 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMany-Shot In-Context Learning
Apr 17, 2024



Large language models (LLMs) excel at few-shot in-context learning (ICL) -- learning from a few examples provided in context at inference, without any weight updates. Newly expanded context windows allow us to investigate ICL with hundreds or thousands of examples -- the many-shot regime. Going from few-shot to many-shot, we observe significant performance gains across a wide variety of generative and discriminative tasks. While promising, many-shot ICL can be bottlenecked by the available amount of human-generated examples. To mitigate this limitation, we explore two new settings: Reinforced and Unsupervised ICL. Reinforced ICL uses model-generated chain-of-thought rationales in place of human examples. Unsupervised ICL removes rationales from the prompt altogether, and prompts the model only with domain-specific questions. We find that both Reinforced and Unsupervised ICL can be quite effective in the many-shot regime, particularly on complex reasoning tasks. Finally, we demonstrate that, unlike few-shot learning, many-shot learning is effective at overriding pretraining biases and can learn high-dimensional functions with numerical inputs. Our analysis also reveals the limitations of next-token prediction loss as an indicator of downstream ICL performance.
Beyond Human Data: Scaling Self-Training for Problem-Solving with Language Models
Dec 22, 2023



Fine-tuning language models~(LMs) on human-generated data remains a prevalent practice. However, the performance of such models is often limited by the quantity and diversity of high-quality human data. In this paper, we explore whether we can go beyond human data on tasks where we have access to scalar feedback, for example, on math problems where one can verify correctness. To do so, we investigate a simple self-training method based on expectation-maximization, which we call ReST$^{EM}$, where we (1) generate samples from the model and filter them using binary feedback, (2) fine-tune the model on these samples, and (3) repeat this process a few times. Testing on advanced MATH reasoning and APPS coding benchmarks using PaLM-2 models, we find that ReST$^{EM}$ scales favorably with model size and significantly surpasses fine-tuning only on human data. Overall, our findings suggest self-training with feedback can substantially reduce dependence on human-generated data.
Improving Large Language Model Fine-tuning for Solving Math Problems
Oct 16, 2023Despite their success in many natural language tasks, solving math problems remains a significant challenge for large language models (LLMs). A large gap exists between LLMs' pass-at-one and pass-at-N performance in solving math problems, suggesting LLMs might be close to finding correct solutions, motivating our exploration of fine-tuning methods to unlock LLMs' performance. Using the challenging MATH dataset, we investigate three fine-tuning strategies: (1) solution fine-tuning, where we fine-tune to generate a detailed solution for a given math problem; (2) solution-cluster re-ranking, where the LLM is fine-tuned as a solution verifier/evaluator to choose among generated candidate solution clusters; (3) multi-task sequential fine-tuning, which integrates both solution generation and evaluation tasks together efficiently to enhance the LLM performance. With these methods, we present a thorough empirical study on a series of PaLM 2 models and find: (1) The quality and style of the step-by-step solutions used for fine-tuning can make a significant impact on the model performance; (2) While solution re-ranking and majority voting are both effective for improving the model performance when used separately, they can also be used together for an even greater performance boost; (3) Multi-task fine-tuning that sequentially separates the solution generation and evaluation tasks can offer improved performance compared with the solution fine-tuning baseline. Guided by these insights, we design a fine-tuning recipe that yields approximately 58.8% accuracy on the MATH dataset with fine-tuned PaLM 2-L models, an 11.2% accuracy improvement over the few-shot performance of pre-trained PaLM 2-L model with majority voting.
