 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEFM3D: A Benchmark for Measuring Progress Towards 3D Egocentric Foundation Models
Jun 14, 2024



The advent of wearable computers enables a new source of context for AI that is embedded in egocentric sensor data. This new egocentric data comes equipped with fine-grained 3D location information and thus presents the opportunity for a novel class of spatial foundation models that are rooted in 3D space. To measure progress on what we term Egocentric Foundation Models (EFMs) we establish EFM3D, a benchmark with two core 3D egocentric perception tasks. EFM3D is the first benchmark for 3D object detection and surface regression on high quality annotated egocentric data of Project Aria. We propose Egocentric Voxel Lifting (EVL), a baseline for 3D EFMs. EVL leverages all available egocentric modalities and inherits foundational capabilities from 2D foundation models. This model, trained on a large simulated dataset, outperforms existing methods on the EFM3D benchmark.
STT: Stateful Tracking with Transformers for Autonomous Driving
Apr 30, 2024Tracking objects in three-dimensional space is critical for autonomous driving. To ensure safety while driving, the tracker must be able to reliably track objects across frames and accurately estimate their states such as velocity and acceleration in the present. Existing works frequently focus on the association task while either neglecting the model performance on state estimation or deploying complex heuristics to predict the states. In this paper, we propose STT, a Stateful Tracking model built with Transformers, that can consistently track objects in the scenes while also predicting their states accurately. STT consumes rich appearance, geometry, and motion signals through long term history of detections and is jointly optimized for both data association and state estimation tasks. Since the standard tracking metrics like MOTA and MOTP do not capture the combined performance of the two tasks in the wider spectrum of object states, we extend them with new metrics called S-MOTA and MOTPS that address this limitation. STT achieves competitive real-time performance on the Waymo Open Dataset.
EgoLifter: Open-world 3D Segmentation for Egocentric Perception
Mar 26, 2024In this paper we present EgoLifter, a novel system that can automatically segment scenes captured from egocentric sensors into a complete decomposition of individual 3D objects. The system is specifically designed for egocentric data where scenes contain hundreds of objects captured from natural (non-scanning) motion. EgoLifter adopts 3D Gaussians as the underlying representation of 3D scenes and objects and uses segmentation masks from the Segment Anything Model (SAM) as weak supervision to learn flexible and promptable definitions of object instances free of any specific object taxonomy. To handle the challenge of dynamic objects in ego-centric videos, we design a transient prediction module that learns to filter out dynamic objects in the 3D reconstruction. The result is a fully automatic pipeline that is able to reconstruct 3D object instances as collections of 3D Gaussians that collectively compose the entire scene. We created a new benchmark on the Aria Digital Twin dataset that quantitatively demonstrates its state-of-the-art performance in open-world 3D segmentation from natural egocentric input. We run EgoLifter on various egocentric activity datasets which shows the promise of the method for 3D egocentric perception at scale.
Aria Everyday Activities Dataset
Feb 22, 2024



We present Aria Everyday Activities (AEA) Dataset, an egocentric multimodal open dataset recorded using Project Aria glasses. AEA contains 143 daily activity sequences recorded by multiple wearers in five geographically diverse indoor locations. Each of the recording contains multimodal sensor data recorded through the Project Aria glasses. In addition, AEA provides machine perception data including high frequency globally aligned 3D trajectories, scene point cloud, per-frame 3D eye gaze vector and time aligned speech transcription. In this paper, we demonstrate a few exemplar research applications enabled by this dataset, including neural scene reconstruction and prompted segmentation. AEA is an open source dataset that can be downloaded from https://www.projectaria.com/datasets/aea/. We are also providing open-source implementations and examples of how to use the dataset in Project Aria Tools https://github.com/facebookresearch/projectaria_tools.
