 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Local Control to Large-Scale Topological Navigation
Oct 08, 2019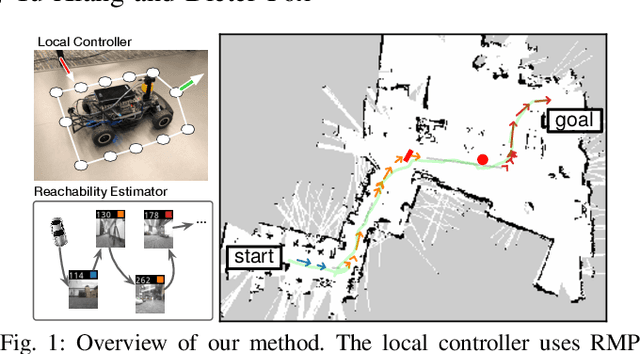
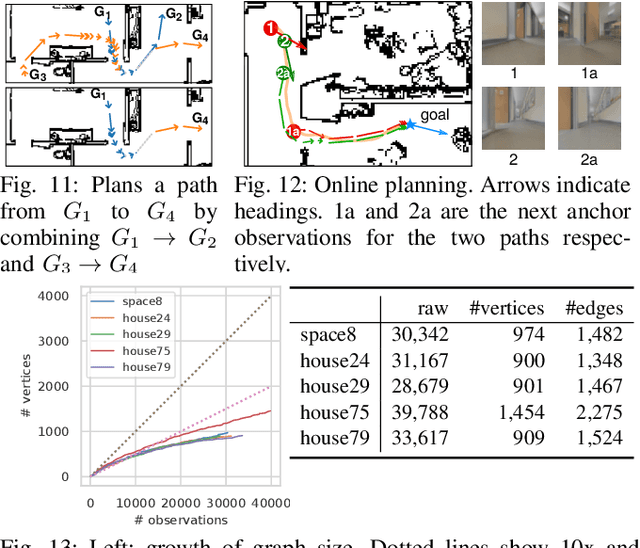

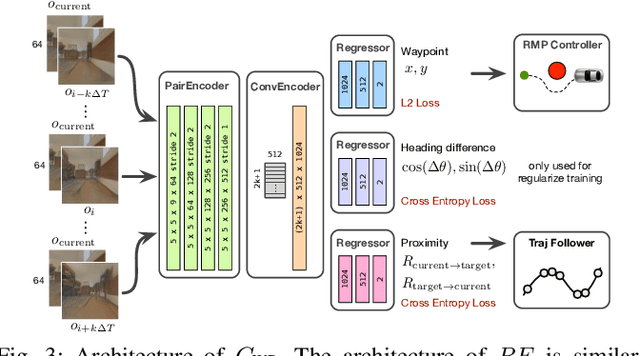
Visual topological navigation has been revitalized recently thanks to the advancement of deep learning that substantially improves robot perception. However, the scalability and reliability issue remain challenging due to the complexity and ambiguity of real world images and mechanical constraints of real robots. We present an intuitive solution to show that by accurately measuring the capability of a local controller, large-scale visual topological navigation can be achieved while being scalable and robust. Our approach achieves state-of-the-art results in trajectory following and planning in large-scale environments. It also generalizes well to real robots and new environments without retraining or finetuning.
