 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLION: Lidar-Inertial Observability-Aware Navigator for Vision-Denied Environments
Feb 05, 2021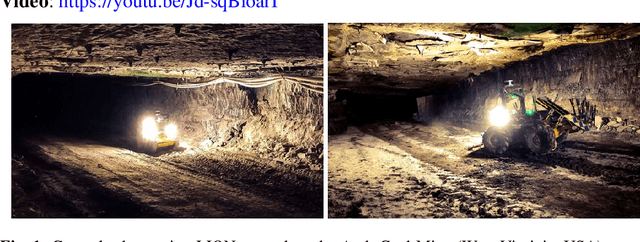
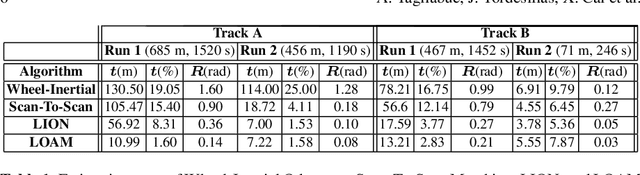
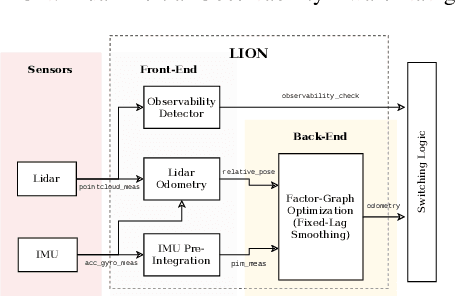
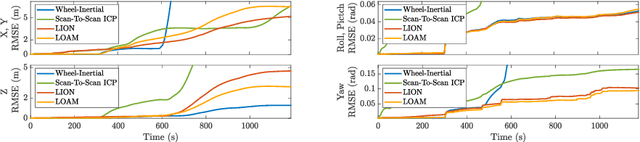
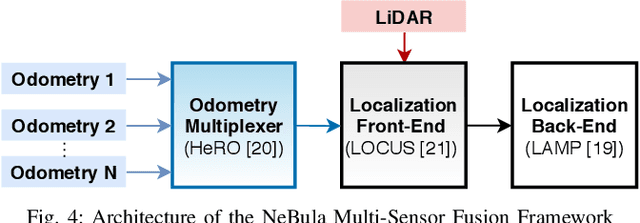
State estimation for robots navigating in GPS-denied and perceptually-degraded environments, such as underground tunnels, mines and planetary subsurface voids, remains challenging in robotics. Towards this goal, we present LION (Lidar-Inertial Observability-Aware Navigator), which is part of the state estimation framework developed by the team CoSTAR for the DARPA Subterranean Challenge, where the team achieved second and first places in the Tunnel and Urban circuits in August 2019 and February 2020, respectively. LION provides high-rate odometry estimates by fusing high-frequency inertial data from an IMU and low-rate relative pose estimates from a lidar via a fixed-lag sliding window smoother. LION does not require knowledge of relative positioning between lidar and IMU, as the extrinsic calibration is estimated online. In addition, LION is able to self-assess its performance using an observability metric that evaluates whether the pose estimate is geometrically ill-constrained. Odometry and confidence estimates are used by HeRO, a supervisory algorithm that provides robust estimates by switching between different odometry sources. In this paper we benchmark the performance of LION in perceptually-degraded subterranean environments, demonstrating its high technology readiness level for deployment in the field.