Nerfels: Renderable Neural Codes for Improved Camera Pose Estimation
Jun 04, 2022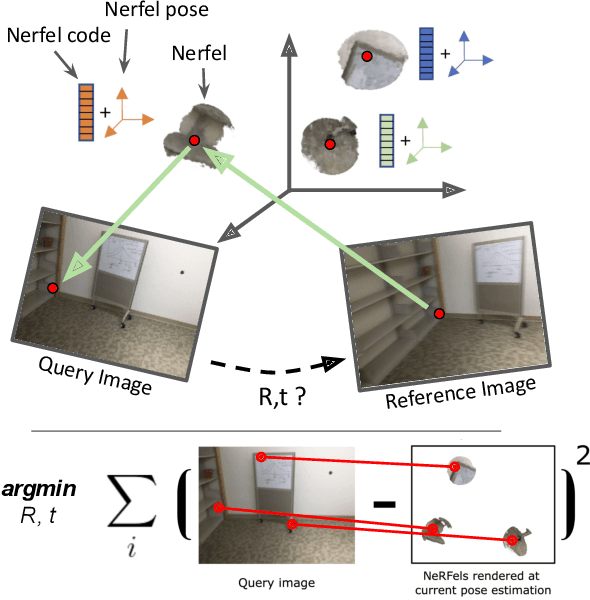
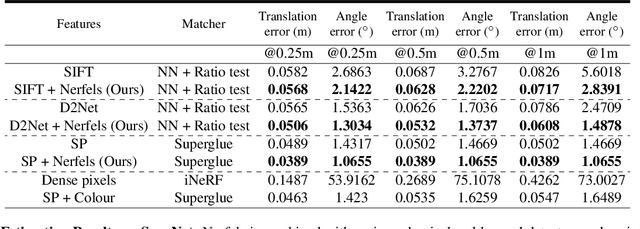

This paper presents a framework that combines traditional keypoint-based camera pose optimization with an invertible neural rendering mechanism. Our proposed 3D scene representation, Nerfels, is locally dense yet globally sparse. As opposed to existing invertible neural rendering systems which overfit a model to the entire scene, we adopt a feature-driven approach for representing scene-agnostic, local 3D patches with renderable codes. By modelling a scene only where local features are detected, our framework effectively generalizes to unseen local regions in the scene via an optimizable code conditioning mechanism in the neural renderer, all while maintaining the low memory footprint of a sparse 3D map representation. Our model can be incorporated to existing state-of-the-art hand-crafted and learned local feature pose estimators, yielding improved performance when evaluating on ScanNet for wide camera baseline scenarios.
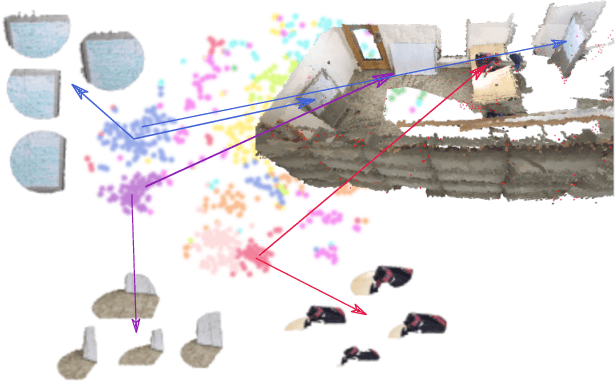
Self-supervised Neural Articulated Shape and Appearance Models
May 17, 2022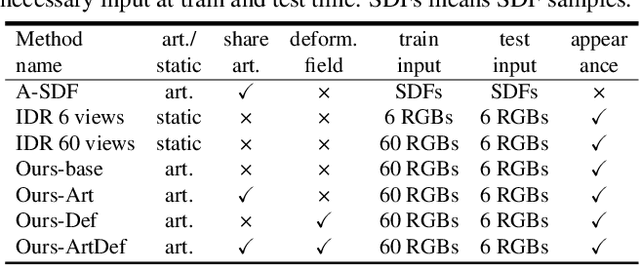

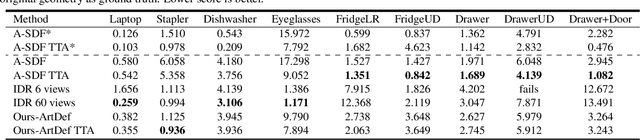

Learning geometry, motion, and appearance priors of object classes is important for the solution of a large variety of computer vision problems. While the majority of approaches has focused on static objects, dynamic objects, especially with controllable articulation, are less explored. We propose a novel approach for learning a representation of the geometry, appearance, and motion of a class of articulated objects given only a set of color images as input. In a self-supervised manner, our novel representation learns shape, appearance, and articulation codes that enable independent control of these semantic dimensions. Our model is trained end-to-end without requiring any articulation annotations. Experiments show that our approach performs well for different joint types, such as revolute and prismatic joints, as well as different combinations of these joints. Compared to state of the art that uses direct 3D supervision and does not output appearance, we recover more faithful geometry and appearance from 2D observations only. In addition, our representation enables a large variety of applications, such as few-shot reconstruction, the generation of novel articulations, and novel view-synthesis.