Self-supervised 6D Object Pose Estimation for Robot Manipulation
Sep 23, 2019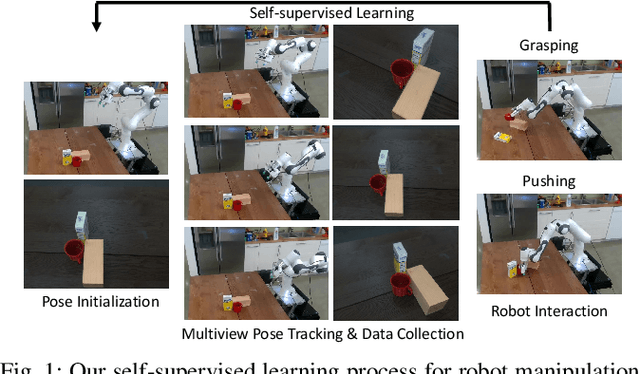
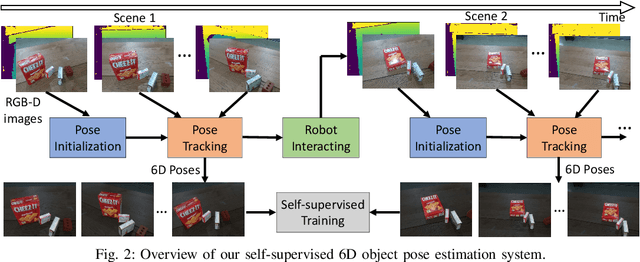
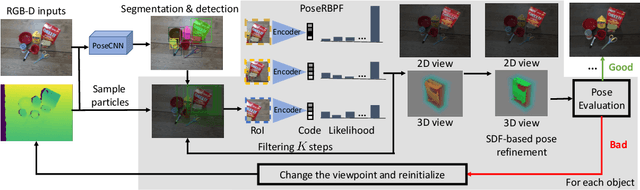
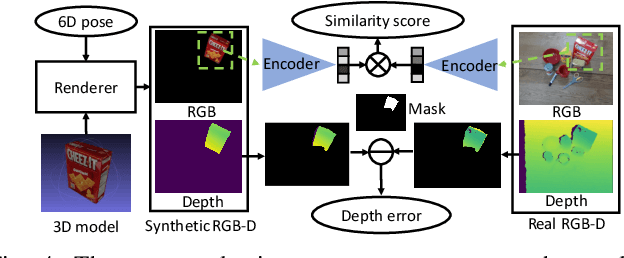
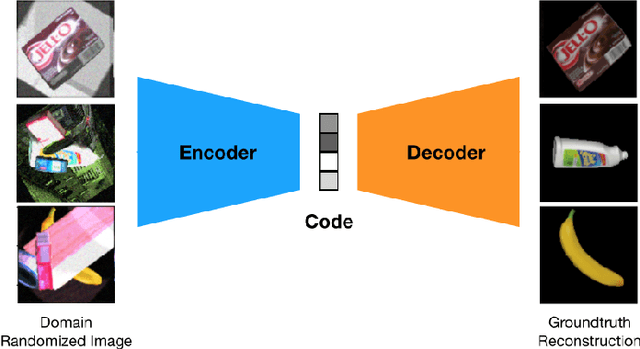
To teach robots skills, it is crucial to obtain data with supervision. Since annotating real world data is time-consuming and expensive, enabling robots to learn in a self-supervised way is important. In this work, we introduce a robot system for self-supervised 6D object pose estimation. Starting from modules trained in simulation, our system is able to label real world images with accurate 6D object poses for self-supervised learning. In addition, the robot interacts with objects in the environment to change the object configuration by grasping or pushing objects. In this way, our system is able to continuously collect data and improve its pose estimation modules. We show that the self-supervised learning improves object segmentation and 6D pose estimation performance, and consequently enables the system to grasp objects more reliably. A video showing the experiments can be found at https://youtu.be/W1Y0Mmh1Gd8.
Representing Robot Task Plans as Robust Logical-Dynamical Systems
Aug 05, 2019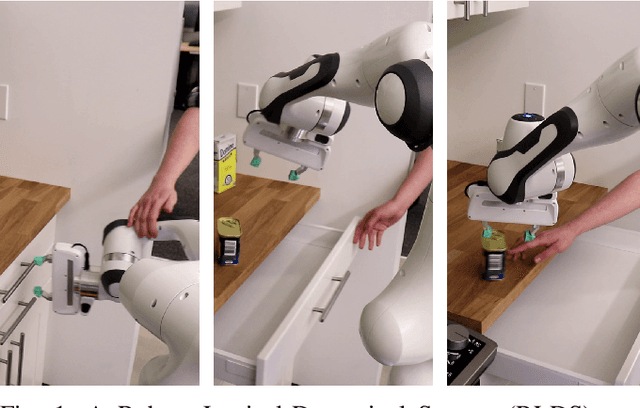
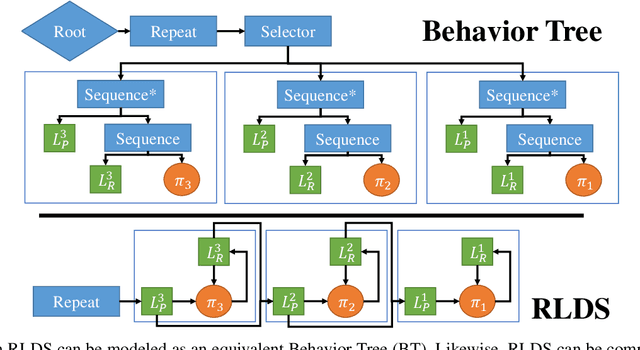
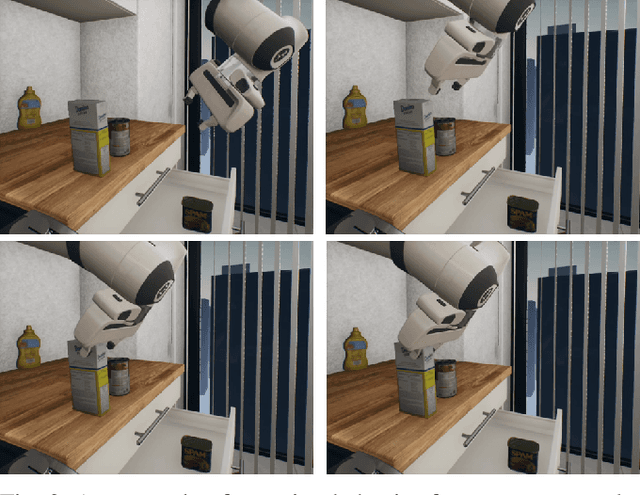
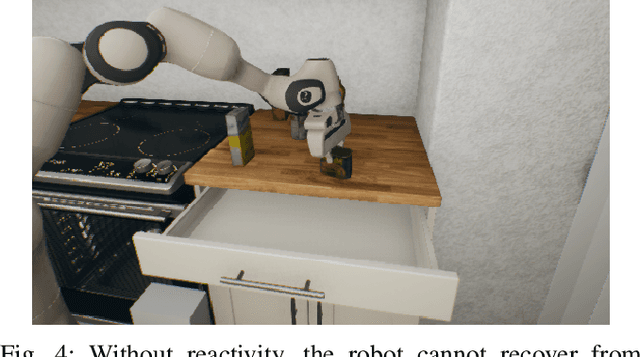
It is difficult to create robust, reusable, and reactive behaviors for robots that can be easily extended and combined. Frameworks such as Behavior Trees are flexible but difficult to characterize, especially when designing reactions and recovery behaviors to consistently converge to a desired goal condition. We propose a framework which we call Robust Logical-Dynamical Systems (RLDS), which