BAXTER: Bi-modal Aerial-Terrestrial Hybrid Vehicle for Long-endurance Versatile Mobility: Preprint Version
Feb 05, 2021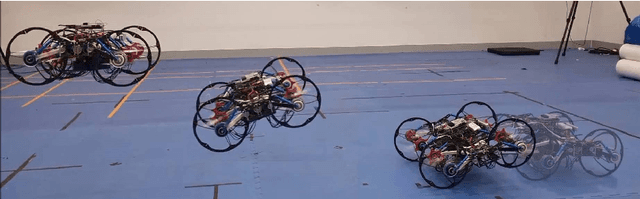
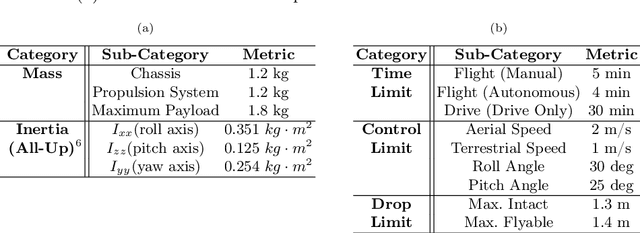
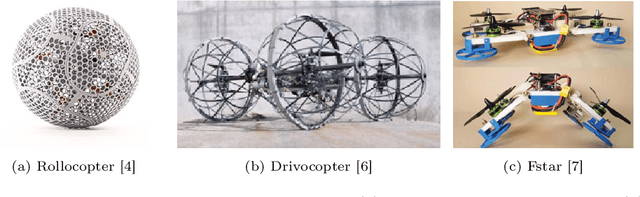
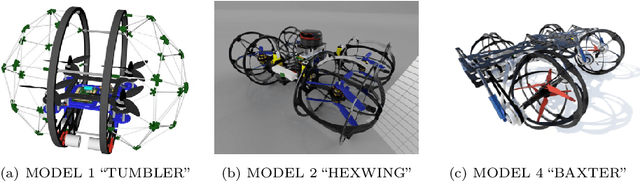
Unmanned aerial vehicles are rapidly evolving within the field of robotics. However, their performance is often limited by payload capacity, operational time, and robustness to impact and collision. These limitations of aerial vehicles become more acute for missions in challenging environments such as subterranean structures which may require extended autonomous operation in confined spaces. While software solutions for aerial robots are developing rapidly, improvements to hardware are critical to applying advanced planners and algorithms in large and dangerous environments where the short range and high susceptibility to collisions of most modern aerial robots make applications in realistic subterranean missions infeasible. To provide such hardware capabilities, one needs to design and implement a hardware solution that takes into the account the Size, Weight, and Power (SWaP) constraints. This work focuses on providing a robust and versatile hybrid platform that improves payload capacity, operation time, endurance, and versatility. The Bi-modal Aerial and Terrestrial hybrid vehicle (BAXTER) is a solution that provides two modes of operation, aerial and terrestrial. BAXTER employs two novel hardware mechanisms: the M-Suspension and the Decoupled Transmission which together provide resilience during landing and crashes and efficient terrestrial operation. Extensive flight tests were conducted to characterize the vehicle's capabilities, including robustness and endurance. Additionally, we propose Agile Mode Transfer (AMT), a transition from aerial to terrestrial operation that seeks to minimize impulses during impact to the ground which is a quick and simple transition process that exploits BAXTER's resilience to impact.