Robotic Table Tennis: A Case Study into a High Speed Learning System
Sep 06, 2023



We present a deep-dive into a real-world robotic learning system that, in previous work, was shown to be capable of hundreds of table tennis rallies with a human and has the ability to precisely return the ball to desired targets. This system puts together a highly optimized perception subsystem, a high-speed low-latency robot controller, a simulation paradigm that can prevent damage in the real world and also train policies for zero-shot transfer, and automated real world environment resets that enable autonomous training and evaluation on physical robots. We complement a complete system description, including numerous design decisions that are typically not widely disseminated, with a collection of studies that clarify the importance of mitigating various sources of latency, accounting for training and deployment distribution shifts, robustness of the perception system, sensitivity to policy hyper-parameters, and choice of action space. A video demonstrating the components of the system and details of experimental results can be found at https://youtu.be/uFcnWjB42I0.
Visual Backtracking Teleoperation: A Data Collection Protocol for Offline Image-Based Reinforcement Learning
Oct 05, 2022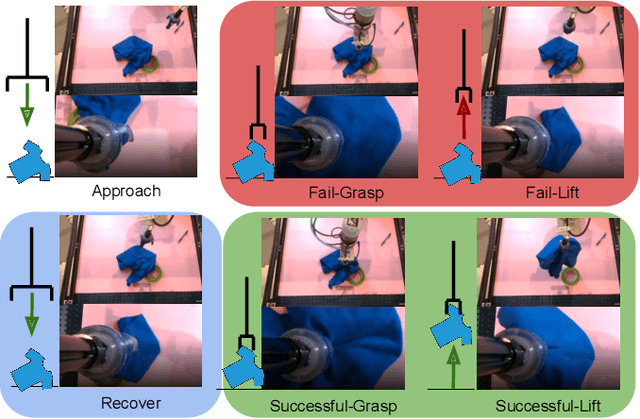
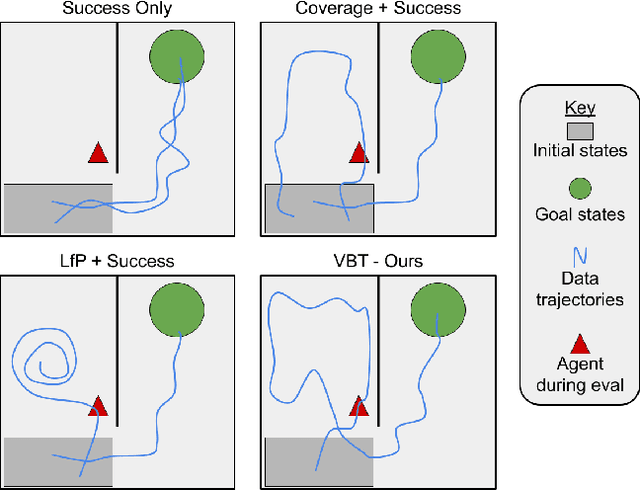
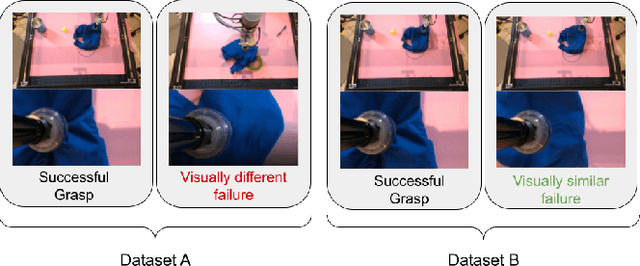
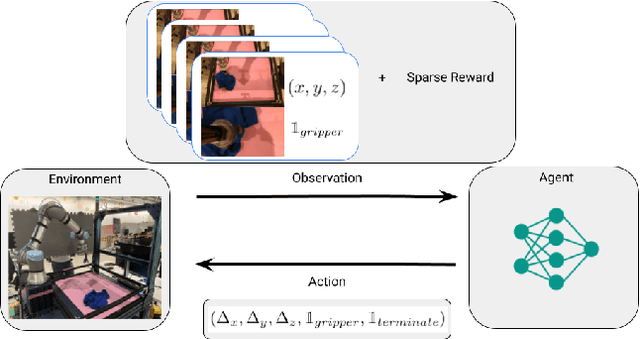
We consider how to most efficiently leverage teleoperator time to collect data for learning robust image-based value functions and policies for sparse reward robotic tasks. To accomplish this goal, we modify the process of data collection to include more than just successful demonstrations of the desired task. Instead we develop a novel protocol that we call Visual Backtracking Teleoperation (VBT), which deliberately collects a dataset of visually similar failures, recoveries, and successes. VBT data collection is particularly useful for efficiently learning accurate value functions from small datasets of image-based observations. We demonstrate VBT on a real robot to perform continuous control from image observations for the deformable manipulation task of T-shirt grasping. We find that by adjusting the data collection process we improve the quality of both the learned value functions and policies over a variety of baseline methods for data collection. Specifically, we find that offline reinforcement learning on VBT data outperforms standard behavior cloning on successful demonstration data by 13% when both methods are given equal-sized datasets of 60 minutes of data from the real robot.
