 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZEST: Zero-shot Embodied Skill Transfer for Athletic Robot Control
Jan 30, 2026Achieving robust, human-like whole-body control on humanoid robots for agile, contact-rich behaviors remains a central challenge, demanding heavy per-skill engineering and a brittle process of tuning controllers. We introduce ZEST (Zero-shot Embodied Skill Transfer), a streamlined motion-imitation framework that trains policies via reinforcement learning from diverse sources -- high-fidelity motion capture, noisy monocular video, and non-physics-constrained animation -- and deploys them to hardware zero-shot. ZEST generalizes across behaviors and platforms while avoiding contact labels, reference or observation windows, state estimators, and extensive reward shaping. Its training pipeline combines adaptive sampling, which focuses training on difficult motion segments, and an automatic curriculum using a model-based assistive wrench, together enabling dynamic, long-horizon maneuvers. We further provide a procedure for selecting joint-level gains from approximate analytical armature values for closed-chain actuators, along with a refined model of actuators. Trained entirely in simulation with moderate domain randomization, ZEST demonstrates remarkable generality. On Boston Dynamics' Atlas humanoid, ZEST learns dynamic, multi-contact skills (e.g., army crawl, breakdancing) from motion capture. It transfers expressive dance and scene-interaction skills, such as box-climbing, directly from videos to Atlas and the Unitree G1. Furthermore, it extends across morphologies to the Spot quadruped, enabling acrobatics, such as a continuous backflip, through animation. Together, these results demonstrate robust zero-shot deployment across heterogeneous data sources and embodiments, establishing ZEST as a scalable interface between biological movements and their robotic counterparts.
V-STRONG: Visual Self-Supervised Traversability Learning for Off-road Navigation
Dec 26, 2023



Reliable estimation of terrain traversability is critical for the successful deployment of autonomous systems in wild, outdoor environments. Given the lack of large-scale annotated datasets for off-road navigation, strictly-supervised learning approaches remain limited in their generalization ability. To this end, we introduce a novel, image-based self-supervised learning method for traversability prediction, leveraging a state-of-the-art vision foundation model for improved out-of-distribution performance. Our method employs contrastive representation learning using both human driving data and instance-based segmentation masks during training. We show that this simple, yet effective, technique drastically outperforms recent methods in predicting traversability for both on- and off-trail driving scenarios. We compare our method with recent baselines on both a common benchmark as well as our own datasets, covering a diverse range of outdoor environments and varied terrain types. We also demonstrate the compatibility of resulting costmap predictions with a model-predictive controller. Finally, we evaluate our approach on zero- and few-shot tasks, demonstrating unprecedented performance for generalization to new environments. Videos and additional material can be found here: \url{https://sites.google.com/view/visual-traversability-learning}.
HOUND: An Open-Source, Low-cost Research Platform for High-speed Off-road Underactuated Nonholonomic Driving
Nov 19, 2023



Off-road vehicles are susceptible to rollovers in terrains with large elevation features, such as steep hills, ditches, and berms. One way to protect them against rollovers is ruggedization through the use of industrial-grade parts and physical modifications. However, this solution can be prohibitively expensive for academic research labs. Our key insight is that a software-based rollover-prevention system (RPS) enables the use of commercial-off-the-shelf hardware parts that are cheaper than their industrial counterparts, thus reducing overall cost. In this paper, we present HOUND, a small-scale, inexpensive, off-road autonomy platform that can handle challenging outdoor terrains at high speeds through the integration of an RPS. HOUND is integrated with a complete stack for perception and control, geared towards aggressive offroad driving. We deploy HOUND in the real world, at high speeds, on four different terrains covering 50 km of driving and highlight its utility in preventing rollovers and traversing difficult terrain. Additionally, through integration with BeamNG, a state-of-the-art driving simulator, we demonstrate a significant reduction in rollovers without compromising turning ability across a series of simulated experiments. Supplementary material can be found on our website, where we will also release all design documents for the platform: https://sites.google.com/view/prl-hound .
