 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoregressive Appearance Prediction for 3D Gaussian Avatars
Apr 01, 2026A photorealistic and immersive human avatar experience demands capturing fine, person-specific details such as cloth and hair dynamics, subtle facial expressions, and characteristic motion patterns. Achieving this requires large, high-quality datasets, which often introduce ambiguities and spurious correlations when very similar poses correspond to different appearances. Models that fit these details during training can overfit and produce unstable, abrupt appearance changes for novel poses. We propose a 3D Gaussian Splatting avatar model with a spatial MLP backbone that is conditioned on both pose and an appearance latent. The latent is learned during training by an encoder, yielding a compact representation that improves reconstruction quality and helps disambiguate pose-driven renderings. At driving time, our predictor autoregressively infers the latent, producing temporally smooth appearance evolution and improved stability. Overall, our method delivers a robust and practical path to high-fidelity, stable avatar driving.
Fillerbuster: Multi-View Scene Completion for Casual Captures
Feb 07, 2025
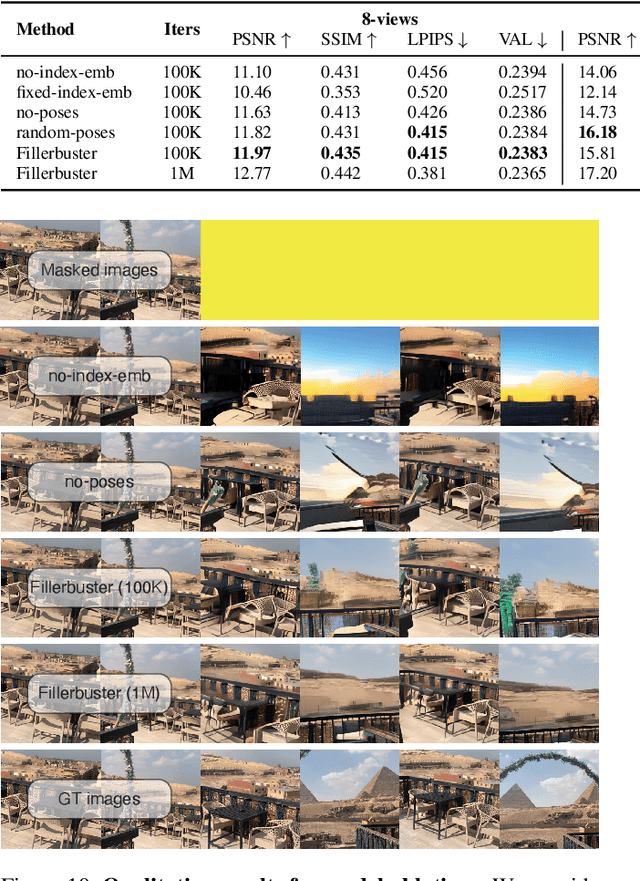
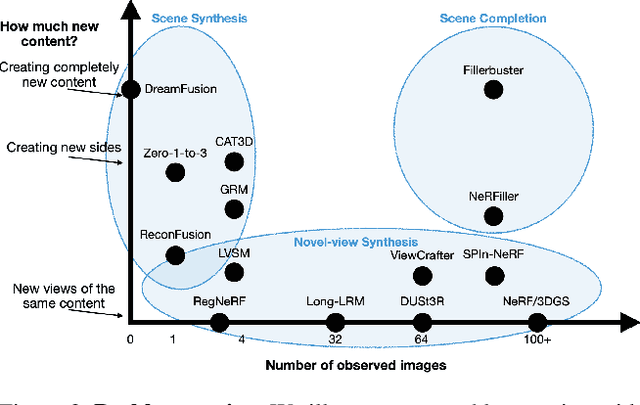

We present Fillerbuster, a method that completes unknown regions of a 3D scene by utilizing a novel large-scale multi-view latent diffusion transformer. Casual captures are often sparse and miss surrounding content behind objects or above the scene. Existing methods are not suitable for handling this challenge as they focus on making the known pixels look good with sparse-view priors, or on creating the missing sides of objects from just one or two photos. In reality, we often have hundreds of input frames and want to complete areas that are missing and unobserved from the input frames. Additionally, the images often do not have known camera parameters. Our solution is to train a generative model that can consume a large context of input frames while generating unknown target views and recovering image poses when desired. We show results where we complete partial captures on two existing datasets. We also present an uncalibrated scene completion task where our unified model predicts both poses and creates new content. Our model is the first to predict many images and poses together for scene completion.
Volumetric Surfaces: Representing Fuzzy Geometries with Multiple Meshes
Sep 04, 2024



