 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive and Risk-Aware Target Tracking with Heterogeneous Robot Teams
May 09, 2021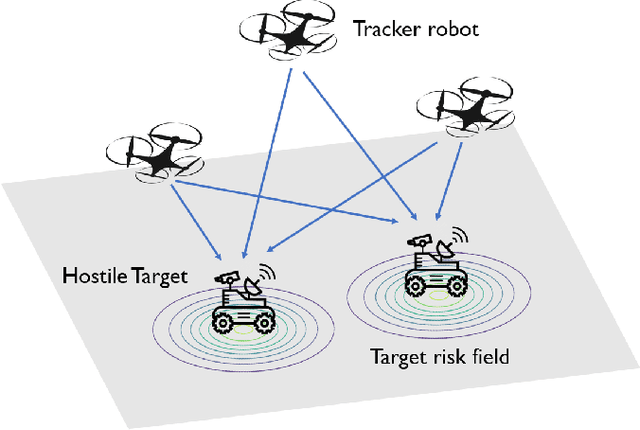
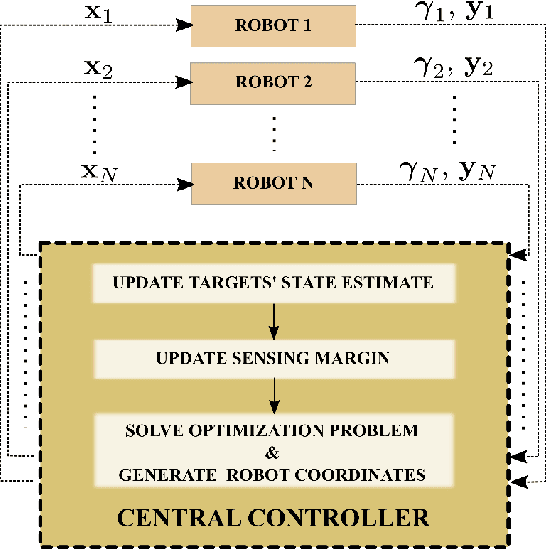
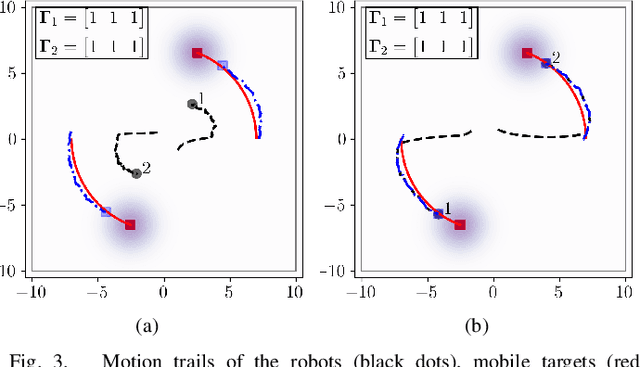
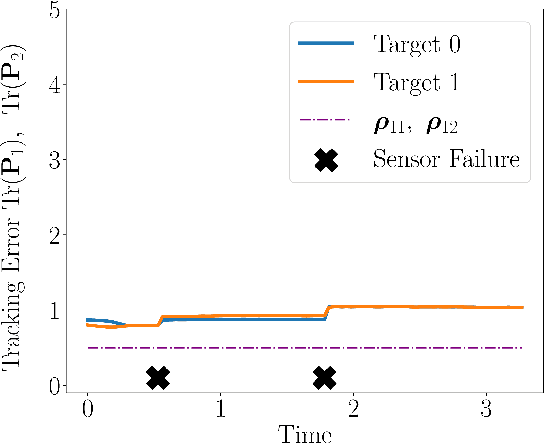
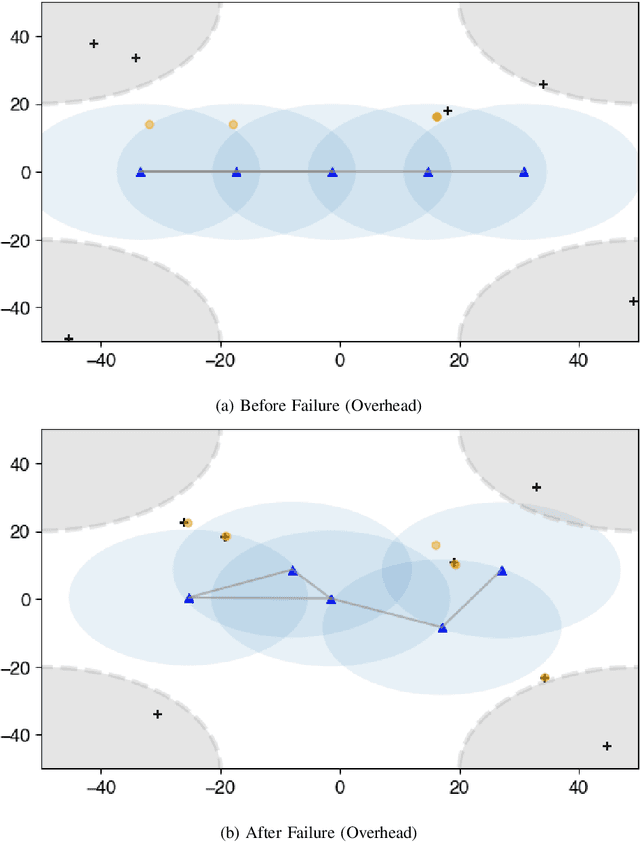
We consider a scenario where a team of robots with heterogeneous sensors must track a set of hostile targets which induce sensory failures on the robots. In particular, the likelihood of failures depends on the proximity between the targets and the robots. We propose a control framework that implicitly addresses the competing objectives of performance maximization and sensor preservation (which impacts the future performance of the team). Our framework consists of a predictive component -- which accounts for the risk of being detected by the target, and a reactive component -- which maximizes the performance of the team regardless of the failures that have already occurred. Based on a measure of the abundance of sensors in the team, our framework can generate aggressive and risk-averse robot configurations to track the targets. Crucially, the heterogeneous sensing capabilities of the robots are explicitly considered in each step, allowing for a more expressive risk-performance trade-off. Simulated experiments with induced sensor failures demonstrate the efficacy of the proposed approach.