Autonomous Off-road Navigation over Extreme Terrains with Perceptually-challenging Conditions
Jan 26, 2021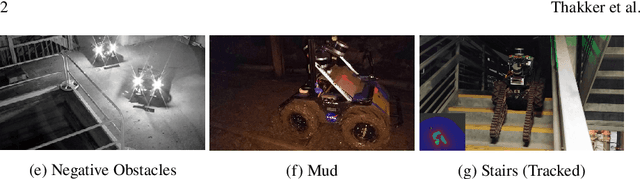
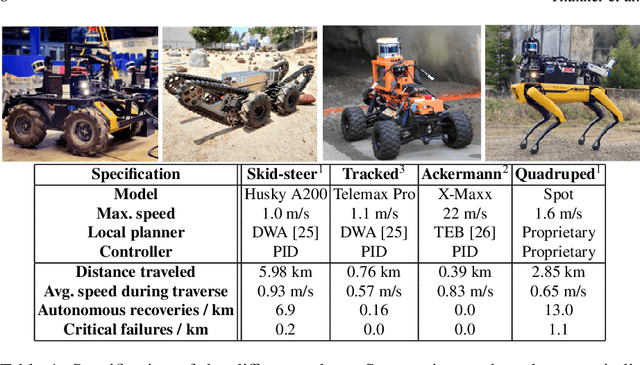
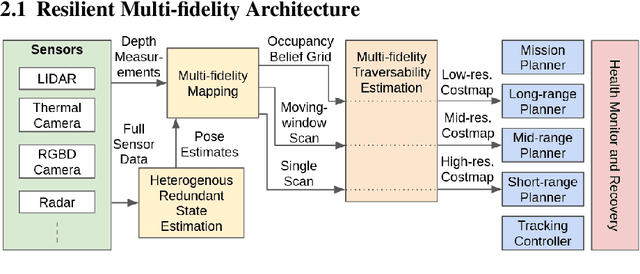
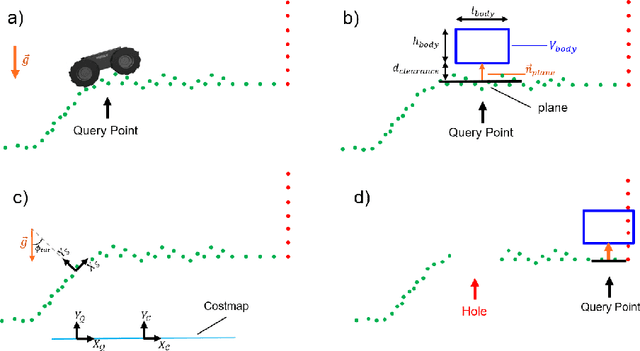
We propose a framework for resilient autonomous navigation in perceptually challenging unknown environments with mobility-stressing elements such as uneven surfaces with rocks and boulders, steep slopes, negative obstacles like cliffs and holes, and narrow passages. Environments are GPS-denied and perceptually-degraded with variable lighting from dark to lit and obscurants (dust, fog, smoke). Lack of prior maps and degraded communication eliminates the possibility of prior or off-board computation or operator intervention. This necessitates real-time on-board computation using noisy sensor data. To address these challenges, we propose a resilient architecture that exploits redundancy and heterogeneity in sensing modalities. Further resilience is achieved by triggering recovery behaviors upon failure. We propose a fast settling algorithm to generate robust multi-fidelity traversability estimates in real-time. The proposed approach was deployed on multiple physical systems including skid-steer and tracked robots, a high-speed RC car and legged robots, as a part of Team CoSTAR's effort to the DARPA Subterranean Challenge, where the team won 2nd and 1st place in the Tunnel and Urban Circuits, respectively.
