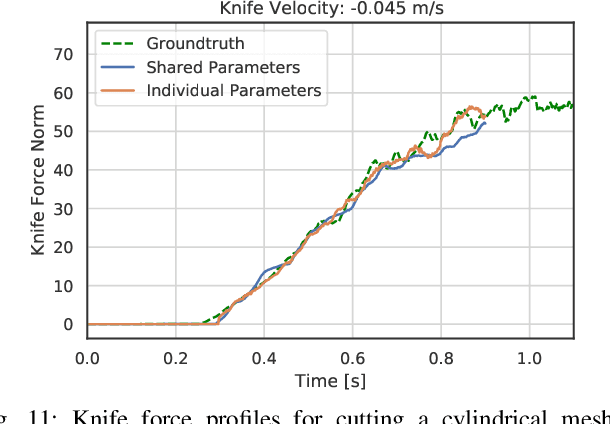
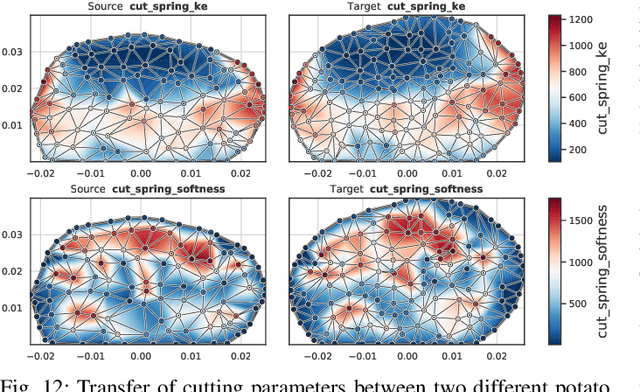
Robotic cutting of soft materials is critical for applications such as food processing, household automation, and surgical manipulation. As in other areas of robotics, simulators can facilitate controller verification, policy learning, and dataset generation. Moreover, differentiable simulators can enable gradient-based optimization, which is invaluable for calibrating simulation parameters and optimizing controllers. In this work, we present DiSECt: the first differentiable simulator for cutting soft materials. The simulator augments the finite element method (FEM) with a continuous contact model based on signed distance fields (SDF), as well as a continuous damage model that inserts springs on opposite sides of the cutting plane and allows them to weaken until zero stiffness, enabling crack formation. Through various experiments, we evaluate the performance of the simulator. We first show that the simulator can be calibrated to match resultant forces and deformation fields from a state-of-the-art commercial solver and real-world cutting datasets, with generality across cutting velocities and object instances. We then show that Bayesian inference can be performed efficiently by leveraging the differentiability of the simulator, estimating posteriors over hundreds of parameters in a fraction of the time of derivative-free methods. Finally, we illustrate that control parameters in the simulation can be optimized to minimize cutting forces via lateral slicing motions. We publish videos and additional results on our project website at https://diff-cutting-sim.github.io.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021



This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
NeuralSim: Augmenting Differentiable Simulators with Neural Networks
Nov 09, 2020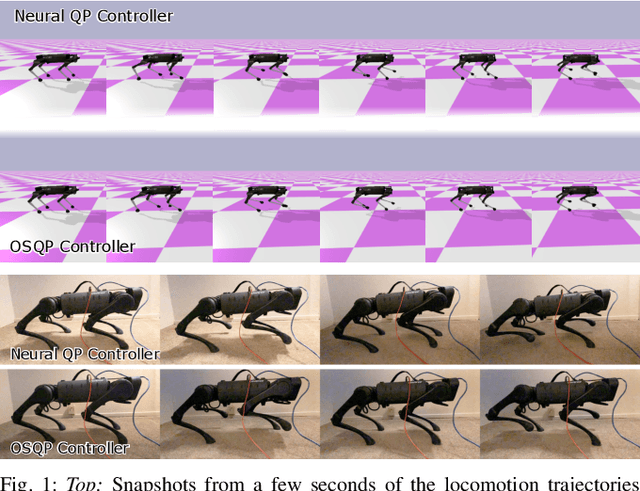
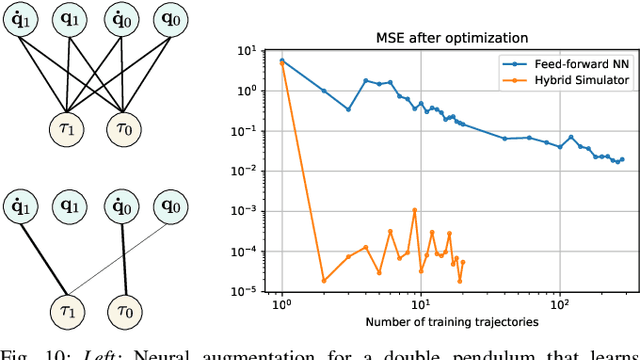
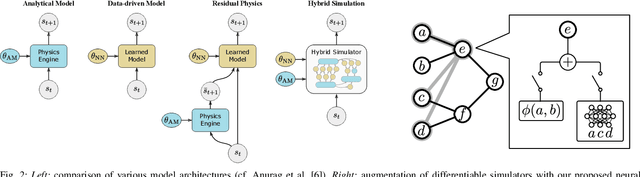
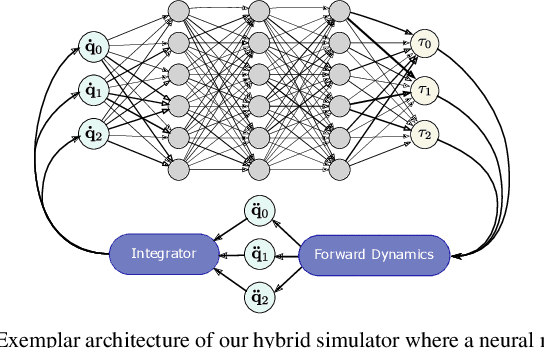
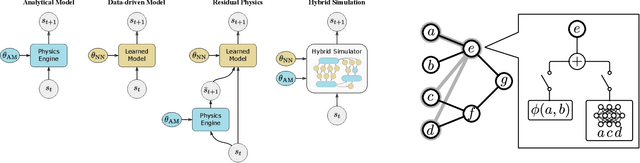
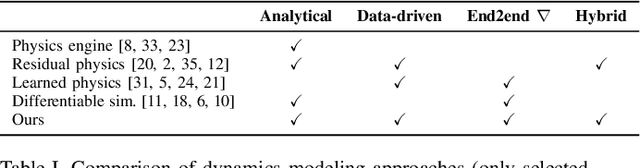