TerrainNet: Visual Modeling of Complex Terrain for High-speed, Off-road Navigation
Mar 28, 2023



Effective use of camera-based vision systems is essential for robust performance in autonomous off-road driving, particularly in the high-speed regime. Despite success in structured, on-road settings, current end-to-end approaches for scene prediction have yet to be successfully adapted for complex outdoor terrain. To this end, we present TerrainNet, a vision-based terrain perception system for semantic and geometric terrain prediction for aggressive, off-road navigation. The approach relies on several key insights and practical considerations for achieving reliable terrain modeling. The network includes a multi-headed output representation to capture fine- and coarse-grained terrain features necessary for estimating traversability. Accurate depth estimation is achieved using self-supervised depth completion with multi-view RGB and stereo inputs. Requirements for real-time performance and fast inference speeds are met using efficient, learned image feature projections. Furthermore, the model is trained on a large-scale, real-world off-road dataset collected across a variety of diverse outdoor environments. We show how TerrainNet can also be used for costmap prediction and provide a detailed framework for integration into a planning module. We demonstrate the performance of TerrainNet through extensive comparison to current state-of-the-art baselines for camera-only scene prediction. Finally, we showcase the effectiveness of integrating TerrainNet within a complete autonomous-driving stack by conducting a real-world vehicle test in a challenging off-road scenario.
Learning Implicit Priors for Motion Optimization
Apr 11, 2022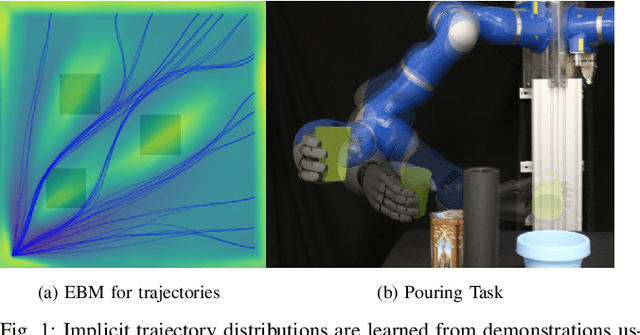
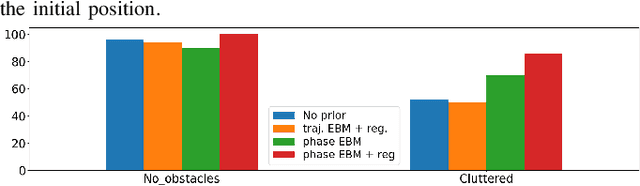
In this paper, we focus on the problem of integrating Energy-based Models (EBM) as guiding priors for motion optimization. EBMs are a set of neural networks that can represent expressive probability density distributions in terms of a Gibbs distribution parameterized by a suitable energy function. Due to their implicit nature, they can easily be integrated as optimization factors or as initial sampling distributions in the motion optimization problem, making them good candidates to integrate data-driven priors in the motion optimization problem. In this work, we present a set of required modeling and algorithmic choices to adapt EBMs into motion optimization. We investigate the benefit of including additional regularizers in the learning of the EBMs to use them with gradient-based optimizers and we present a set of EBM architectures to learn generalizable distributions for manipulation tasks. We present multiple cases in which the EBM could be integrated for motion optimization and evaluate the performance of learned EBMs as guiding priors for both simulated and real robot experiments.