Unsupervised Monocular Depth Learning with Integrated Intrinsics and Spatio-Temporal Constraints
Nov 02, 2020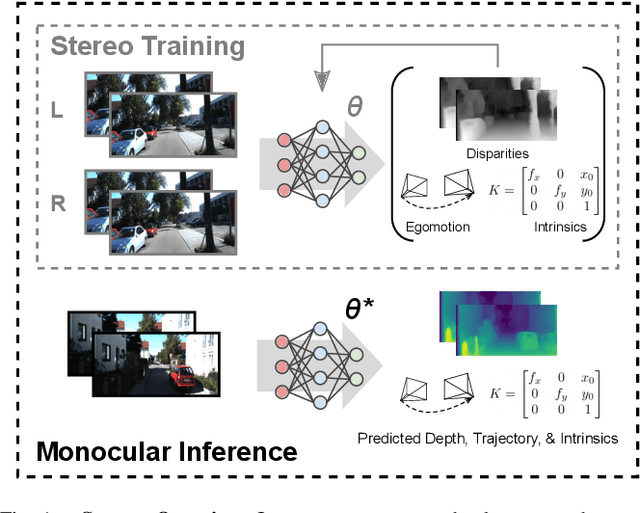
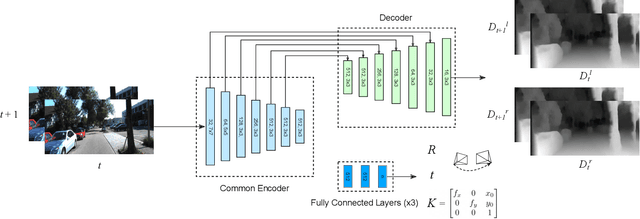
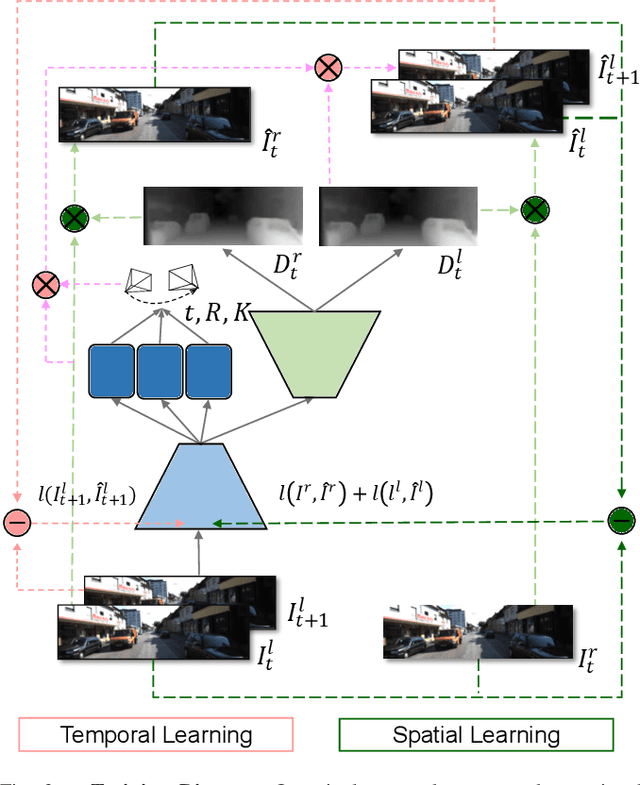

Monocular depth inference has gained tremendous attention from researchers in recent years and remains as a promising replacement for expensive time-of-flight sensors, but issues with scale acquisition and implementation overhead still plague these systems. To this end, this work presents an unsupervised learning framework that is able to predict at-scale depth maps and egomotion, in addition to camera intrinsics, from a sequence of monocular images via a single network. Our method incorporates both spatial and temporal geometric constraints to resolve depth and pose scale factors, which are enforced within the supervisory reconstruction loss functions at training time. Only unlabeled stereo sequences are required for training the weights of our single-network architecture, which reduces overall implementation overhead as compared to previous methods. Our results demonstrate strong performance when compared to the current state-of-the-art on multiple sequences of the KITTI driving dataset.