combines the advantages of task representations like behavior trees with theoretical guarantees on performance. RLDS can also be constructed automatically from simple sequential task plans and will still achieve robust, reactive behavior in dynamic real-world environments. In this work, we describe both our proposed framework and a case study on a simple household manipulation task, with examples for how specific pieces can be implemented to achieve robust behavior. Finally, we show how in the context of these manipulation tasks, a combination of an RLDS with planning can achieve better results under adversarial conditions.
Part Segmentation for Highly Accurate Deformable Tracking in Occlusions via Fully Convolutional Neural Networks
Aug 05, 2019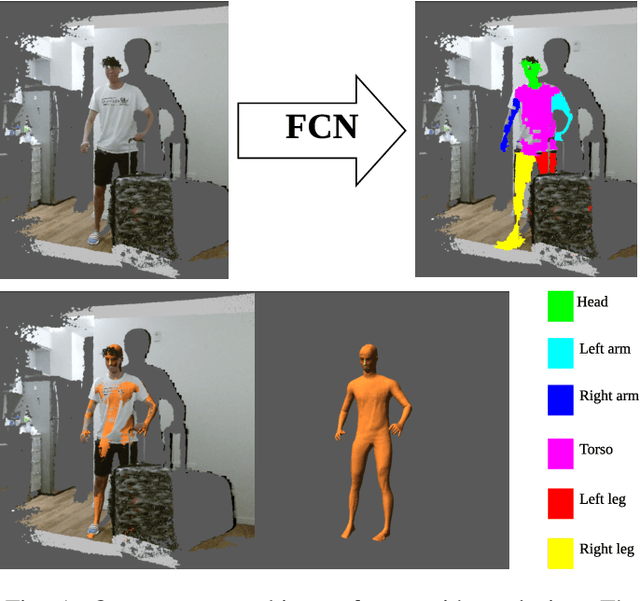
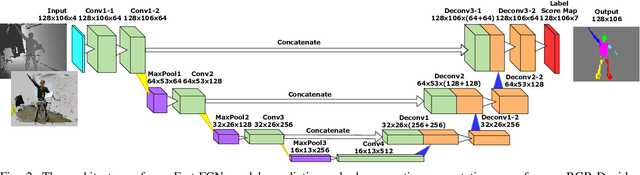
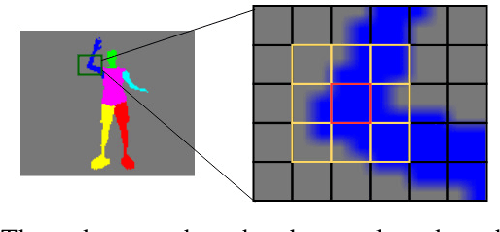
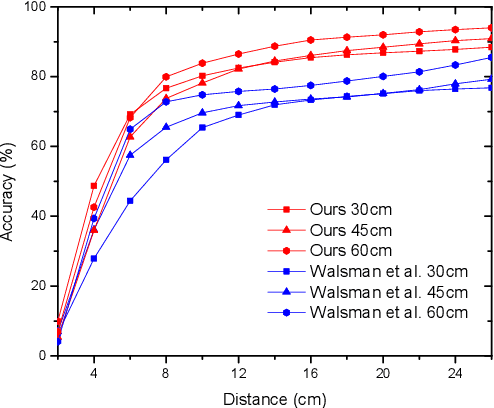
Successfully tracking the human body is an important perceptual challenge for robots that must work around people. Existing methods fall into two broad categories: geometric tracking and direct pose estimation using machine learning. While recent work has shown direct estimation techniques can be quite powerful, geometric tracking methods using point clouds can provide a very high level of 3D accuracy which is necessary for many robotic applications. However these approaches can have difficulty in clutter when large portions of the subject are occluded. To overcome this limitation, we propose a solution based on fully convolutional neural networks (FCN). We develop an optimized Fast-FCN network architecture for our application which allows us to filter observed point clouds and improve tracking accuracy while maintaining interactive frame rates. We also show that this model can be trained with a limited number of