Stein Variational Probabilistic Roadmaps
Nov 04, 2021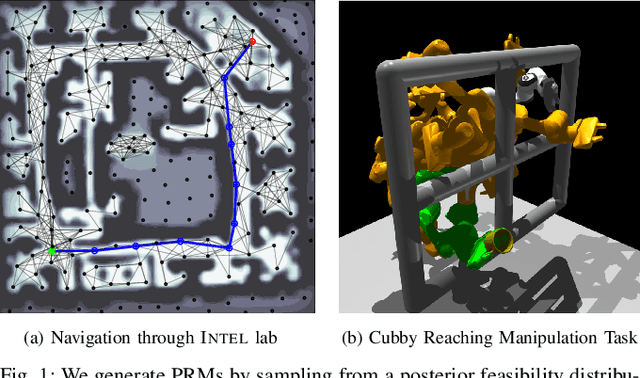
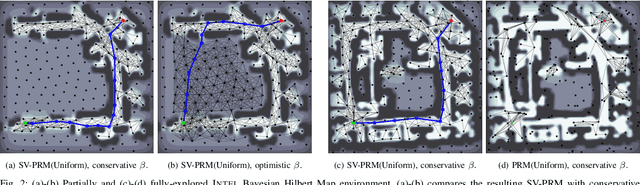
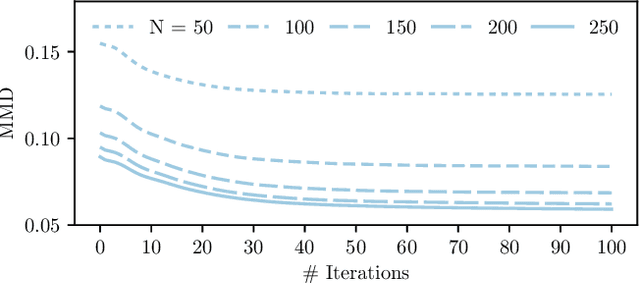
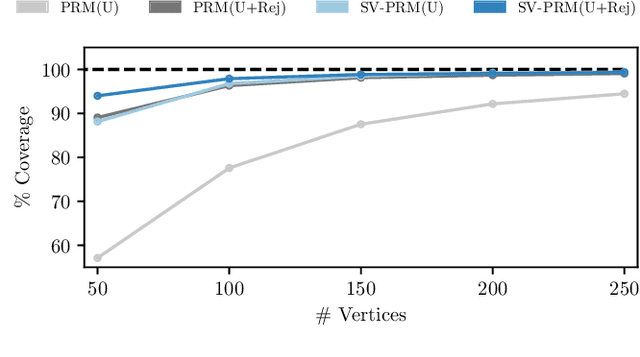
Efficient and reliable generation of global path plans are necessary for safe execution and deployment of autonomous systems. In order to generate planning graphs which adequately resolve the topology of a given environment, many sampling-based motion planners resort to coarse, heuristically-driven strategies which often fail to generalize to new and varied surroundings. Further, many of these approaches are not designed to contend with partial-observability. We posit that such uncertainty in environment geometry can, in fact, help \textit{drive} the sampling process in generating feasible, and probabilistically-safe planning graphs. We propose a method for Probabilistic Roadmaps which relies on particle-based Variational Inference to efficiently cover the posterior distribution over feasible regions in configuration space. Our approach, Stein Variational Probabilistic Roadmap (SV-PRM), results in sample-efficient generation of planning-graphs and large improvements over traditional sampling approaches. We demonstrate the approach on a variety of challenging planning problems, including real-world probabilistic occupancy maps and high-dof manipulation problems common in robotics.
Entropy Regularized Motion Planning via Stein Variational Inference
Jul 11, 2021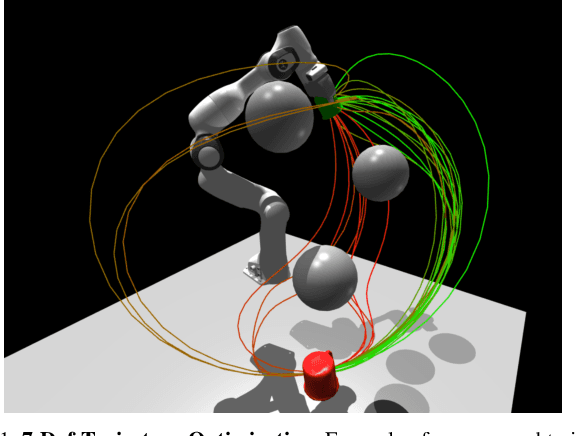
Many Imitation and Reinforcement Learning approaches rely on the availability of expert-generated demonstrations for learning policies or value functions from data. Obtaining a reliable distribution of trajectories from motion planners is non-trivial, since it must broadly cover the space of states likely to be encountered during execution while also satisfying task-based constraints. We propose a sampling strategy based on variational inference to generate distributions of feasible, low-cost trajectories for high-dof motion planning tasks. This includes a distributed, particle-based motion planning algorithm which leverages a structured graphical representations for inference over multi-modal posterior distributions. We also make explicit connections to both approximate inference for trajectory optimization and entropy-regularized reinforcement learning.