LISA: Learning Implicit Shape and Appearance of Hands
Apr 04, 2022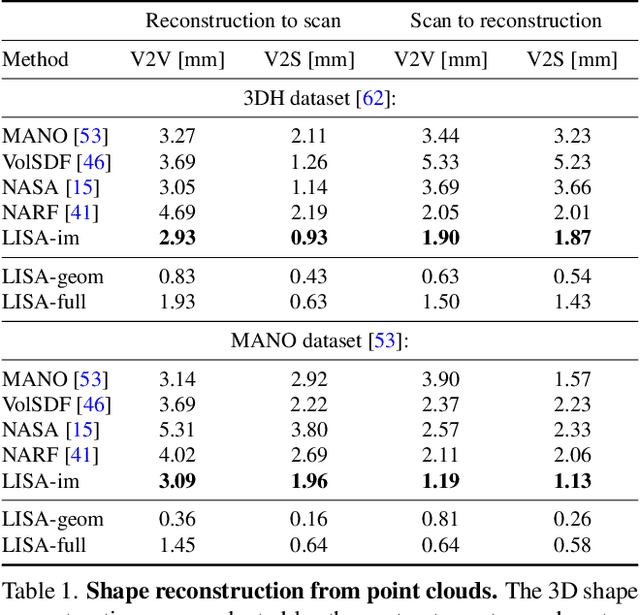
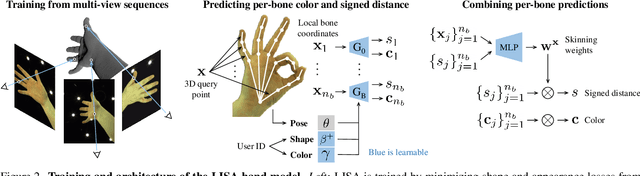
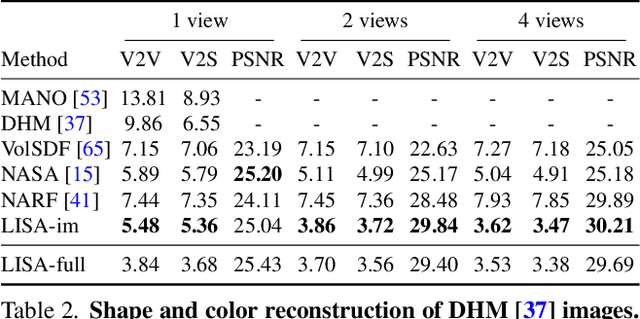
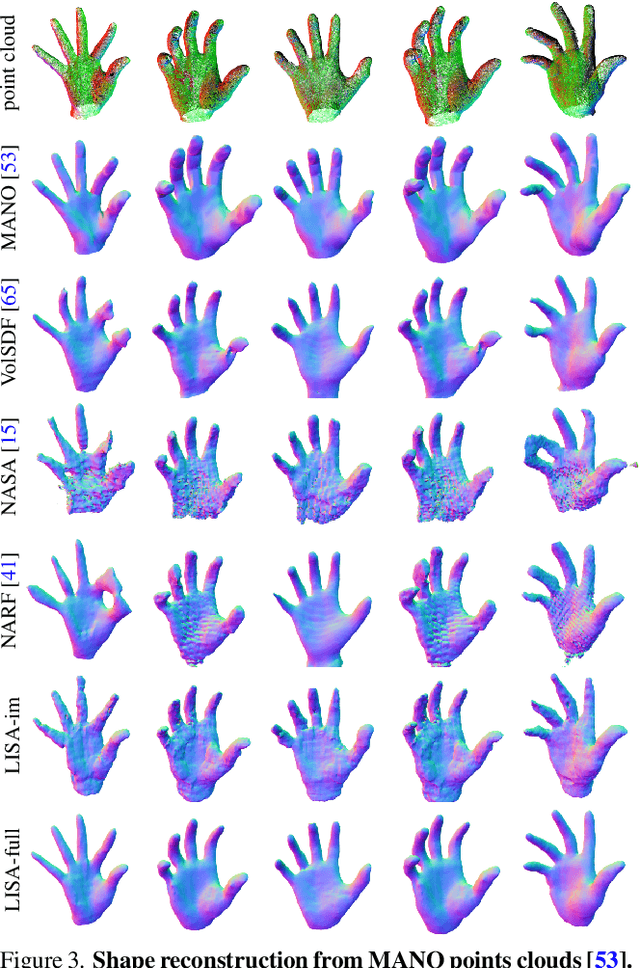
This paper proposes a do-it-all neural model of human hands, named LISA. The model can capture accurate hand shape and appearance, generalize to arbitrary hand subjects, provide dense surface correspondences, be reconstructed from images in the wild and easily animated. We train LISA by minimizing the shape and appearance losses on a large set of multi-view RGB image sequences annotated with coarse 3D poses of the hand skeleton. For a 3D point in the hand local coordinate, our model predicts the color and the signed distance with respect to each hand bone independently, and then combines the per-bone predictions using predicted skinning weights. The shape, color and pose representations are disentangled by design, allowing to estimate or animate only selected parameters. We experimentally demonstrate that LISA can accurately reconstruct a dynamic hand from monocular or