Autonomous Spot: Long-Range Autonomous Exploration of Extreme Environments with Legged Locomotion
Nov 01, 2020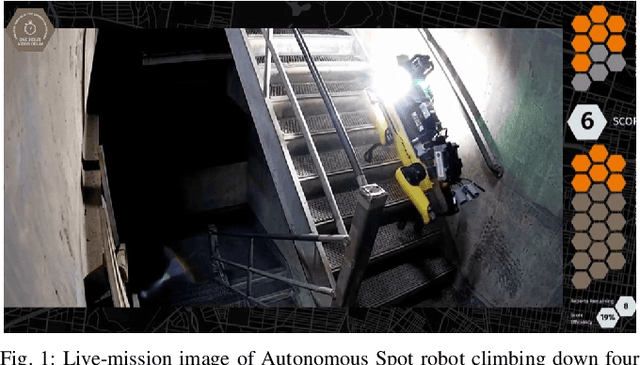
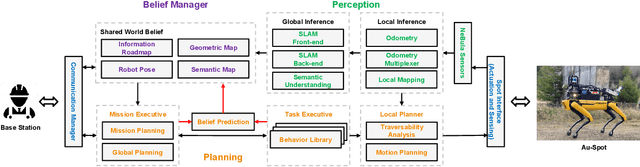
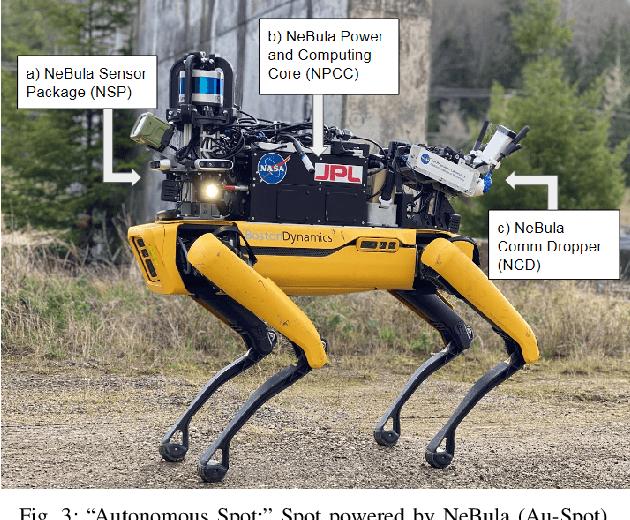
This paper serves as one of the first efforts to enable large-scale and long-duration autonomy using the Boston Dynamics Spot robot. Motivated by exploring extreme environments, particularly those involved in the DARPA Subterranean Challenge, this paper pushes the boundaries of the state-of-practice in enabling legged robotic systems to accomplish real-world complex missions in relevant scenarios. In particular, we discuss the behaviors and capabilities which emerge from the integration of the autonomy architecture NeBula (Networked Belief-aware Perceptual Autonomy) with next-generation mobility systems. We will discuss the hardware and software challenges, and solutions in mobility, perception, autonomy, and very briefly, wireless networking, as well as lessons learned and future directions. We demonstrate the performance of the proposed solutions on physical systems in real-world scenarios.