Dual Online Stein Variational Inference for Control and Dynamics
Mar 23, 2021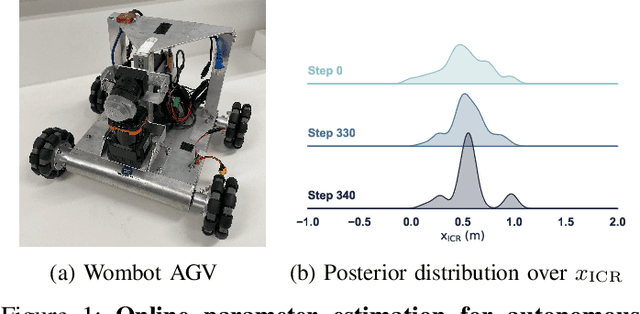
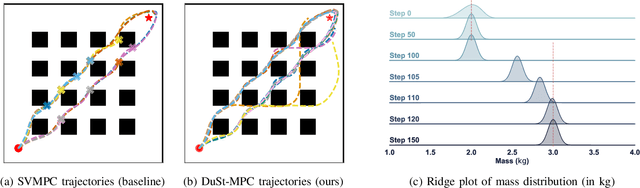
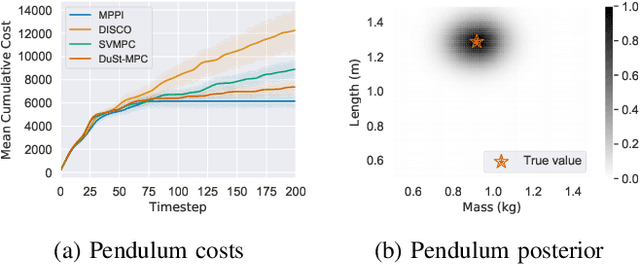
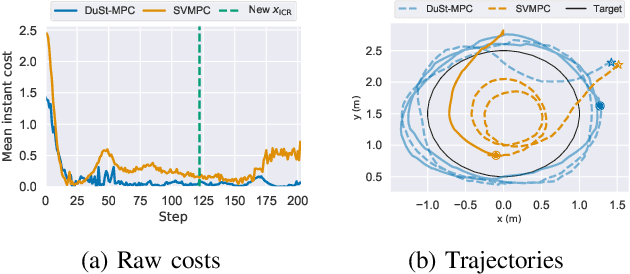
Model predictive control (MPC) schemes have a proven track record for delivering aggressive and robust performance in many challenging control tasks, coping with nonlinear system dynamics, constraints, and observational noise. Despite their success, these methods often rely on simple control distributions, which can limit their performance in highly uncertain and complex environments. MPC frameworks must be able to accommodate changing distributions over system parameters, based on the most recent measurements. In this paper, we devise an implicit variational inference algorithm able to estimate distributions over model parameters and control inputs on-the-fly. The method incorporates Stein Variational gradient descent to approximate the target distributions as a collection of particles, and performs updates based on a Bayesian formulation. This enables the approximation of complex multi-modal posterior distributions, typically occurring in challenging and realistic robot navigation tasks. We demonstrate our approach on both simulated and real-world experiments requiring real-time execution in the face of dynamically changing environments.