multi-view sequences, achieving a noticeably higher quality of reconstructed hand shapes compared to baseline approaches. Project page: https://www.iri.upc.edu/people/ecorona/lisa/.
NinjaDesc: Content-Concealing Visual Descriptors via Adversarial Learning
Dec 23, 2021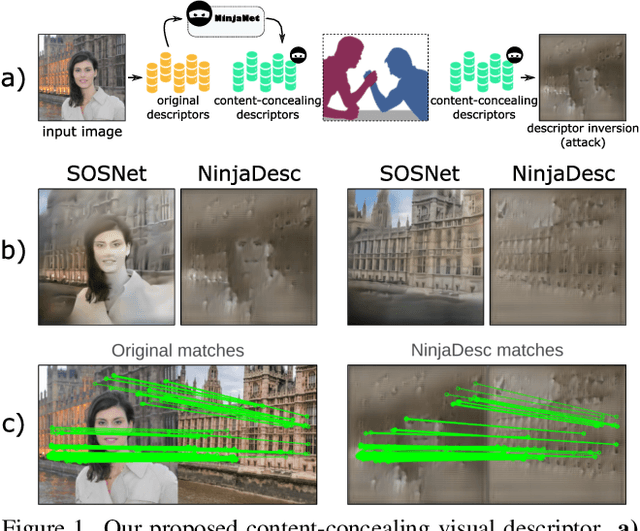
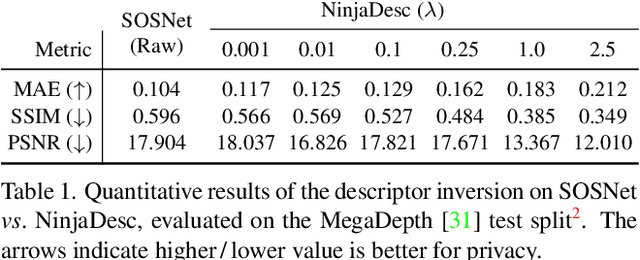
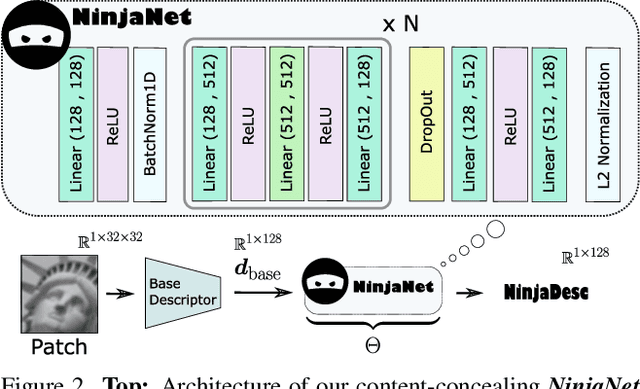
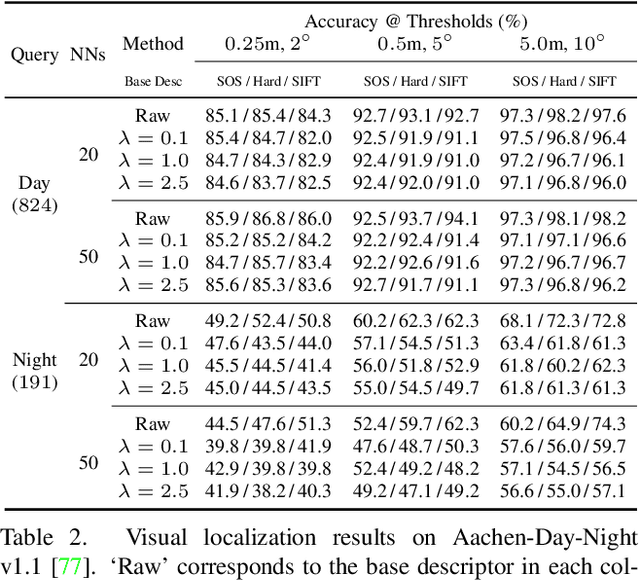
In the light of recent analyses on privacy-concerning scene revelation from visual descriptors, we develop descriptors that conceal the input image content. In particular, we propose an adversarial learning framework for training visual descriptors that prevent image reconstruction, while maintaining the matching accuracy. We let a feature encoding network and image reconstruction network compete with each other, such that the feature encoder tries to impede the image reconstruction with its generated descriptors, while the reconstructor tries to recover the input image from the descriptors. The experimental results demonstrate that the visual descriptors obtained with our method significantly deteriorate the image reconstruction quality with minimal impact on correspondence matching and camera localization performance.