Learning Equality Constraints for Motion Planning on Manifolds
Sep 24, 2020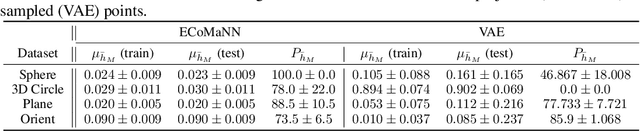
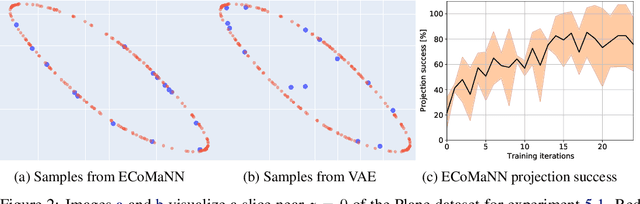
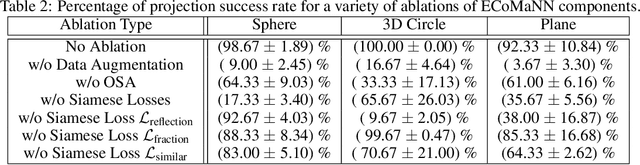
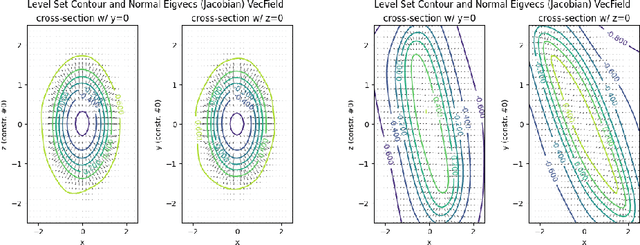
Constrained robot motion planning is a widely used technique to solve complex robot tasks. We consider the problem of learning representations of constraints from demonstrations with a deep neural network, which we call Equality Constraint Manifold Neural Network (ECoMaNN). The key idea is to learn a level-set function of the constraint suitable for integration into a constrained sampling-based motion planner. Learning proceeds by aligning subspaces in the network with subspaces of the data. We combine both learned constraints and analytically described constraints into the planner and use a projection-based strategy to find valid points. We evaluate ECoMaNN on its representation capabilities of constraint manifolds, the impact of its individual loss terms, and the motions produced when incorporated into a planner.