examples and almost no manual labelling by using an existing geometric tracker and data augmentation to automatically generate segmentation maps. We demonstrate the accuracy of our full system by comparing it against an existing geometric tracker, and show significant improvement in these challenging scenarios.
The Best of Both Modes: Separately Leveraging RGB and Depth for Unseen Object Instance Segmentation
Jul 30, 2019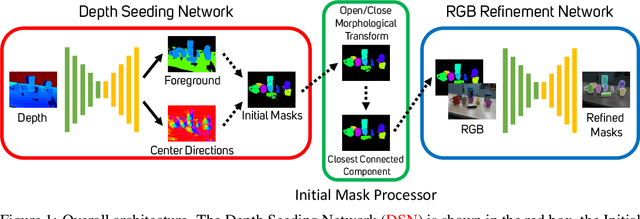
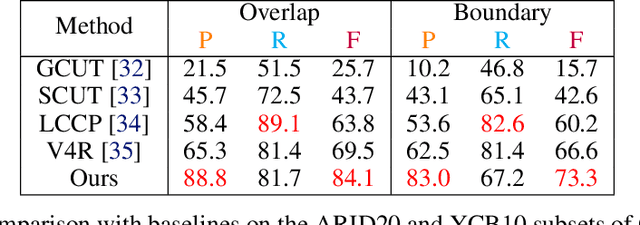
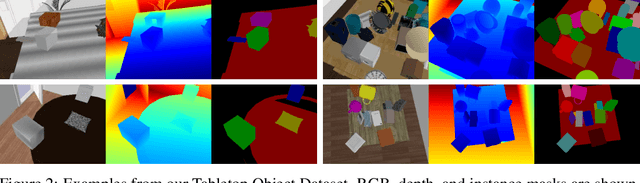
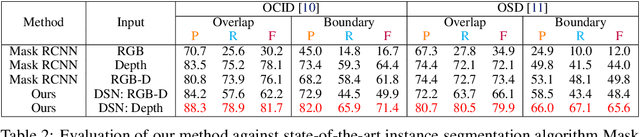
In order to function in unstructured environments, robots need the ability to recognize unseen novel objects. We take a step in this direction by tackling the problem of segmenting unseen object instances in tabletop environments. However, the type of large-scale real-world dataset required for this task typically does not exist for most robotic settings, which motivates the use of synthetic data. We propose a novel method that separately leverages synthetic RGB and synthetic depth for unseen object instance segmentation. Our method is comprised of two stages where the first stage operates only on depth to produce rough initial masks, and the second stage refines these masks with RGB. Surprisingly, our framework is able to learn from synthetic RGB-D data where the RGB is non-photorealistic. To train our method, we introduce a large-scale synthetic dataset of random objects on tabletops. We show that our method, trained on this dataset, can produce sharp and accurate masks, outperforming state-of-the-art methods on unseen object instance segmentation. We also show that our method can segment unseen objects for robot grasping. Code, models and video can be found at https://rse-lab.cs.washington.edu/projects/unseen-object-instance-segmentation/.