High-quality real-time view synthesis methods are based on volume rendering, splatting, or surface rendering. While surface-based methods generally are the fastest, they cannot faithfully model fuzzy geometry like hair. In turn, alpha-blending techniques excel at representing fuzzy materials but require an unbounded number of samples per ray (P1). Further overheads are induced by empty space skipping in volume rendering (P2) and sorting input primitives in splatting (P3). These problems are exacerbated on low-performance graphics hardware, e.g. on mobile devices. We present a novel representation for real-time view synthesis where the (P1) number of sampling locations is small and bounded, (P2) sampling locations are efficiently found via rasterization, and (P3) rendering is sorting-free. We achieve this by representing objects as semi-transparent multi-layer meshes, rendered in fixed layer order from outermost to innermost. We model mesh layers as SDF shells with optimal spacing learned during training. After baking, we fit UV textures to the corresponding meshes. We show that our method can represent challenging fuzzy objects while achieving higher frame rates than volume-based and splatting-based methods on low-end and mobile devices.
ViewDiff: 3D-Consistent Image Generation with Text-to-Image Models
Mar 04, 2024



3D asset generation is getting massive amounts of attention, inspired by the recent success of text-guided 2D content creation. Existing text-to-3D methods use pretrained text-to-image diffusion models in an optimization problem or fine-tune them on synthetic data, which often results in non-photorealistic 3D objects without backgrounds. In this paper, we present a method that leverages pretrained text-to-image models as a prior, and learn to generate multi-view images in a single denoising process from real-world data. Concretely, we propose to integrate 3D volume-rendering and cross-frame-attention layers into each block of the existing U-Net network of the text-to-image model. Moreover, we design an autoregressive generation that renders more 3D-consistent images at any viewpoint. We train our model on real-world datasets of objects and showcase its capabilities to generate instances with a variety of high-quality shapes and textures in authentic surroundings. Compared to the existing methods, the results generated by our method are consistent, and have favorable visual quality (-30% FID, -37% KID).
IRIS: Inverse Rendering of Indoor Scenes from Low Dynamic Range Images
Jan 23, 2024While numerous 3D reconstruction and novel-view synthesis methods allow for photorealistic rendering of a scene from multi-view images easily captured with consumer cameras, they bake illumination in their representations and fall short of supporting advanced applications like material editing, relighting, and virtual object insertion. The reconstruction of physically based material properties and lighting via inverse rendering promises to enable such applications. However, most inverse rendering techniques require high dynamic range (HDR) images as input, a setting that is inaccessible to most users. We present a method that recovers the physically based material properties and spatially-varying HDR lighting of a scene from multi-view, low-dynamic-range (LDR) images. We model the LDR image formation process in our inverse rendering pipeline and propose a novel optimization strategy for material, lighting, and a camera response model. We evaluate our approach with synthetic and real scenes compared to the state-of-the-art inverse rendering methods that take either LDR or HDR input. Our method outperforms existing methods taking LDR images as input, and allows for highly realistic relighting and object insertion.
URHand: Universal Relightable Hands
Jan 10, 2024



Existing photorealistic relightable hand models require extensive identity-specific observations in different views, poses, and illuminations, and face challenges in generalizing to natural illuminations and novel identities. To bridge this gap, we present URHand, the first universal relightable hand model that generalizes across viewpoints, poses, illuminations, and identities. Our model allows few-shot personalization using images captured with a mobile phone, and is ready to be photorealistically rendered under novel illuminations. To simplify the personalization process while retaining photorealism, we build a powerful universal relightable prior based on neural relighting from multi-view images of hands captured in a light stage with hundreds of identities. The key challenge is scaling the cross-identity training while maintaining personalized fidelity and sharp details without compromising generalization under natural illuminations. To this end, we propose a spatially varying linear lighting model as the neural renderer that takes physics-inspired shading as input feature. By removing non-linear activations and bias, our specifically designed lighting model explicitly keeps the linearity of light transport. This enables single-stage training from light-stage data while generalizing to real-time rendering under arbitrary continuous illuminations across diverse identities. In addition, we introduce the joint learning of a physically based model and our neural relighting model, which further improves fidelity and generalization. Extensive experiments show that our approach achieves superior performance over existing methods in terms of both quality and generalizability. We also demonstrate quick personalization of URHand from a short phone scan of an unseen identity.
SpecNeRF: Gaussian Directional Encoding for Specular Reflections
Dec 20, 2023



