 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs It Truly Necessary to Process and Fit Minutes-Long Reference Videos for Personalized Talking Face Generation?
Nov 11, 2025Talking Face Generation (TFG) aims to produce realistic and dynamic talking portraits, with broad applications in fields such as digital education, film and television production, e-commerce live streaming, and other related areas. Currently, TFG methods based on Neural Radiated Field (NeRF) or 3D Gaussian sputtering (3DGS) are received widespread attention. They learn and store personalized features from reference videos of each target individual to generate realistic speaking videos. To ensure models can capture sufficient 3D information and successfully learns the lip-audio mapping, previous studies usually require meticulous processing and fitting several minutes of reference video, which always takes hours. The computational burden of processing and fitting long reference videos severely limits the practical application value of these methods.However, is it really necessary to fit such minutes of reference video? Our exploratory case studies show that using some informative reference video segments of just a few seconds can achieve performance comparable to or even better than the full reference video. This indicates that video informative quality is much more important than its length. Inspired by this observation, we propose the ISExplore (short for Informative Segment Explore), a simple-yet-effective segment selection strategy that automatically identifies the informative 5-second reference video segment based on three key data quality dimensions: audio feature diversity, lip movement amplitude, and number of camera views. Extensive experiments demonstrate that our approach increases data processing and training speed by more than 5x for NeRF and 3DGS methods, while maintaining high-fidelity output. Project resources are available at xx.
Teaching Pretrained Language Models to Think Deeper with Retrofitted Recurrence
Nov 10, 2025Recent advances in depth-recurrent language models show that recurrence can decouple train-time compute and parameter count from test-time compute. In this work, we study how to convert existing pretrained non-recurrent language models into depth-recurrent models. We find that using a curriculum of recurrences to increase the effective depth of the model over the course of training preserves performance while reducing total computational cost. In our experiments, on mathematics, we observe that converting pretrained models to recurrent ones results in better performance at a given compute budget than simply post-training the original non-recurrent language model.
CLM: Removing the GPU Memory Barrier for 3D Gaussian Splatting
Nov 07, 20253D Gaussian Splatting (3DGS) is an increasingly popular novel view synthesis approach due to its fast rendering time, and high-quality output. However, scaling 3DGS to large (or intricate) scenes is challenging due to its large memory requirement, which exceed most GPU's memory capacity. In this paper, we describe CLM, a system that allows 3DGS to render large scenes using a single consumer-grade GPU, e.g., RTX4090. It does so by offloading Gaussians to CPU memory, and loading them into GPU memory only when necessary. To reduce performance and communication overheads, CLM uses a novel offloading strategy that exploits observations about 3DGS's memory access pattern for pipelining, and thus overlap GPU-to-CPU communication, GPU computation and CPU computation. Furthermore, we also exploit observation about the access pattern to reduce communication volume. Our evaluation shows that the resulting implementation can render a large scene that requires 100 million Gaussians on a single RTX4090 and achieve state-of-the-art reconstruction quality.
The Unreasonable Effectiveness of Scaling Agents for Computer Use
Oct 02, 2025Computer-use agents (CUAs) hold promise for automating everyday digital tasks, but their unreliability and high variance hinder their application to long-horizon, complex tasks. We introduce Behavior Best-of-N (bBoN), a method that scales over agents by generating multiple rollouts and selecting among them using behavior narratives that describe the agents' rollouts. It enables both wide exploration and principled trajectory selection, substantially improving robustness and success rates. On OSWorld, our bBoN scaling method establishes a new state of the art (SoTA) at 69.9%, significantly outperforming prior methods and approaching human-level performance at 72%, with comprehensive ablations validating key design choices. We further demonstrate strong generalization results to different operating systems on WindowsAgentArena and AndroidWorld. Crucially, our results highlight the unreasonable effectiveness of scaling CUAs, when you do it right: effective scaling requires structured trajectory understanding and selection, and bBoN provides a practical framework to achieve this.