Resilient Monitoring in Heterogeneous Multi-robot Systems through Network Reconfiguration
Aug 04, 2020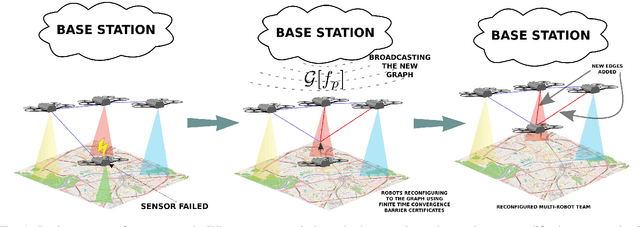
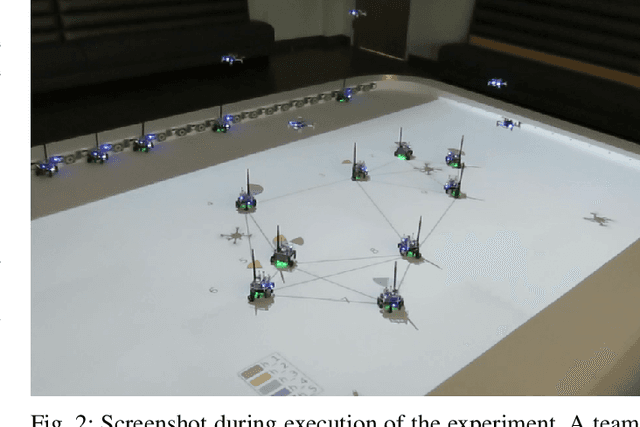
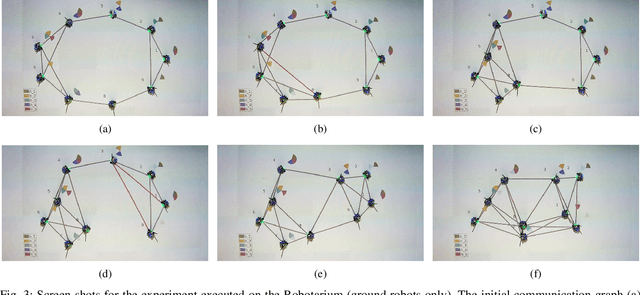
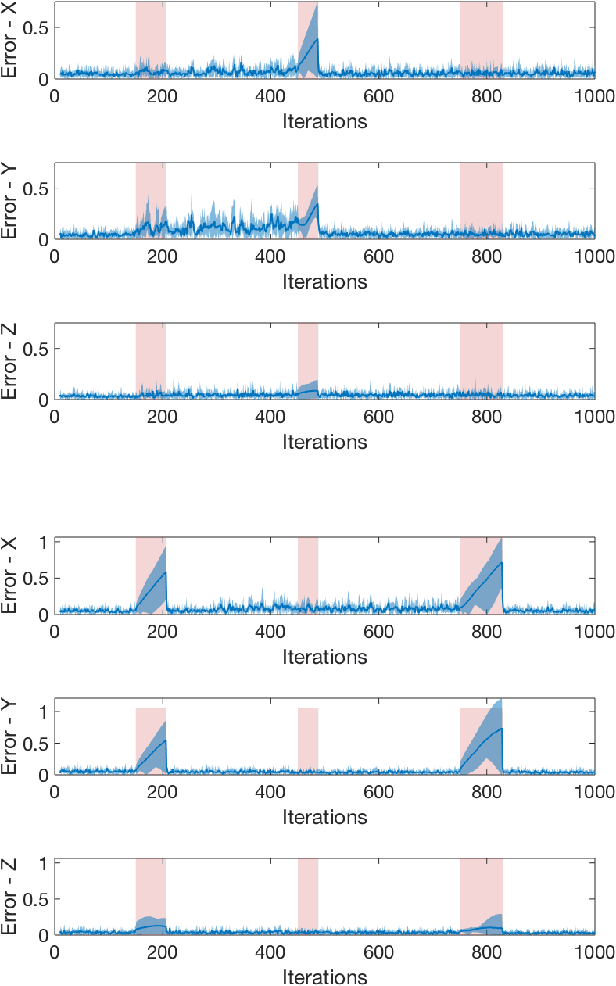
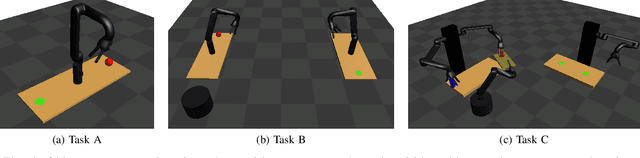
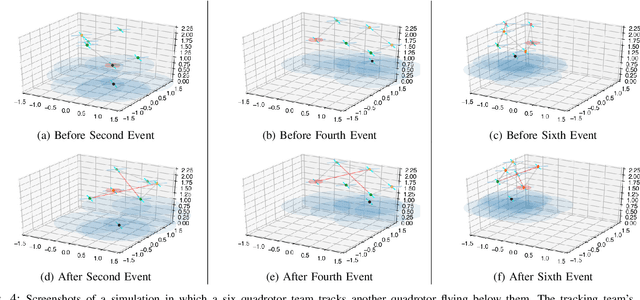
We propose a framework for resilience in a networked heterogeneous multi-robot team subject to resource failures. Each robot in the team is equipped with resources that it shares with its neighbors. Additionally, each robot in the team executes a task, whose performance depends on the resources to which it has access. When a resource on a particular robot becomes unavailable (\eg a camera ceases to function), the team optimally reconfigures its communication network so that the robots affected by the failure can continue their tasks. We focus on a monitoring task, where robots individually estimate the state of an exogenous process. We encode the end-to-end effect of a robot's resource loss on the monitoring performance of the team by defining a new stronger notion of observability -- \textit{one-hop observability}. By abstracting the impact that {low-level} individual resources have on the task performance through the notion of one-hop observability, our framework leads to the principled reconfiguration of information flow in the team to effectively replace the lost resource on one robot with information from another, as long as certain conditions are met. Network reconfiguration is converted to the problem of selecting edges to be modified in the system's communication graph after a resource failure has occurred. A controller based on finite-time convergence control barrier functions drives each robot to a spatial location that enables the communication links of the modified graph. We validate the effectiveness of our framework by deploying it on a team of differential-drive robots estimating the position of a group of quadrotors.