ODAM: Object Detection, Association, and Mapping using Posed RGB Video
Aug 23, 2021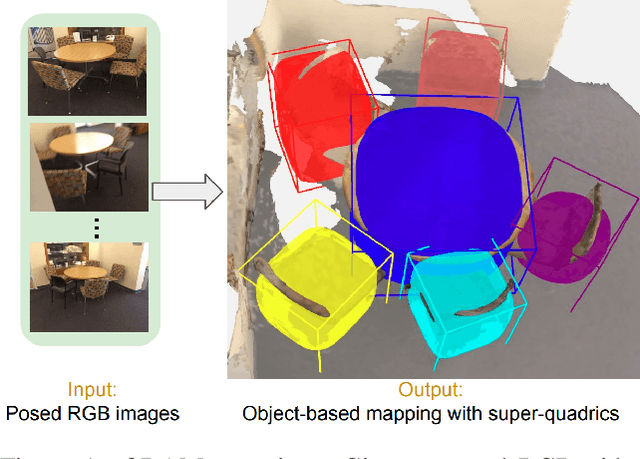

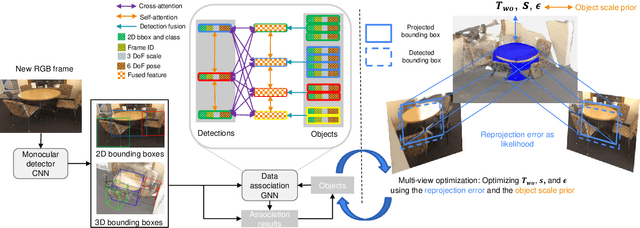
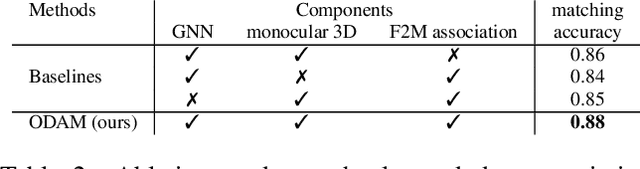
Localizing objects and estimating their extent in 3D is an important step towards high-level 3D scene understanding, which has many applications in Augmented Reality and Robotics. We present ODAM, a system for 3D Object Detection, Association, and Mapping using posed RGB videos. The proposed system relies on a deep learning front-end to detect 3D objects from a given RGB frame and associate them to a global object-based map using a graph neural network (GNN). Based on these frame-to-model associations, our back-end optimizes object bounding volumes, represented as super-quadrics, under multi-view geometry constraints and the object scale prior. We validate the proposed system on ScanNet where we show a significant improvement over existing RGB-only methods.