BayesSim: adaptive domain randomization via probabilistic inference for robotics simulators
Jun 04, 2019
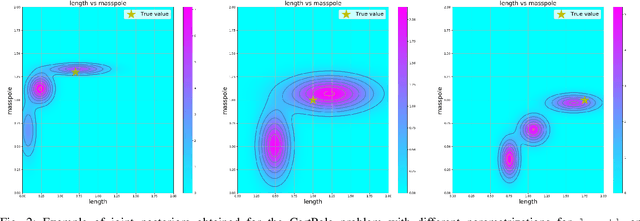
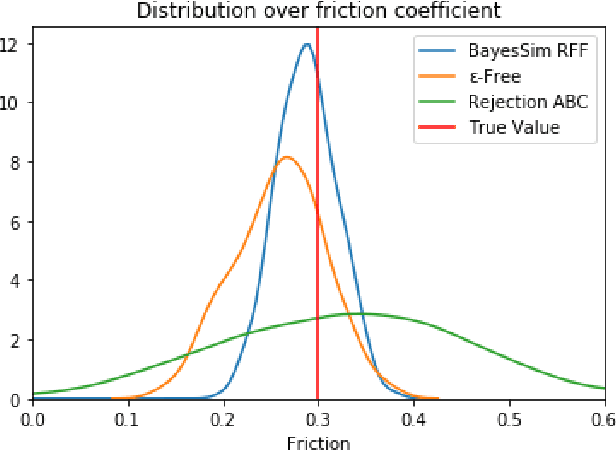
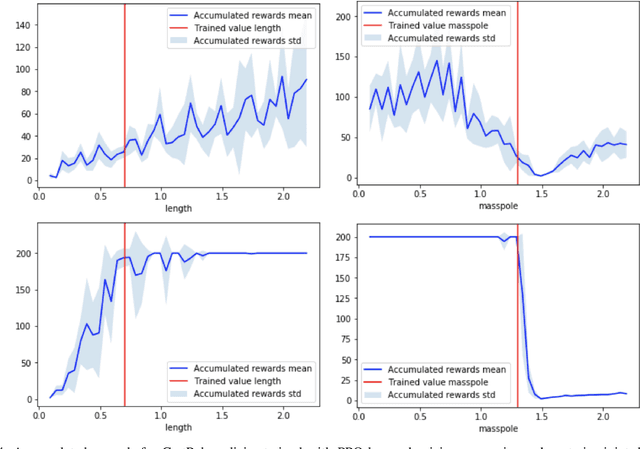
We introduce BayesSim, a framework for robotics simulations allowing a full Bayesian treatment for the parameters of the simulator. As simulators become more sophisticated and able to represent the dynamics more accurately, fundamental problems in robotics such as motion planning and perception can be solved in simulation and solutions transferred to the physical robot. However, even the most complex simulator might still not be able to represent reality in all its details either due to inaccurate parametrization or simplistic assumptions in the dynamic models. BayesSim provides a principled framework to reason about the uncertainty of simulation parameters. Given a black box simulator (or generative model) that outputs trajectories of state and action pairs from unknown simulation parameters, followed by trajectories obtained with a physical robot, we develop a likelihood-free inference method that computes the posterior distribution of simulation parameters. This posterior can then be used in problems where Sim2Real is critical, for example in policy search. We compare the performance of BayesSim in obtaining accurate posteriors in a number of classical control and robotics problems. Results show that the posterior computed from BayesSim can be used for domain randomization outperforming alternative methods that randomize based on uniform priors.