Differentiable simulators provide an avenue for closing the sim-to-real gap by enabling the use of efficient, gradient-based optimization algorithms to find the simulation parameters that best fit the observed sensor readings. Nonetheless, these analytical models can only predict the dynamical behavior of systems for which they have been designed. In this work, we study the augmentation of a novel differentiable rigid-body physics engine via neural networks that is able to learn nonlinear relationships between dynamic quantities and can thus learn effects not accounted for in traditional simulators.Such augmentations require less data to train and generalize better compared to entirely data-driven models. Through extensive experiments, we demonstrate the ability of our hybrid simulator to learn complex dynamics involving frictional contacts from real data, as well as match known models of viscous friction, and present an approach for automatically discovering useful augmentations. We show that, besides benefiting dynamics modeling, inserting neural networks can accelerate model-based control architectures. We observe a ten-fold speed-up when replacing the QP solver inside a model-predictive gait controller for quadruped robots with a neural network, allowing us to significantly improve control delays as we demonstrate in real-hardware experiments. We publish code, additional results and videos from our experiments on our project webpage at https://sites.google.com/usc.edu/neuralsim.
Augmenting Differentiable Simulators with Neural Networks to Close the Sim2Real Gap
Jul 12, 2020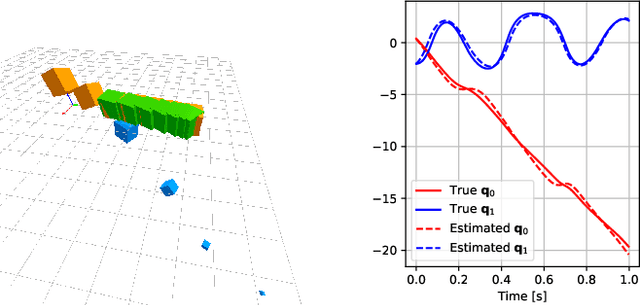
We present a differentiable simulation architecture for articulated rigid-body dynamics that enables the augmentation of analytical models with neural networks at any point of the computation. Through gradient-based optimization, identification of the simulation parameters and network weights is performed efficiently in preliminary experiments on a real-world dataset and in sim2sim transfer applications, while poor local optima are overcome through a random search approach.