Learning Manifolds for Sequential Motion Planning
Jul 04, 2020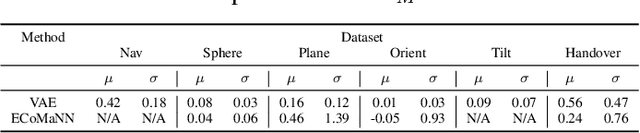

Motion planning with constraints is an important part of many real-world robotic systems. In this work, we study manifold learning methods to learn such constraints from data. We explore two methods for learning implicit constraint manifolds from data: Variational Autoencoders (VAE), and a new method, Equality Constraint Manifold Neural Network (ECoMaNN). With the aim of incorporating learned constraints into a sampling-based motion planning framework, we evaluate the approaches on their ability to learn representations of constraints from various datasets and on the quality of paths produced during planning.
Sampling-Based Motion Planning on Manifold Sequences
Jun 03, 2020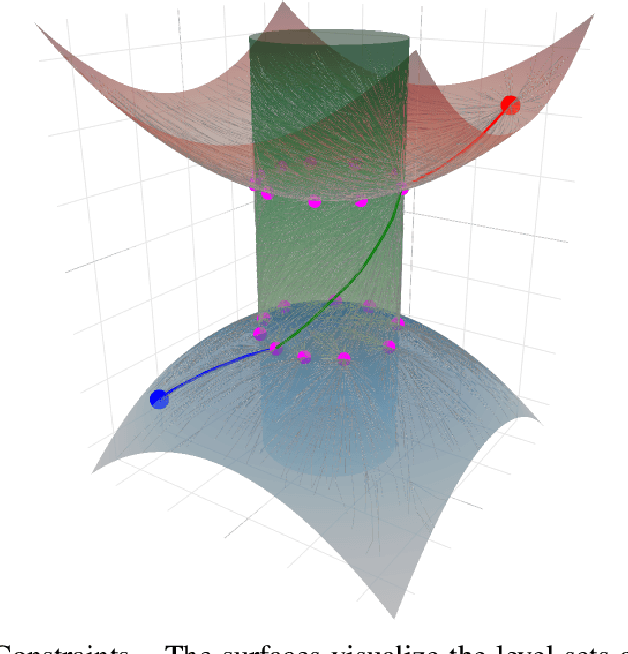
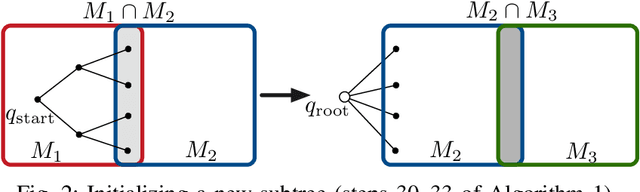
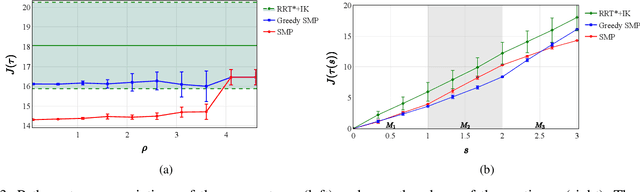
We address the problem of planning robot motions in constrained configuration spaces where the constraints change throughout the motion. A novel problem formulation is introduced that describes a task as a sequence of intersecting manifolds, which the robot needs to traverse in order to solve the task. We specify a class of sequential motion planning problems that fulfill a particular property of the change in the free configuration space when transitioning between manifolds. For this problem class, a sequential motion planning algorithm SMP is developed that searches for optimal intersection points between manifolds by