Don't Start From Scratch: Leveraging Prior Data to Automate Robotic Reinforcement Learning
Jul 17, 2022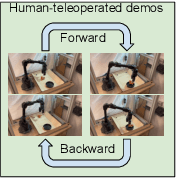
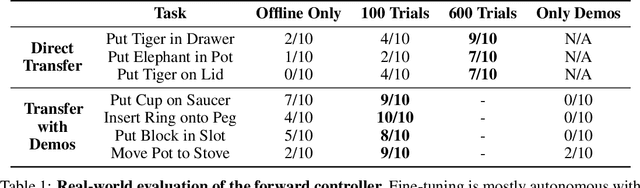
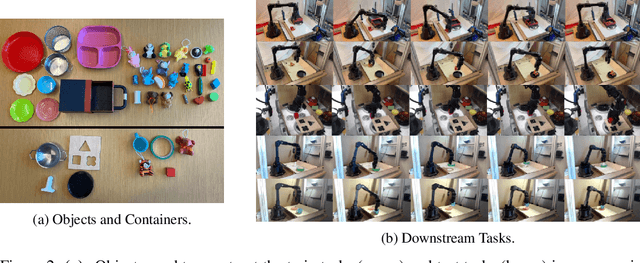
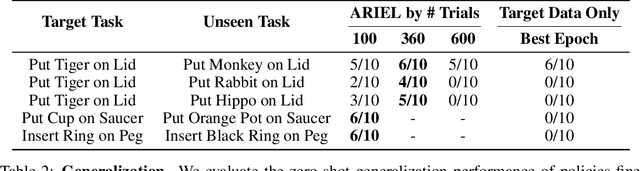
Reinforcement learning (RL) algorithms hold the promise of enabling autonomous skill acquisition for robotic systems. However, in practice, real-world robotic RL typically requires time consuming data collection and frequent human intervention to reset the environment. Moreover, robotic policies learned with RL often fail when deployed beyond the carefully controlled setting in which they were learned. In this work, we study how these challenges can all be tackled by effective utilization of diverse offline datasets collected from previously seen tasks. When faced with a new task, our system adapts previously learned skills to quickly learn to both perform the new task and return the environment to an initial state, effectively performing its own environment reset. Our empirical results demonstrate that incorporating prior data into robotic reinforcement learning enables autonomous learning, substantially improves sample-efficiency of learning, and enables better generalization. Project website: https://sites.google.com/view/ariel-berkeley/
i-Sim2Real: Reinforcement Learning of Robotic Policies in Tight Human-Robot Interaction Loops
Jul 14, 2022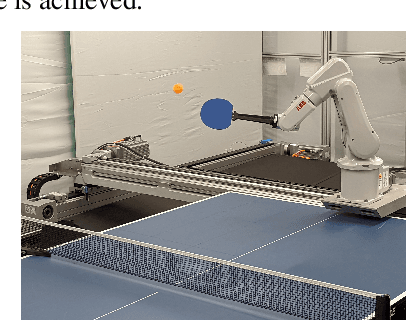
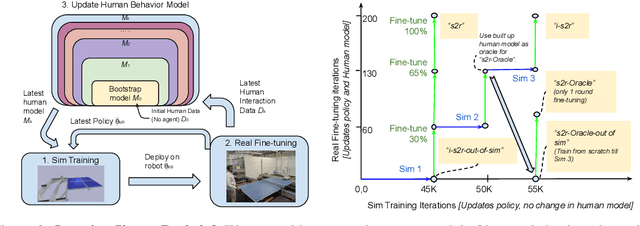
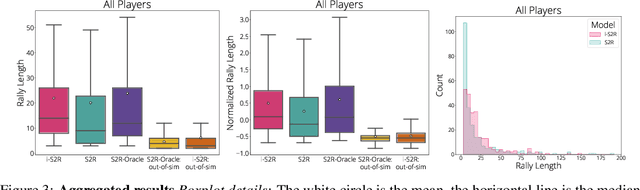
Sim-to-real transfer is a powerful paradigm for robotic reinforcement learning. The ability to train policies in simulation enables safe exploration and large-scale data collection quickly at low cost. However, prior works in sim-to-real transfer of robotic policies typically do not involve any human-robot interaction because accurately simulating human behavior is an open problem. In this work, our goal is to leverage the power of simulation to train robotic policies that are