Confidence-rich grid mapping
Jun 29, 2020
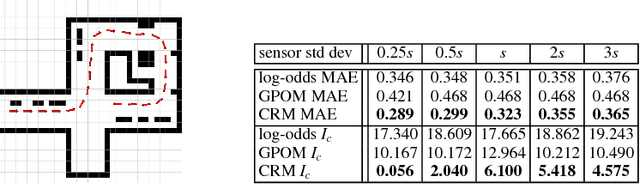
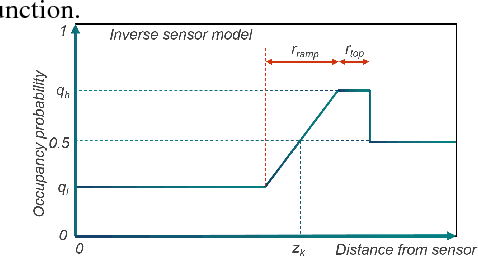
Representing the environment is a fundamental task in enabling robots to act autonomously in unknown environments. In this work, we present confidence-rich mapping (CRM), a new algorithm for spatial grid-based mapping of the 3D environment. CRM augments the occupancy level at each voxel by its confidence value. By explicitly storing and evolving confidence values using the CRM filter, CRM extends traditional grid mapping in three ways: first, it partially maintains the probabilistic dependence among voxels. Second, it relaxes the need for hand-engineering an inverse sensor model and proposes the concept of sensor cause model that can be derived in a principled manner from the forward sensor model. Third, and most importantly, it provides consistent confidence values over the occupancy estimation that can be reliably used in collision risk evaluation and motion planning. CRM runs online and enables mapping environments where voxels might be partially occupied. We demonstrate the performance of the method on various datasets and environments in simulation and on physical systems. We show in real-world experiments that, in addition to achieving maps that are more accurate than traditional methods, the proposed filtering scheme demonstrates a much higher level of consistency between its error and the reported confidence, hence, enabling a more reliable collision risk evaluation for motion planning.
* Published at International Journal of Robotics Research (IJRR) 2019 (https://journals.sagepub.com/doi/10.1177/0278364919839762)
Experimental Comparison of Global Motion Planning Algorithms for Wheeled Mobile Robots
Mar 07, 2020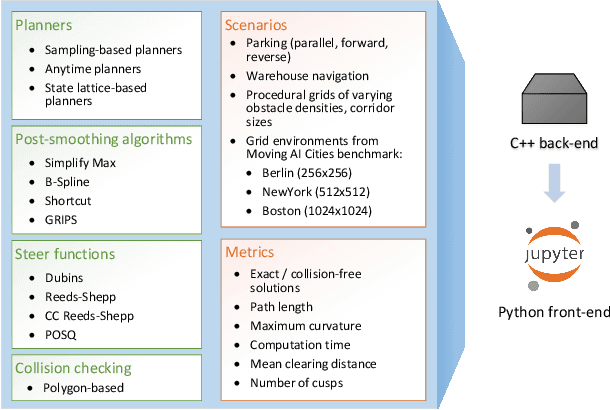
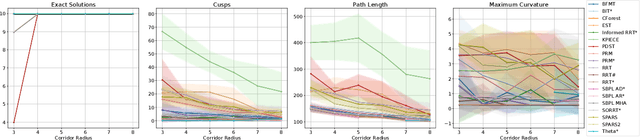
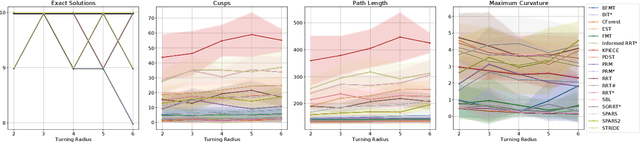
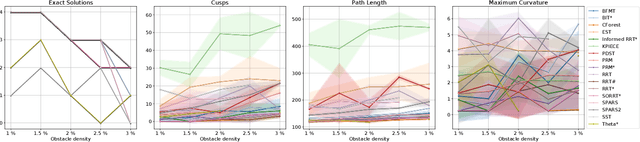
Planning smooth and energy-efficient motions for wheeled mobile robots is a central task for applications ranging from autonomous driving to service and intralogistic robotics. Over the past decades, a wide variety of motion planners, steer functions and path-improvement techniques have been proposed for such non-holonomic systems. With the objective of comparing this large assortment of state-of-the-art motion-planning techniques, we introduce a novel open-source motion-planning benchmark for wheeled mobile robots, whose scenarios resemble real-world applications (such as navigating warehouses, moving in cluttered cities or parking), and propose metrics for planning efficiency and path quality. Our benchmark is easy to use and extend, and thus allows practitioners and researchers to evaluate new motion-planning algorithms, scenarios and metrics easily. We use our benchmark to highlight the strengths and weaknesses of several common state-of-the-art motion planners and provide recommendations on when they should be used.