* Code available at https://github.com/rafaelpossas/bayes_sim
6-DOF GraspNet: Variational Grasp Generation for Object Manipulation
May 25, 2019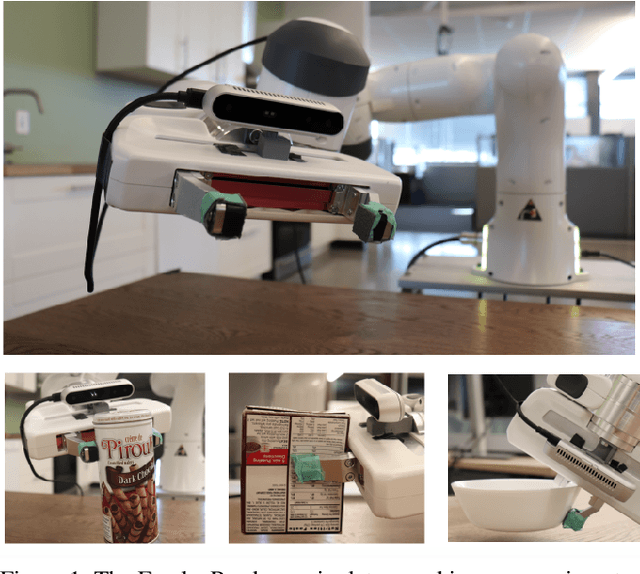
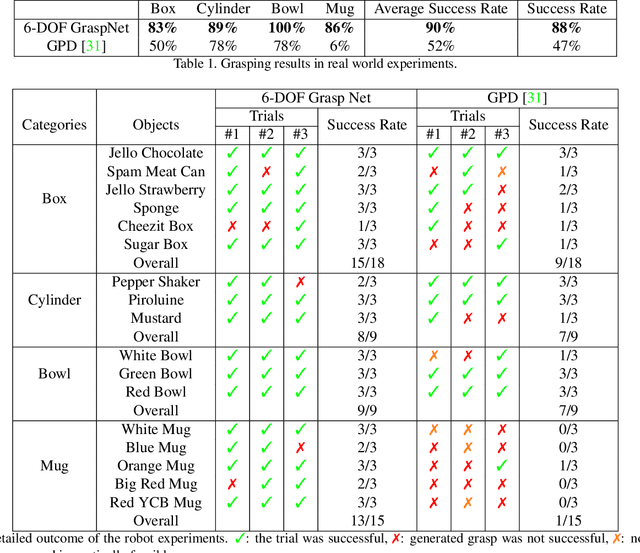
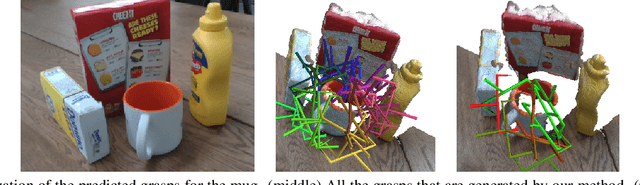
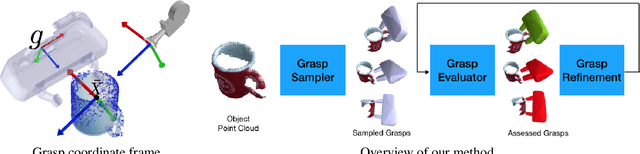
Generating grasp poses is a crucial component for any robot object manipulation task. In this work, we formulate the problem of grasp generation as sampling a set of grasps using a variational auto-encoder and assess and refine the sampled grasps using a grasp evaluator model. Both Grasp Sampler and Grasp Refinement networks take 3D point clouds observed by a depth camera as input. We evaluate our approach in simulation and real-world robot experiments. Our approach achieves 88\% success rate on various commonly used objects with diverse appearances, scales, and weights. Our model is trained purely in simulation and works in the real world without any extra steps. The video of our experiments can be found at: https://youtu.be/KNnDpGEE_NE
PoseRBPF: A Rao-Blackwellized Particle Filter for 6D Object Pose Tracking
May 22, 2019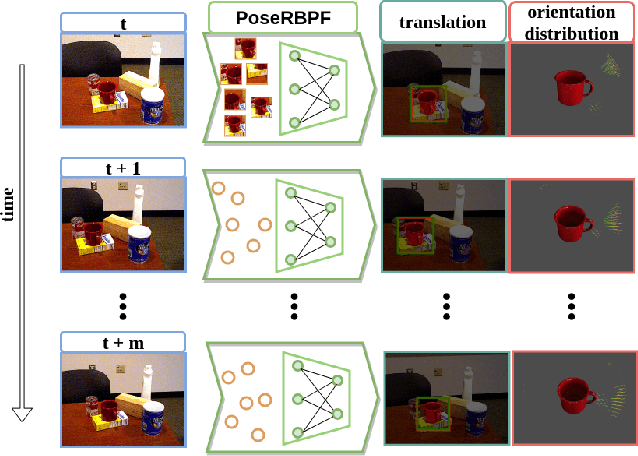
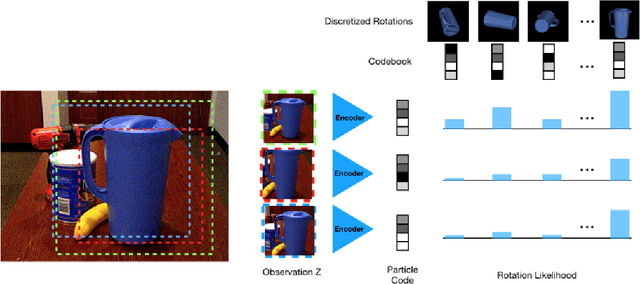
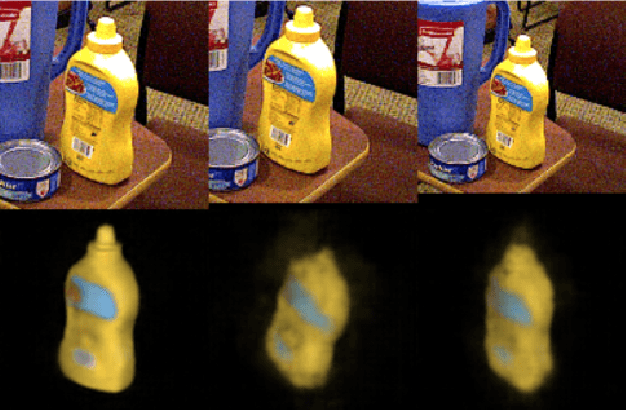
Tracking 6D poses of objects from videos provides rich information to a robot in performing different tasks such as manipulation and navigation. In this work, we formulate the 6D object pose tracking problem in the Rao-Blackwellized particle filtering framework, where the 3D rotation and the 3D