Scalable Scene Flow from Point Clouds in the Real World
Mar 15, 2021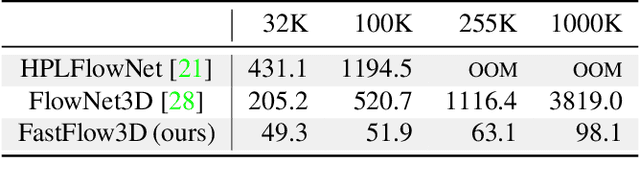
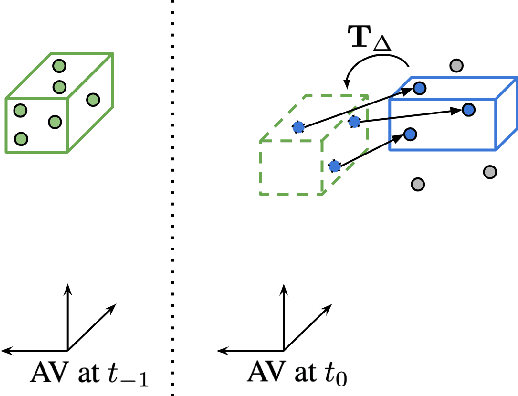
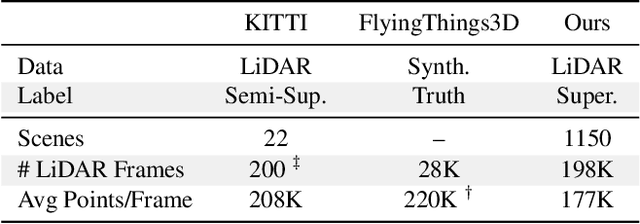
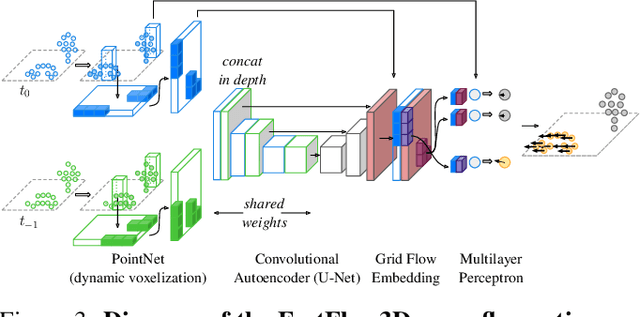
Autonomous vehicles operate in highly dynamic environments necessitating an accurate assessment of which aspects of a scene are moving and where they are moving to. A popular approach to 3D motion estimation -- termed scene flow -- is to employ 3D point cloud data from consecutive LiDAR scans, although such approaches have been limited by the small size of real-world, annotated LiDAR data. In this work, we introduce a new large scale benchmark for scene flow based on the Waymo Open Dataset. The dataset is $\sim$1,000$\times$ larger than previous real-world datasets in terms of the number of annotated frames and is derived from the corresponding tracked 3D objects. We demonstrate how previous works were bounded based on the amount of real LiDAR data available, suggesting that larger datasets are required to achieve state-of-the-art predictive performance. Furthermore, we show how previous heuristics for operating on point clouds such as artificial down-sampling heavily degrade performance, motivating a new class of models that are tractable on the full point cloud. To address this issue, we introduce the model architecture FastFlow3D that provides real time inference on the full point cloud. Finally, we demonstrate that this problem is amenable to techniques from semi-supervised learning by highlighting open problems for generalizing methods for predicting motion on unlabeled objects. We hope that this dataset may provide new opportunities for developing real world scene flow systems and motivate a new class of machine learning problems.