Stein Variational Model Predictive Control
Dec 09, 2020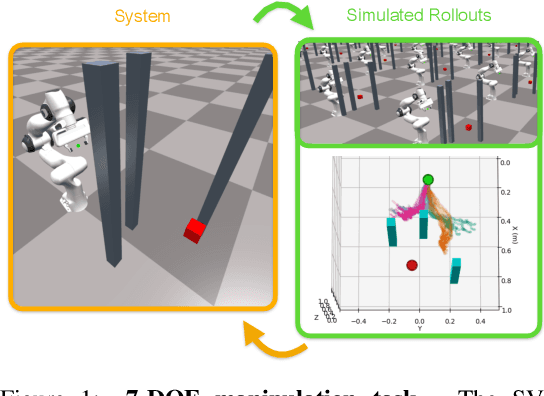
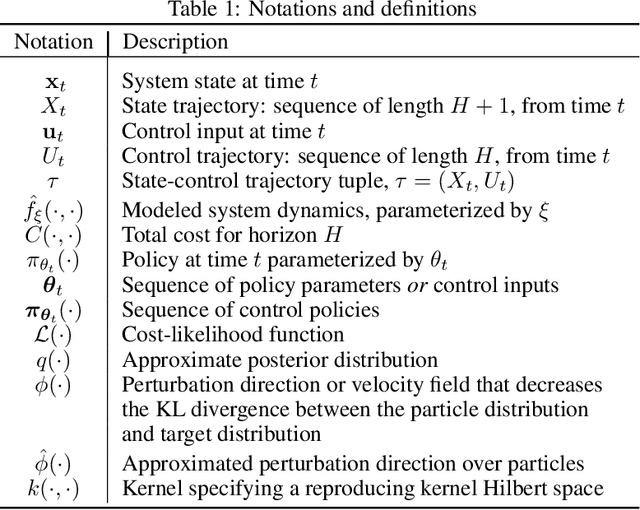
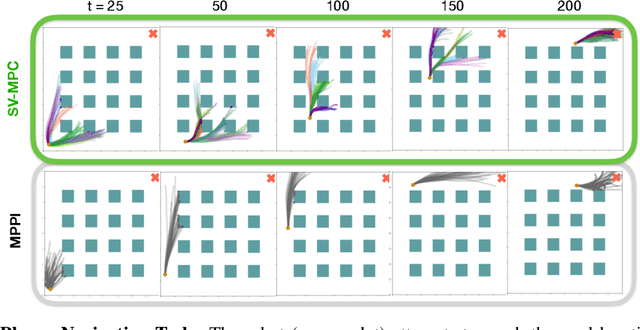
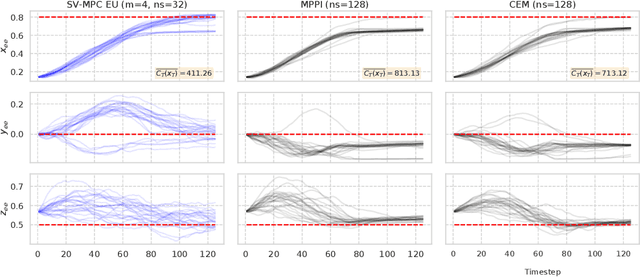
Decision making under uncertainty is critical to real-world, autonomous systems. Model Predictive Control (MPC) methods have demonstrated favorable performance in practice, but remain limited when dealing with complex probability distributions. In this paper, we propose a generalization of MPC that represents a multitude of solutions as posterior distributions. By casting MPC as a Bayesian inference problem, we employ variational methods for posterior computation, naturally encoding the complexity and multi-modality of the decision making problem. We propose a Stein variational gradient descent method to estimate the posterior directly over control parameters, given a cost function and observed state trajectories. We show that this framework leads to successful planning in challenging, non-convex optimal control problems.