using RRT* in an inner loop with a novel steering strategy. We provide a theoretical analysis regarding its probabilistic completeness and demonstrate its performance on kinematic planning problems where the constraints are represented as geometric primitives. Further, we show its capabilities on solving multi-robot object transportation tasks.
Resilience in multi-robot multi-target tracking with unknown number of targets through reconfiguration
Apr 15, 2020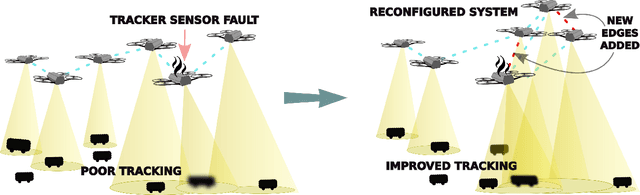
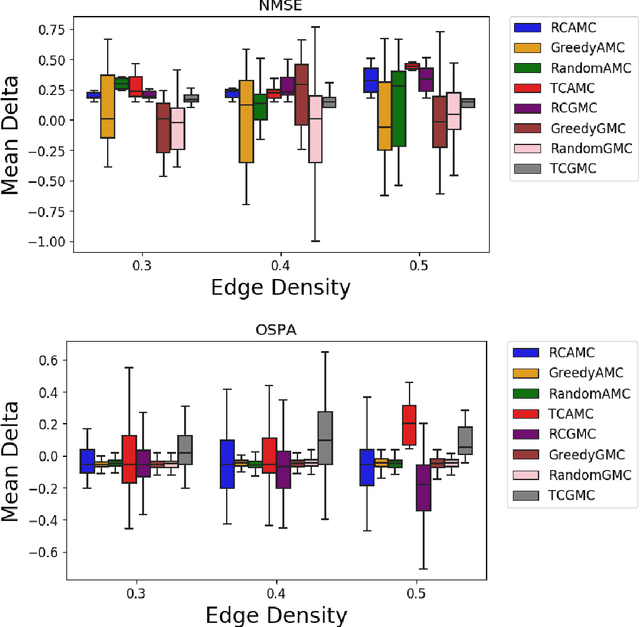
We address the problem of maintaining resource availability in a networked multi-robot team performing distributed tracking of unknown number of targets in an environment of interest. Based on our model, robots are equipped with sensing and computational resources enabling them to cooperatively track a set of targets in an environment using a distributed Probability Hypothesis Density (PHD) filter. We use the trace of a robot's sensor measurement noise covariance matrix to quantify its sensing quality. While executing the tracking task, if a robot experiences sensor quality degradation, then robot team's communication network is reconfigured such that the robot with the faulty sensor may share information with other robots to improve the team's target tracking ability without enforcing a large change in the number of active communication links. A central system which monitors the team executes all the network reconfiguration computations. We consider two different PHD fusion methods in this paper and propose four different Mixed Integer Semi-Definite Programming (MISDP) formulations (two formulations for each PHD fusion method) to accomplish our objective. All four MISDP formulations are validated in simulation.