Local Linear Attention: An Optimal Interpolation of Linear and Softmax Attention For Test-Time Regression
Oct 01, 2025Transformer architectures have achieved remarkable success in various domains. While efficient alternatives to Softmax Attention have been widely studied, the search for more expressive mechanisms grounded in theoretical insight-even at greater computational cost-has been relatively underexplored. In this work, we bridge this gap by proposing Local Linear Attention (LLA), a novel attention mechanism derived from nonparametric statistics through the lens of test-time regression. First, we show that LLA offers theoretical advantages over Linear and Softmax Attention for associative memory via a bias-variance trade-off analysis. Next, we address its computational challenges and propose two memory-efficient primitives to tackle the $\Theta(n^2 d)$ and $\Theta(n d^2)$ complexity. We then introduce FlashLLA, a hardware-efficient, blockwise algorithm that enables scalable and parallel computation on modern accelerators. In addition, we implement and profile a customized inference kernel that significantly reduces memory overheads. Finally, we empirically validate the advantages and limitations of LLA on test-time regression, in-context regression, associative recall and state tracking tasks. Experiment results demonstrate that LLA effectively adapts to non-stationarity, outperforming strong baselines in test-time training and in-context learning, and exhibiting promising evidence for its scalability and applicability in large-scale models. Code is available at https://github.com/Yifei-Zuo/Flash-LLA.
Dense Video Understanding with Gated Residual Tokenization
Sep 18, 2025High temporal resolution is essential for capturing fine-grained details in video understanding. However, current video large language models (VLLMs) and benchmarks mostly rely on low-frame-rate sampling, such as uniform sampling or keyframe selection, discarding dense temporal information. This compromise avoids the high cost of tokenizing every frame, which otherwise leads to redundant computation and linear token growth as video length increases. While this trade-off works for slowly changing content, it fails for tasks like lecture comprehension, where information appears in nearly every frame and requires precise temporal alignment. To address this gap, we introduce Dense Video Understanding (DVU), which enables high-FPS video comprehension by reducing both tokenization time and token overhead. Existing benchmarks are also limited, as their QA pairs focus on coarse content changes. We therefore propose DIVE (Dense Information Video Evaluation), the first benchmark designed for dense temporal reasoning. To make DVU practical, we present Gated Residual Tokenization (GRT), a two-stage framework: (1) Motion-Compensated Inter-Gated Tokenization uses pixel-level motion estimation to skip static regions during tokenization, achieving sub-linear growth in token count and compute. (2) Semantic-Scene Intra-Tokenization Merging fuses tokens across static regions within a scene, further reducing redundancy while preserving dynamic semantics. Experiments on DIVE show that GRT outperforms larger VLLM baselines and scales positively with FPS. These results highlight the importance of dense temporal information and demonstrate that GRT enables efficient, scalable high-FPS video understanding.
DeepFleet: Multi-Agent Foundation Models for Mobile Robots
Aug 12, 2025



We introduce DeepFleet, a suite of foundation models designed to support coordination and planning for large-scale mobile robot fleets. These models are trained on fleet movement data, including robot positions, goals, and interactions, from hundreds of thousands of robots in Amazon warehouses worldwide. DeepFleet consists of four architectures that each embody a distinct inductive bias and collectively explore key points in the design space for multi-agent foundation models: the robot-centric (RC) model is an autoregressive decision transformer operating on neighborhoods of individual robots; the robot-floor (RF) model uses a transformer with cross-attention between robots and the warehouse floor; the image-floor (IF) model applies convolutional encoding to a multi-channel image representation of the full fleet; and the graph-floor (GF) model combines temporal attention with graph neural networks for spatial relationships. In this paper, we describe these models and present our evaluation of the impact of these design choices on prediction task performance. We find that the robot-centric and graph-floor models, which both use asynchronous robot state updates and incorporate the localized structure of robot interactions, show the most promise. We also present experiments that show that these two models can make effective use of larger warehouses operation datasets as the models are scaled up.