Joint Inference of Kinematic and Force Trajectories with Visuo-Tactile Sensing
Mar 08, 2019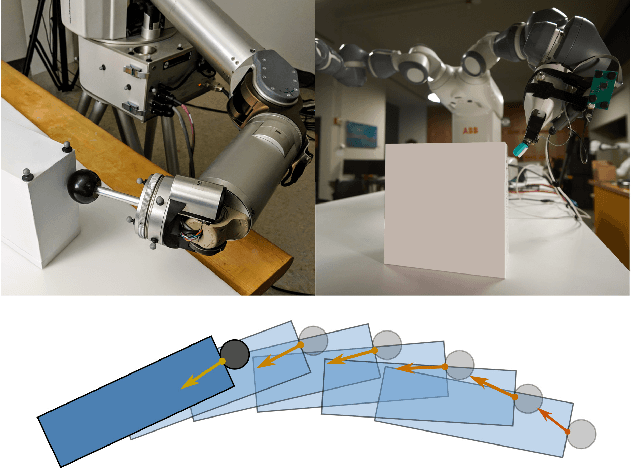
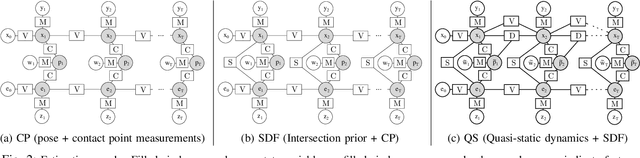
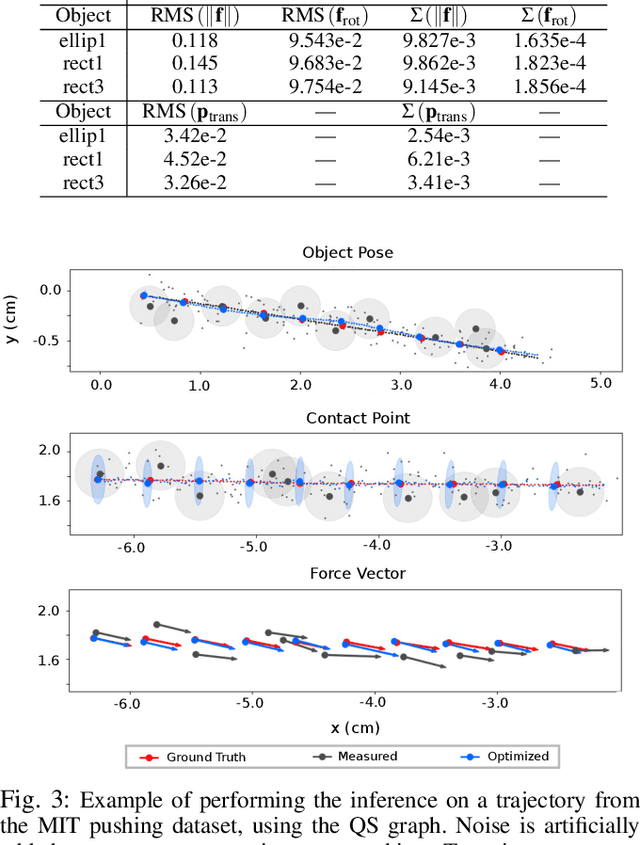
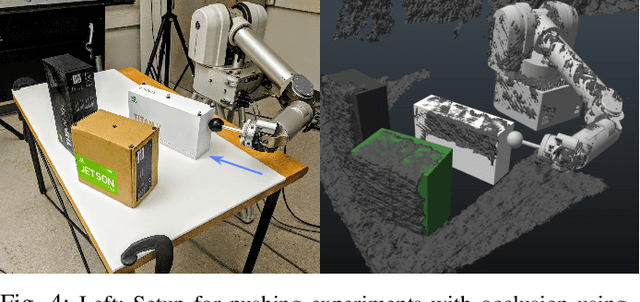
To perform complex tasks, robots must be able to interact with and manipulate their surroundings. One of the key challenges in accomplishing this is robust state estimation during physical interactions, where the state involves not only the robot and the object being manipulated, but also the state of the contact itself. In this work, within the context of planar pushing, we extend previous inference-based approaches to state estimation in several ways. We estimate the robot, object, and the contact state on multiple manipulation platforms configured with a vision-based articulated model tracker, and either a biomimetic tactile sensor or a force-torque sensor. We show how to fuse raw measurements from the tracker and tactile sensors to jointly estimate the trajectory of the kinematic states and the forces in the system via probabilistic inference on factor graphs, in both batch and incremental settings. We perform several benchmarks with our framework and show how performance is affected by incorporating various geometric and physics based constraints, occluding vision sensors, or injecting noise in tactile sensors. We also compare with prior work on multiple datasets and demonstrate that our approach can effectively optimize over multi-modal sensor data and reduce uncertainty to find better state estimates.