Physics-based Simulation of Continuous-Wave LIDAR for Localization, Calibration and Tracking
Dec 03, 2019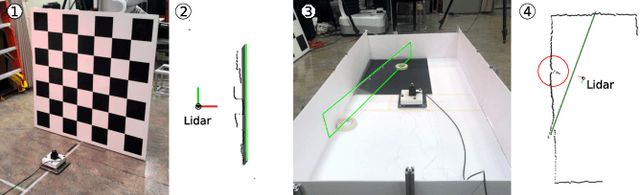
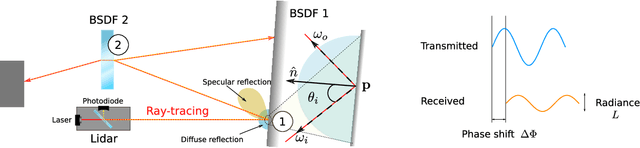
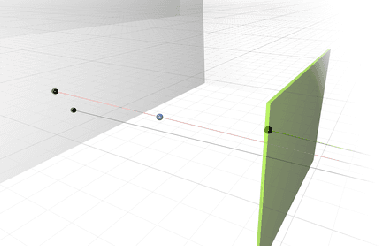

Light Detection and Ranging (LIDAR) sensors play an important role in the perception stack of autonomous robots, supplying mapping and localization pipelines with depth measurements of the environment. While their accuracy outperforms other types of depth sensors, such as stereo or time-of-flight cameras, the accurate modeling of LIDAR sensors requires laborious manual calibration that typically does not take into account the interaction of laser light with different surface types, incidence angles and other phenomena that significantly influence measurements. In this work, we introduce a physically plausible model of a 2D continuous-wave LIDAR that accounts for the surface-light interactions and simulates the measurement process in the Hokuyo URG-04LX LIDAR. Through automatic differentiation, we employ gradient-based optimization to estimate model parameters from real sensor measurements.
Resilient Coverage: Exploring the Local-to-Global Trade-off
Oct 03, 2019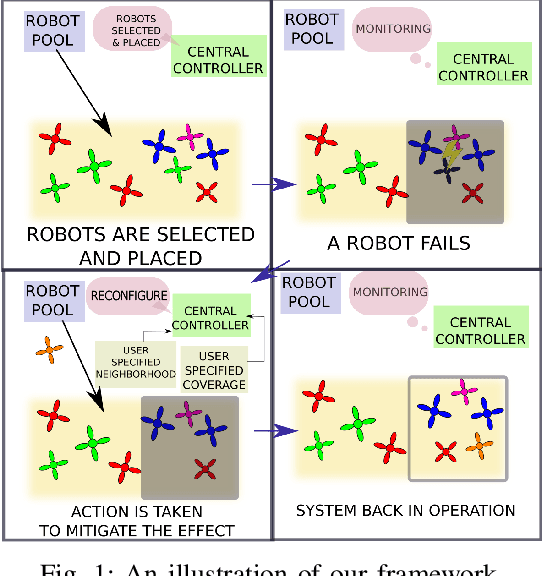
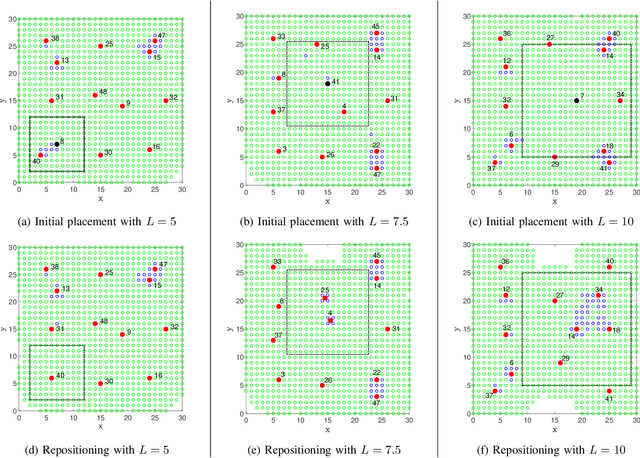
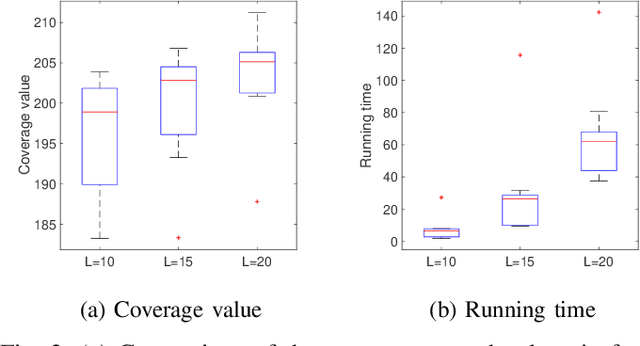
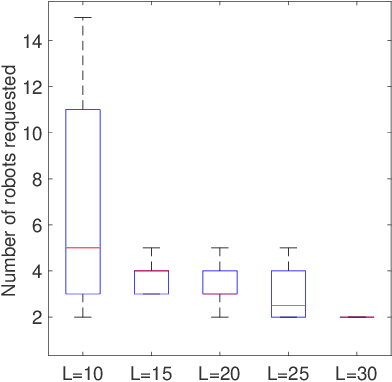
We propose a centralized control framework to select suitable robots from a heterogeneous pool and place them at appropriate locations to monitor a region for events of interest. In the event of a robot failure, the framework repositions robots in a user-defined local neighborhood of the failed robot to compensate for the coverage loss. The central controller augments the team with additional robots from the robot pool when simply repositioning robots fails to attain a user-specified level of desired coverage. The size of the local neighborhood around the failed robot