proficient at interacting with humans upon deployment. But there is a chicken and egg problem -- how do we gather examples of a human interacting with a physical robot so as to model human behavior in simulation without already having a robot that is able to interact with a human? Our proposed method, Iterative-Sim-to-Real (i-S2R), attempts to address this. i-S2R bootstraps from a simple model of human behavior and alternates between training in simulation and deploying in the real world. In each iteration, both the human behavior model and the policy are refined. We evaluate our method on a real world robotic table tennis setting, where the objective for the robot is to play cooperatively with a human player for as long as possible. Table tennis is a high-speed, dynamic task that requires the two players to react quickly to each other's moves, making a challenging test bed for research on human-robot interaction. We present results on an industrial robotic arm that is able to cooperatively play table tennis with human players, achieving rallies of 22 successive hits on average and 150 at best. Further, for 80% of players, rally lengths are 70% to 175% longer compared to the sim-to-real (S2R) baseline. For videos of our system in action, please see https://sites.google.com/view/is2r.
Parrot: Data-Driven Behavioral Priors for Reinforcement Learning
Nov 19, 2020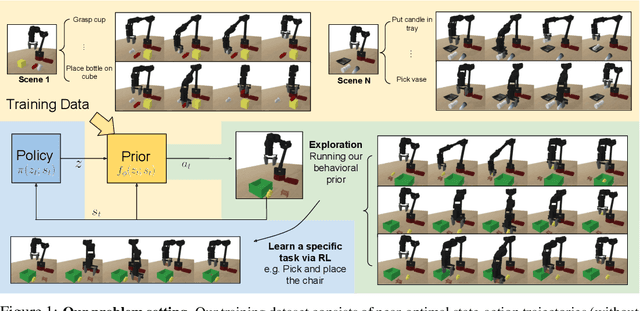
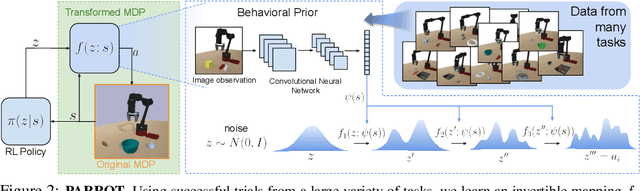
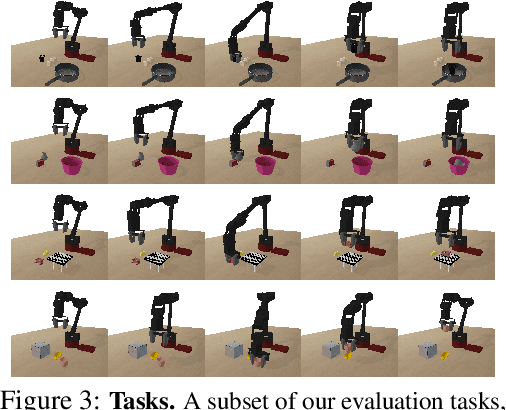
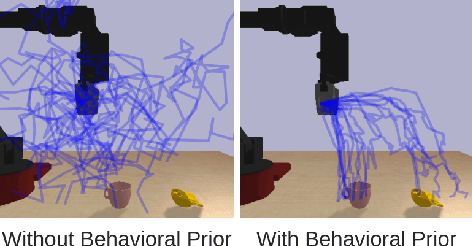
Reinforcement learning provides a general framework for flexible decision making and control, but requires extensive data collection for each new task that an agent needs to learn. In other machine learning fields, such as natural language processing or computer vision, pre-training on large, previously collected datasets to bootstrap learning for new tasks has emerged as a powerful paradigm to reduce data requirements when learning a new task. In this paper, we ask the following question: how