LAMP: Large-Scale Autonomous Mapping and Positioning for Exploration of Perceptually-Degraded Subterranean Environments
Mar 05, 2020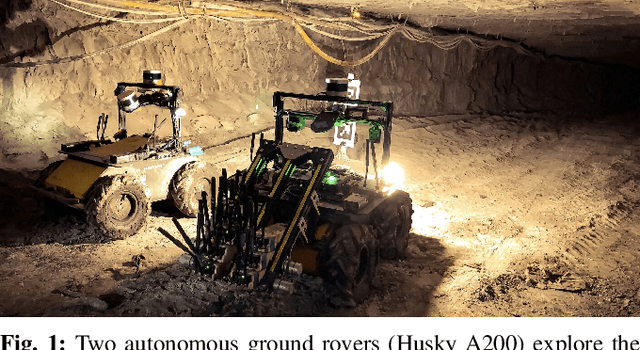
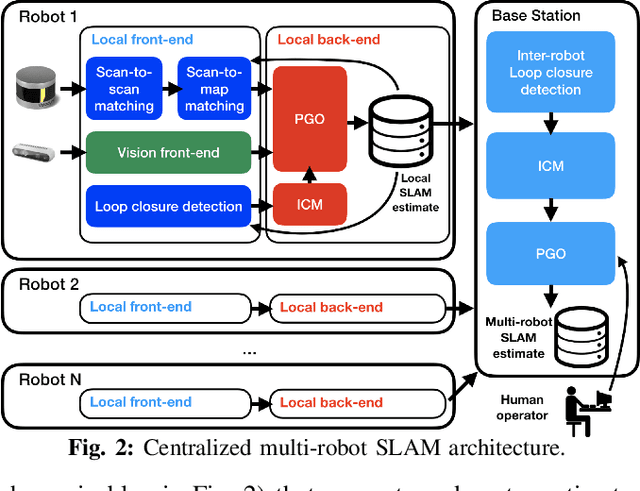
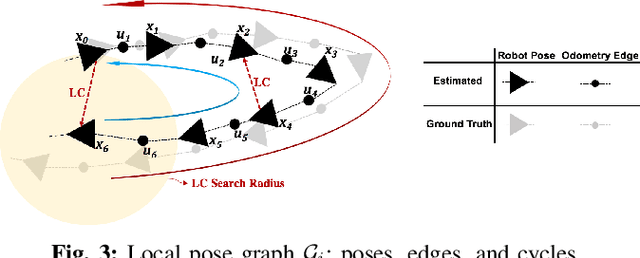
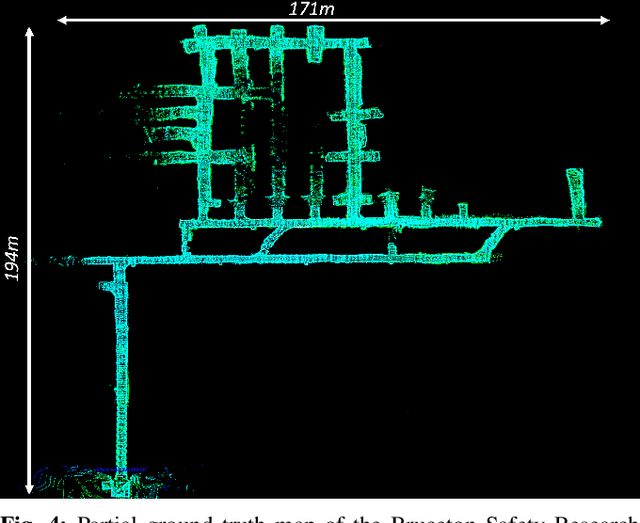
Simultaneous Localization and Mapping (SLAM) in large-scale, unknown, and complex subterranean environments is a challenging problem. Sensors must operate in off-nominal conditions; uneven and slippery terrains make wheel odometry inaccurate, while long corridors without salient features make exteroceptive sensing ambiguous and prone to drift; finally, spurious loop closures that are frequent in environments with repetitive appearance, such as tunnels and mines, could result in a significant distortion of the entire map. These challenges are in stark contrast with the need to build highly-accurate 3D maps to support a wide variety of applications, ranging from disaster response to the exploration of underground extraterrestrial worlds. This paper reports on the implementation and testing of a lidar-based multi-robot SLAM system developed in the context of the DARPA Subterranean Challenge. We present a system architecture to enhance subterranean operation, including an accurate lidar-based front-end, and a flexible and robust back-end that automatically rejects outlying loop closures. We present an extensive evaluation in large-scale, challenging subterranean environments, including the results obtained in the Tunnel Circuit of the DARPA Subterranean Challenge. Finally, we discuss potential improvements, limitations of the state of the art, and future research directions.