and the desired coverage over the region are two settings that can be manipulated to achieve a user-specified balance. We investigate the trade-off between the coverage compensation achieved through local repositioning and the computation required to plan the new robot locations. We also study the relationship between the size of the local neighborhood and the number of additional robots added to the team for a given user-specified level of desired coverage. The computational complexity of our resilient strategy (tunable resilient coordination), is quadratic in both neighborhood size and number of robots in the team. At first glance, it seems that any desired level of coverage can be efficiently achieved by augmenting the robot team with more robots while keeping the neighborhood size fixed. However, we show that to reach a high level of coverage in a neighborhood with a large robot population, it is more efficient to enlarge the neighborhood size, instead of adding additional robots and repositioning them.
Resilience in multi-robot target tracking through reconfiguration
Oct 03, 2019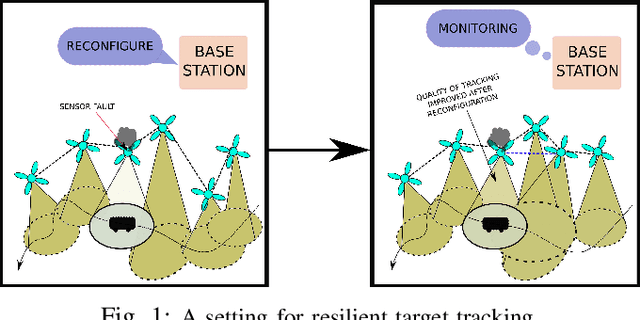
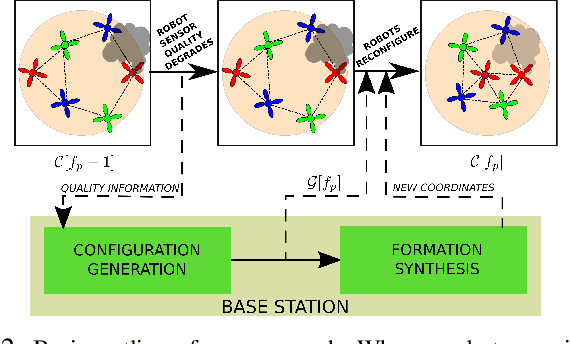
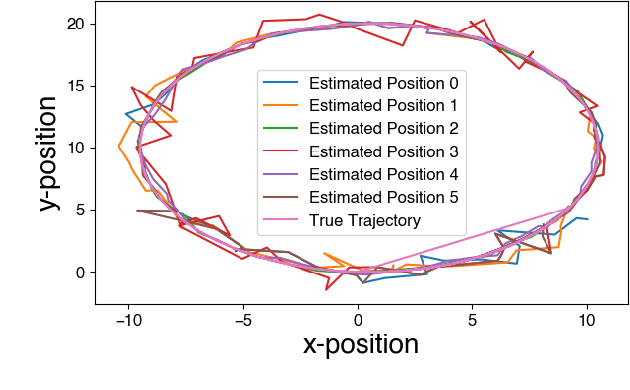
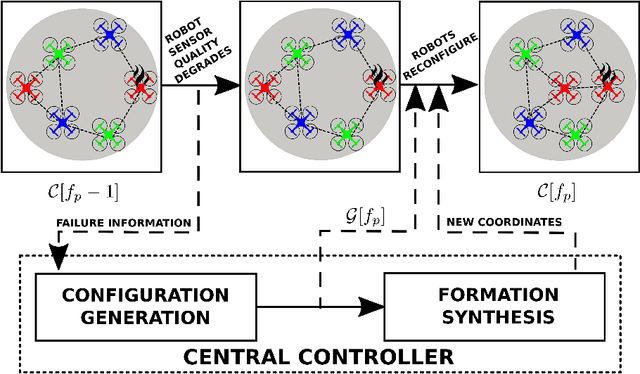
We address the problem of maintaining resource availability in a networked multi-robot system performing distributed target tracking. In our model, robots are equipped with sensing and computational resources enabling them to track a target's position using a Distributed Kalman Filter (DKF). We use the trace of each robot's sensor measurement noise covariance matrix as a measure of sensing quality. When a robot's sensing quality deteriorates, the system's communication graph is modified by adding edges such that the robot with deteriorating sensor quality may share information with other robots to improve the team's target tracking ability. This computation is