can we enable similarly useful pre-training for RL agents? We propose a method for pre-training behavioral priors that can capture complex input-output relationships observed in successful trials from a wide range of previously seen tasks, and we show how this learned prior can be used for rapidly learning new tasks without impeding the RL agent's ability to try out novel behaviors. We demonstrate the effectiveness of our approach in challenging robotic manipulation domains involving image observations and sparse reward functions, where our method outperforms prior works by a substantial margin.
COG: Connecting New Skills to Past Experience with Offline Reinforcement Learning
Oct 27, 2020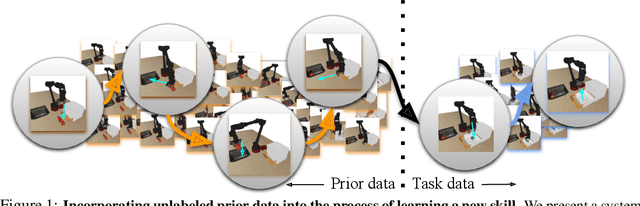
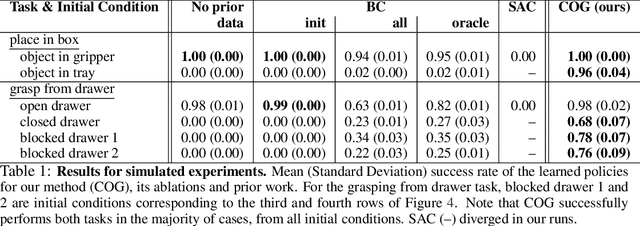
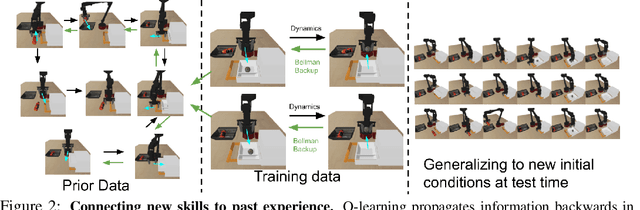
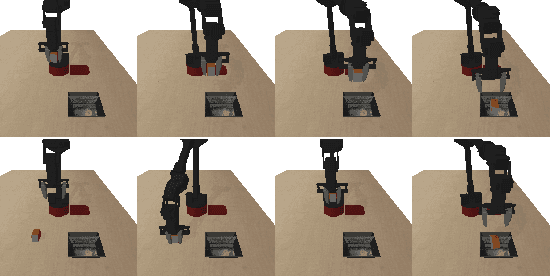
Reinforcement learning has been applied to a wide variety of robotics problems, but most of such applications involve collecting data from scratch for each new task. Since the amount of robot data we can collect for any single task is limited by time and cost considerations, the learned behavior is typically narrow: the policy can only execute the task in a handful of scenarios that it was trained on. What if there was a way to incorporate a large amount of prior data, either from previously solved tasks or from unsupervised or undirected environment interaction, to extend and generalize learned behaviors? While most prior work on extending robotic skills using pre-collected data focuses on building explicit hierarchies or skill decompositions, we show in this paper that we can reuse prior data to extend new skills simply through dynamic programming. We show that even when the prior data does not actually succeed at solving the new task, it can still be utilized for learning a better policy, by providing the agent with a broader understanding of the mechanics of its environment. We demonstrate the effectiveness of our approach by chaining together several