translation of an object are decoupled. This factorization allows our approach, called PoseRBPF, to efficiently estimate the 3D translation of an object along with the full distribution over the 3D rotation. This is achieved by discretizing the rotation space in a fine-grained manner, and training an auto-encoder network to construct a codebook of feature embeddings for the discretized rotations. As a result, PoseRBPF can track objects with arbitrary symmetries while still maintaining adequate posterior distributions. Our approach achieves state-of-the-art results on two 6D pose estimation benchmarks. A video showing the experiments can be found at https://youtu.be/lE5gjzRKWuA
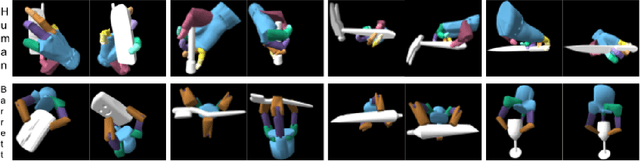
Learning Latent Space Dynamics for Tactile Servoing
Apr 15, 2019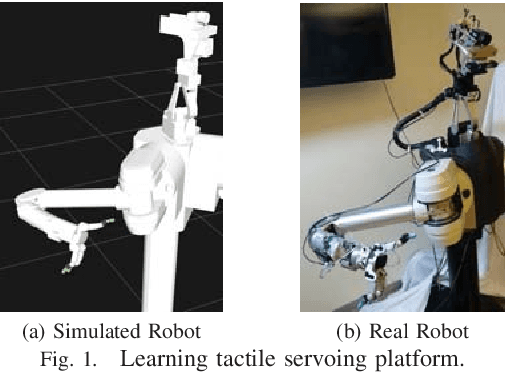
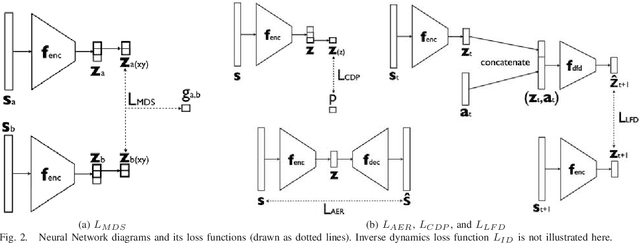
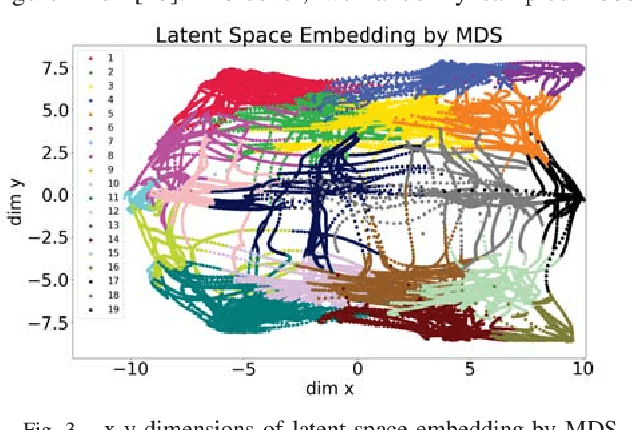
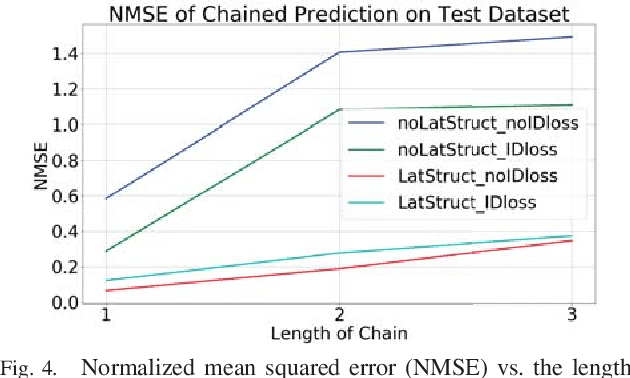
To achieve a dexterous robotic manipulation, we need to endow our robot with tactile feedback capability, i.e. the ability to drive action based on tactile sensing. In this paper, we specifically address the challenge of tactile servoing, i.e. given the current tactile sensing and a target/goal tactile sensing --memorized from a successful task execution in the past-- what is the action that will bring the current tactile sensing to move closer towards the target tactile sensing at the next time step. We develop a data-driven approach to acquire a dynamics model for tactile servoing by learning