Optimal Interference Exploitation Waveform Design with Relaxed Block-Level Power Constraints
Aug 06, 2025This paper investigates constructive interference (CI)-based waveform design for phase shift keying and quadrature amplitude modulation symbols under relaxed block-level power constraints in multi-user multiple-input single-output (MU-MIMO) communication systems. Existing linear CI-based precoding methods, including symbol-level precoding (SLP) and block-level precoding (BLP), suffer from performance limitations due to strict symbol-level power budgets or insufficient degrees of freedom over the block. To overcome these challenges, we propose a nonlinear waveform optimization framework that introduces additional optimization variables and maximizes the minimum CI metric across the transmission block. The optimal waveform is derived in closed form using the function and Karush Kuhn Tucker conditions, and the solution is explicitly expressed with respect to the dual variables. Moreover, the original problems are equivalently reformulated as tractable quadratic programming (QP) problems. To efficiently solve the derived QP problems, we develop an improved alternating direction method of multipliers (ADMM) algorithm by integrating a linear-time projection technique, which significantly enhances the computational efficiency. Simulation results demonstrate that the proposed algorithms substantially outperform the conventional CI-SLP and CI-BLP approaches, particularly under high-order modulations and large block lengths.
End-to-end image compression and reconstruction with ultrahigh speed and ultralow energy enabled by opto-electronic computing processor
Jul 30, 2025The rapid development of AR/VR, remote sensing, satellite radar, and medical equipment has created an imperative demand for ultra efficient image compression and reconstruction that exceed the capabilities of electronic processors. For the first time, we demonstrate an end to end image compression and reconstruction approach using an optoelectronic computing processor,achieving orders of magnitude higher speed and lower energy consumption than electronic counterparts. At its core is a 32X32 silicon photonic computing chip, which monolithically integrates 32 high speed modulators, 32 detectors, and a programmable photonic matrix core, copackaged with all necessary control electronics (TIA, ADC, DAC, FPGA etc.). Leveraging the photonic matrix core programmability, the processor generates trainable compressive matrices, enabling adjustable image compression ratios (from 2X to 256X) to meet diverse application needs. Deploying a custom lightweight photonic integrated circuit oriented network (LiPICO-Net) enables high quality reconstruction of compressed images. Our approach delivers an end to end latency of only 49.5ps/pixel while consuming only less than 10.6nJ/pixel-both metrics representing 2-3 orders of magnitude improvement compared with classical models running on state-of-the-art GPUs. We validate the system on a 130 million-pixel aerial imagery, enabling real time compression where electronic systems falter due to power and latency constraints. This work not only provides a transformative solution for massive image processing but also opens new avenues for photonic computing applications.
Zebra-CoT: A Dataset for Interleaved Vision Language Reasoning
Jul 22, 2025
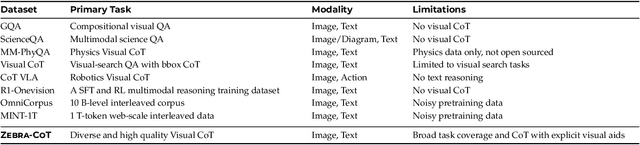


Humans often use visual aids, for example diagrams or sketches, when solving complex problems. Training multimodal models to do the same, known as Visual Chain of Thought (Visual CoT), is challenging due to: (1) poor off-the-shelf visual CoT performance, which hinders reinforcement learning, and (2) the lack of high-quality visual CoT training data. We introduce $\textbf{Zebra-CoT}$, a diverse large-scale dataset with 182,384 samples, containing logically coherent interleaved text-image reasoning traces. We focus on four categories of tasks where sketching or visual reasoning is especially natural, spanning scientific questions such as geometry, physics, and algorithms; 2D visual reasoning tasks like visual search and jigsaw puzzles; 3D reasoning tasks including 3D multi-hop inference, embodied and robot planning; visual logic problems and strategic games like chess. Fine-tuning the Anole-7B model on the Zebra-CoT training corpus results in an improvement of +12% in our test-set accuracy and yields up to +13% performance gain on standard VLM benchmark evaluations. Fine-tuning Bagel-7B yields a model that generates high-quality interleaved visual reasoning chains, underscoring Zebra-CoT's effectiveness for developing multimodal reasoning abilities. We open-source our dataset and models to support development and evaluation of visual CoT.