Neural radiance fields have achieved remarkable performance in modeling the appearance of 3D scenes. However, existing approaches still struggle with the view-dependent appearance of glossy surfaces, especially under complex lighting of indoor environments. Unlike existing methods, which typically assume distant lighting like an environment map, we propose a learnable Gaussian directional encoding to better model the view-dependent effects under near-field lighting conditions. Importantly, our new directional encoding captures the spatially-varying nature of near-field lighting and emulates the behavior of prefiltered environment maps. As a result, it enables the efficient evaluation of preconvolved specular color at any 3D location with varying roughness coefficients. We further introduce a data-driven geometry prior that helps alleviate the shape radiance ambiguity in reflection modeling. We show that our Gaussian directional encoding and geometry prior significantly improve the modeling of challenging specular reflections in neural radiance fields, which helps decompose appearance into more physically meaningful components.
HybridNeRF: Efficient Neural Rendering via Adaptive Volumetric Surfaces
Dec 05, 2023Neural radiance fields provide state-of-the-art view synthesis quality but tend to be slow to render. One reason is that they make use of volume rendering, thus requiring many samples (and model queries) per ray at render time. Although this representation is flexible and easy to optimize, most real-world objects can be modeled more efficiently with surfaces instead of volumes, requiring far fewer samples per ray. This observation has spurred considerable progress in surface representations such as signed distance functions, but these may struggle to model semi-opaque and thin structures. We propose a method, HybridNeRF, that leverages the strengths of both representations by rendering most objects as surfaces while modeling the (typically) small fraction of challenging regions volumetrically. We evaluate HybridNeRF against the challenging Eyeful Tower dataset along with other commonly used view synthesis datasets. When comparing to state-of-the-art baselines, including recent rasterization-based approaches, we improve error rates by 15-30% while achieving real-time framerates (at least 36 FPS) for virtual-reality resolutions (2Kx2K).
PyNeRF: Pyramidal Neural Radiance Fields
Nov 30, 2023Neural Radiance Fields (NeRFs) can be dramatically accelerated by spatial grid representations. However, they do not explicitly reason about scale and so introduce aliasing artifacts when reconstructing scenes captured at different camera distances. Mip-NeRF and its extensions propose scale-aware renderers that project volumetric frustums rather than point samples but such approaches rely on positional encodings that are not readily compatible with grid methods. We propose a simple modification to grid-based models by training model heads at different spatial grid resolutions. At render time, we simply use coarser grids to render samples that cover larger volumes. Our method can be easily applied to existing accelerated NeRF methods and significantly improves rendering quality (reducing error rates by 20-90% across synthetic and unbounded real-world scenes) while incurring minimal performance overhead (as each model head is quick to evaluate). Compared to Mip-NeRF, we reduce error rates by 20% while training over 60x faster.
Drivable 3D Gaussian Avatars
Nov 14, 2023We present Drivable 3D Gaussian Avatars (D3GA), the first 3D controllable model for human bodies rendered with Gaussian splats. Current photorealistic drivable avatars require either accurate 3D registrations during training, dense input images during testing, or both. The ones based on neural radiance fields also tend to be prohibitively slow for telepresence applications. This work uses the recently presented 3D Gaussian Splatting (3DGS) technique to render realistic humans at real-time framerates, using dense calibrated multi-view videos as input. To deform those primitives, we depart from the commonly used point deformation method of linear blend skinning (LBS) and use a classic volumetric deformation method: cage deformations. Given their smaller size, we drive these deformations with joint angles and keypoints, which are more suitable for communication applications. Our experiments on nine subjects with varied body shapes, clothes, and motions obtain higher-quality results than state-of-the-art methods when using the same training and test data.