from demonstration. Moreover, our method represents the tactile sensing information as to lie on a surface --or a 2D manifold-- and perform a manifold learning, making it applicable to any tactile skin geometry. We evaluate our method on a contact point tracking task using a robot equipped with a tactile finger. A video demonstrating our approach can be seen in https://youtu.be/0QK0-Vx7WkI
ContactGrasp: Functional Multi-finger Grasp Synthesis from Contact
Apr 09, 2019
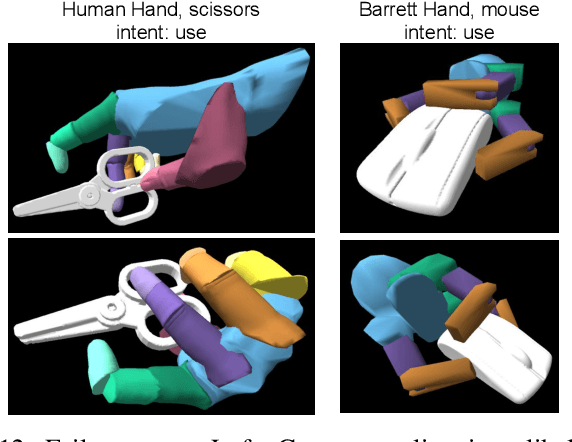
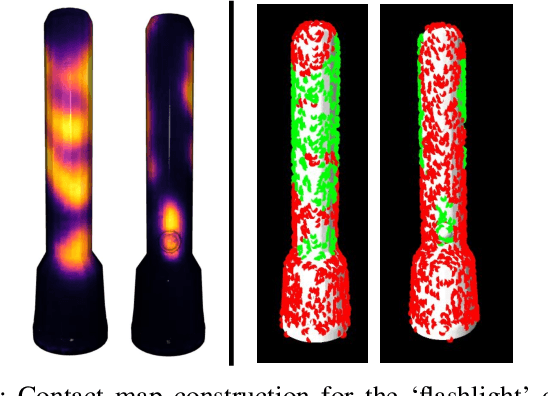
Grasping and manipulating objects is an important human skill. Since most objects are designed to be manipulated by human hands, anthropomorphic hands can enable richer human-robot interaction. Desirable grasps are not only stable, but also functional: they enable post-grasp actions with the object. However, functional grasp synthesis for high-dof anthropomorphic hands from object shape alone is challenging. We present ContactGrasp, a framework that allows functional grasp synthesis from object shape and contact on the object surface. Contact can be manually specified or obtained through demonstrations. Our contact representation is object-centric and allows functional grasp synthesis even for hand models different than the one used for demonstration. Using a dataset of contact demonstrations from humans grasping diverse household objects, we synthesize functional grasps for three hand models and two functional intents. The project webpage is https://contactdb.cc.gatech.edu/contactgrasp.html.