performed centrally and is designed to work without a large change in the number of active communication links. We propose two mixed integer semi-definite programming formulations (an 'agent-centric' strategy and a 'team-centric' strategy) to achieve this goal. We implement both formulations and a greedy strategy in simulation and show that the team-centric strategy outperforms the agent-centric and greedy strategies.
Information correlated Lévy walk exploration and distributed mapping using a swarm of robots
Mar 17, 2019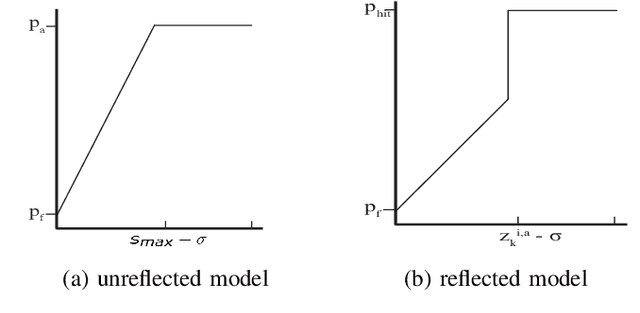
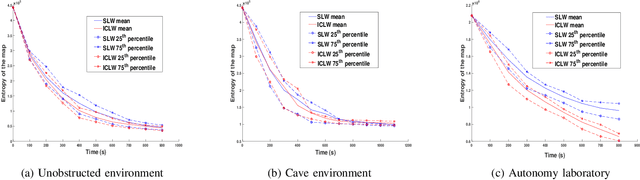
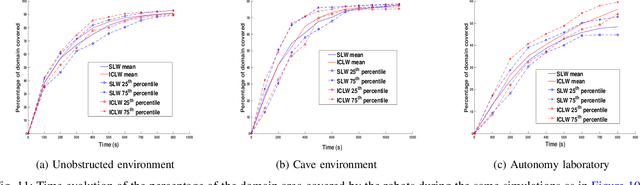
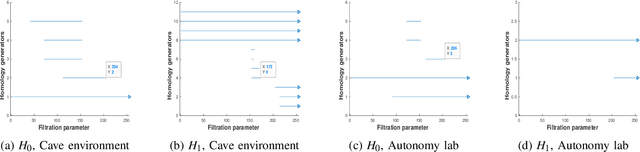
In this work, we present a novel distributed method for constructing an occupancy grid map of an unknown environment using a swarm of robots with global localization capabilities and limited inter-robot communication. The robots explore the domain by performing L\'evy walks in which their headings are defined by maximizing the mutual information between the robot's estimate of its environment in the form of an occupancy grid map and the distance measurements that it is likely to obtain when it moves in that direction. Each robot is equipped with laser range sensors, and it builds its occupancy grid map by repeatedly combining its own distance measurements with map information that is broadcast by neighboring robots. Using results on average consensus over time-varying graph topologies, we prove that all robots' maps will eventually converge to the actual map of the environment. In addition, we demonstrate that a technique based on topological data analysis, developed in our previous work for generating topological maps, can be readily extended for adaptive thresholding of occupancy grid maps. We validate the effectiveness of our distributed exploration and mapping strategy through a series of 2D simulations and multi-robot experiments.