behaviors seen in prior datasets for solving a new task, with our hardest experimental setting involving composing four robotic skills in a row: picking, placing, drawer opening, and grasping, where a +1/0 sparse reward is provided only on task completion. We train our policies in an end-to-end fashion, mapping high-dimensional image observations to low-level robot control commands, and present results in both simulated and real world domains. Additional materials and source code can be found on our project website: https://sites.google.com/view/cog-rl
The Ingredients of Real-World Robotic Reinforcement Learning
Apr 27, 2020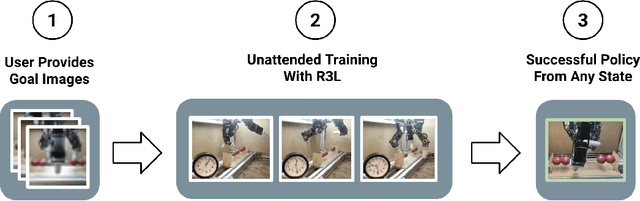
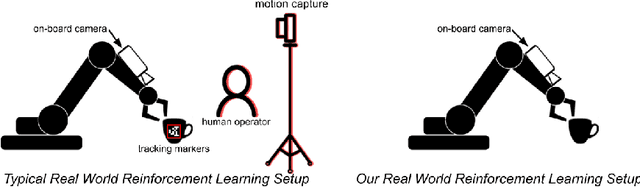
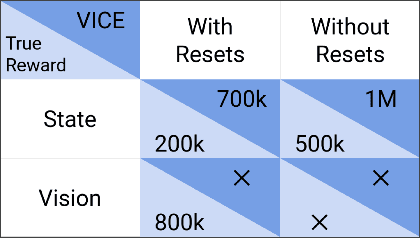
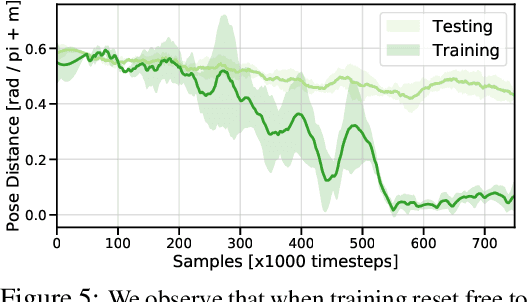
The success of reinforcement learning for real world robotics has been, in many cases limited to instrumented laboratory scenarios, often requiring arduous human effort and oversight to enable continuous learning. In this work, we discuss the elements that are needed for a robotic learning system that can continually and autonomously improve with data collected in the real world. We propose a particular instantiation of such a system, using dexterous manipulation as our case study. Subsequently, we investigate a number of challenges that come up when learning without instrumentation. In such settings, learning must be feasible without manually designed resets, using only on-board perception, and without hand-engineered reward functions. We propose simple and scalable solutions to these challenges, and then demonstrate the efficacy of our proposed system on a set of dexterous robotic manipulation tasks, providing an in-depth analysis of the challenges associated with this learning paradigm. We demonstrate that our complete system can learn without any human intervention, acquiring a variety of vision-based skills with a real-world three-fingered hand. Results and videos can be found at https://sites.google.com/view/realworld-rl/