Automatic Differentiation and Continuous Sensitivity Analysis of Rigid Body Dynamics
Jan 22, 2020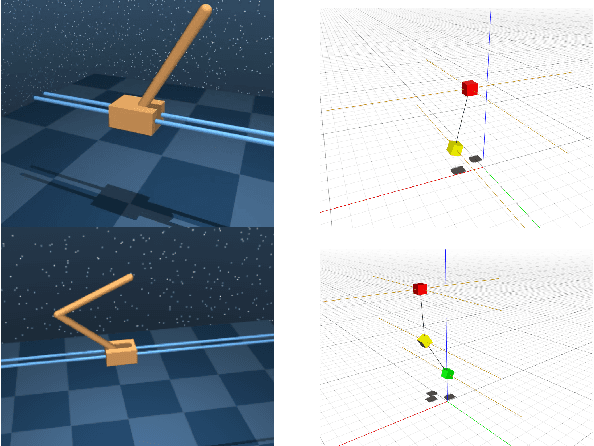

A key ingredient to achieving intelligent behavior is physical understanding that equips robots with the ability to reason about the effects of their actions in a dynamic environment. Several methods have been proposed to learn dynamics models from data that inform model-based control algorithms. While such learning-based approaches can model locally observed behaviors, they fail to generalize to more complex dynamics and under long time horizons. In this work, we introduce a differentiable physics simulator for rigid body dynamics. Leveraging various techniques for differential equation integration and gradient calculation, we compare different methods for parameter estimation that allow us to infer the simulation parameters that are relevant to estimation and control of physical systems. In the context of trajectory optimization, we introduce a closed-loop model-predictive control algorithm that infers the simulation parameters through experience while achieving cost-minimizing performance.
Physics-based Simulation of Continuous-Wave LIDAR for Localization, Calibration and Tracking
Dec 03, 2019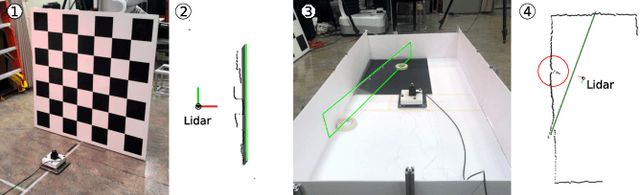
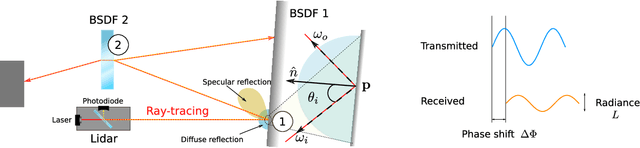

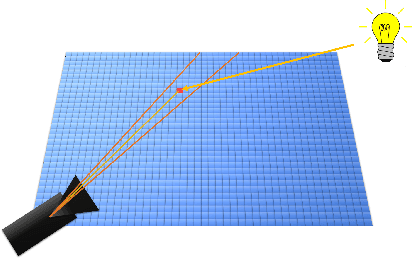
Light Detection and Ranging (LIDAR) sensors play an important role in the perception stack of autonomous robots, supplying mapping and localization pipelines with depth measurements of the environment. While their accuracy outperforms other types of depth sensors, such as stereo or time-of-flight cameras, the accurate modeling of LIDAR sensors requires laborious manual calibration that typically does not take into account the interaction of laser light with different surface types, incidence angles and other phenomena that significantly influence measurements. In this work, we introduce a physically plausible model of a 2D continuous-wave LIDAR that accounts for the surface-light interactions and simulates the measurement process in the Hokuyo URG-04LX LIDAR. Through automatic differentiation, we employ gradient-based optimization to estimate model parameters from real sensor measurements.
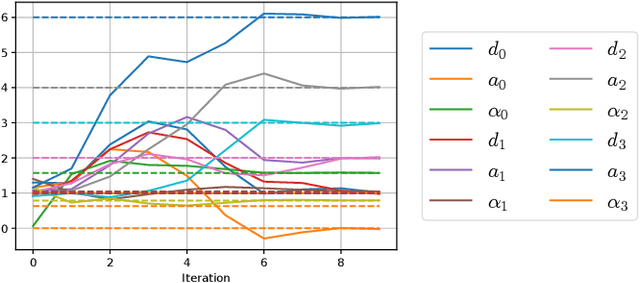
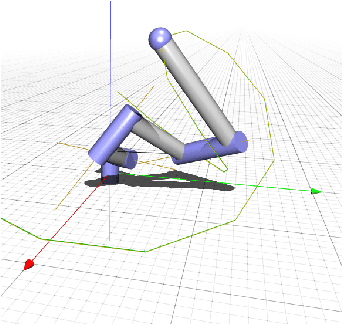
Interactive Differentiable Simulation
May 26, 2019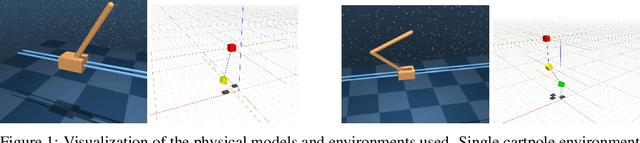
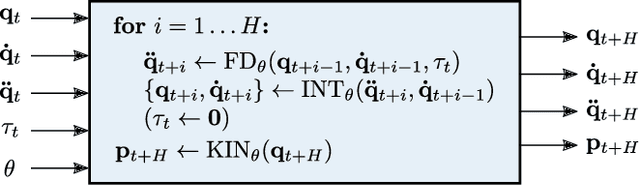
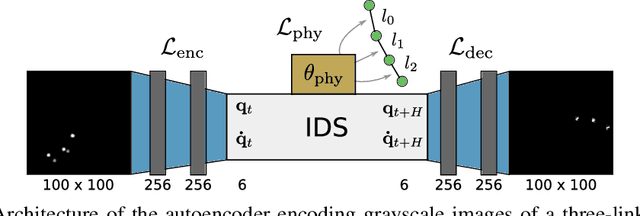
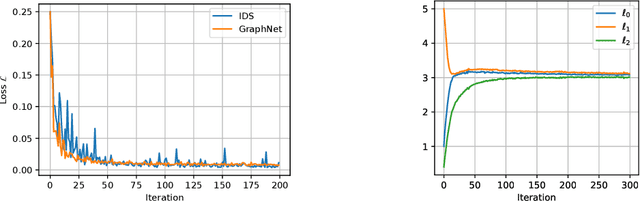
Intelligent agents need a physical understanding of the world to predict the impact of their actions in the future. While learning-based models of the environment dynamics have contributed to significant improvements in sample efficiency compared to model-free reinforcement learning algorithms, they typically fail to generalize to system states beyond the training data, while often grounding their predictions on non-interpretable latent variables. We introduce Interactive Differentiable Simulation (IDS), a differentiable physics engine, that allows for efficient, accurate inference of physical properties of rigid-body systems. Integrated into deep learning architectures, our model is able to accomplish system identification using visual input, leading to an interpretable model of the world whose parameters have physical meaning. We present experiments showing automatic task-based robot design and parameter estimation for nonlinear dynamical systems by automatically calculating gradients in IDS. When integrated into an adaptive model-predictive control algorithm, our approach exhibits orders of magnitude improvements in sample efficiency over model-free reinforcement learning algorithms on challenging nonlinear control domains.