Unsupervised Deep Persistent Monocular Visual Odometry and Depth Estimation in Extreme Environments
Oct 31, 2020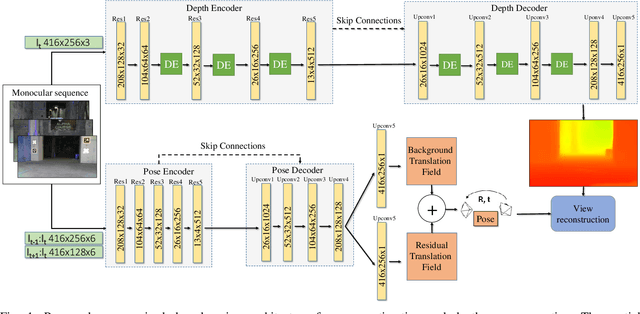
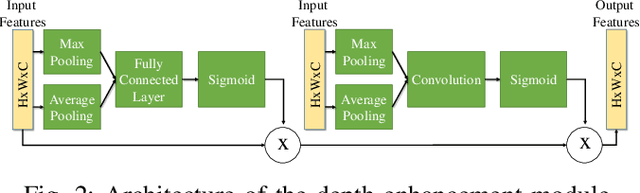
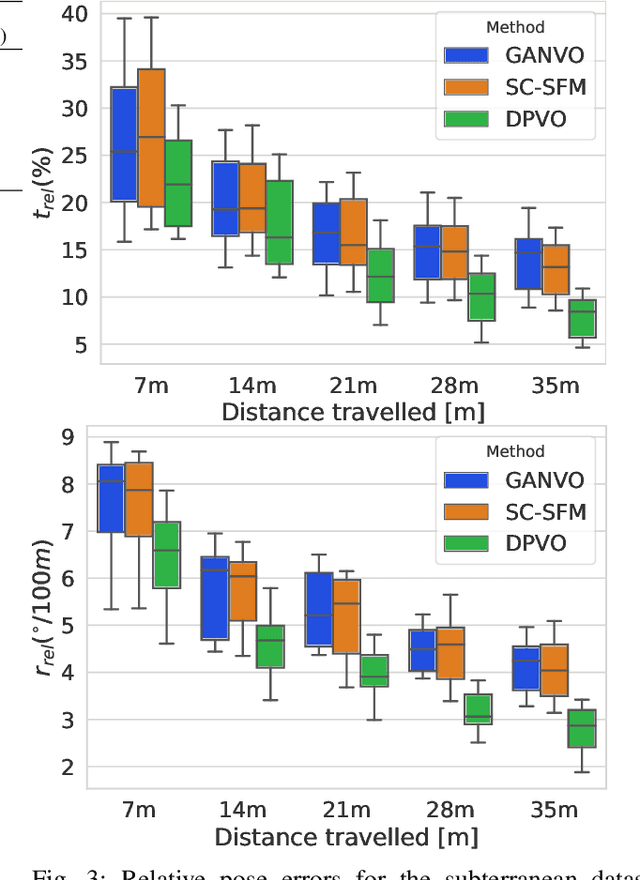
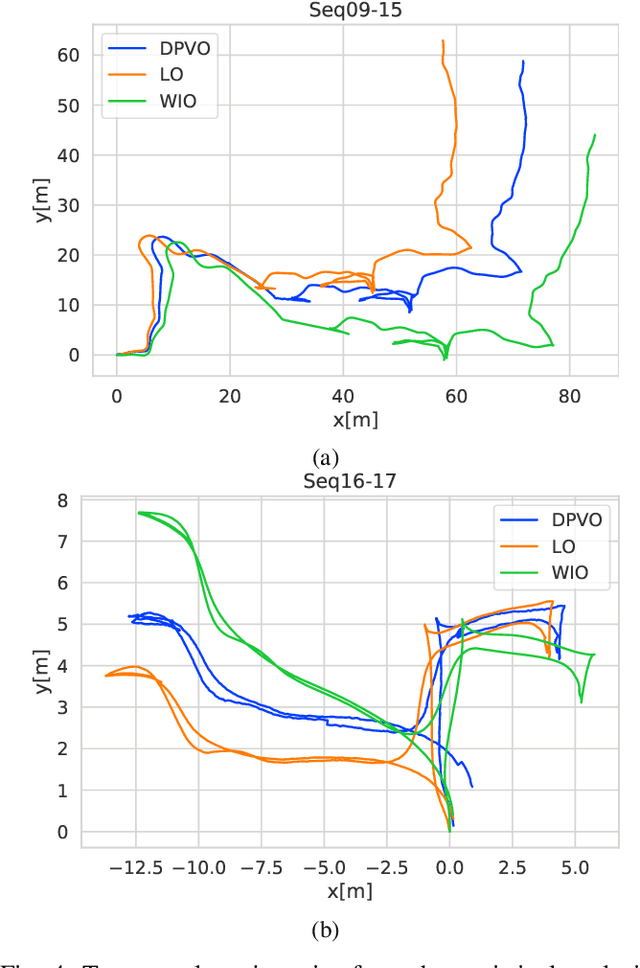
In recent years, unsupervised deep learning approaches have received significant attention to estimate the depth and visual odometry (VO) from unlabelled monocular image sequences. However, their performance is limited in challenging environments due to perceptual degradation, occlusions and rapid motions. Moreover, the existing unsupervised methods suffer from the lack of scale-consistency constraints across frames, which causes that the VO estimators fail to provide persistent trajectories over long sequences. In this study, we propose an unsupervised monocular deep VO framework that predicts six-degrees-of-freedom pose camera motion and depth map of the scene from unlabelled RGB image sequences. We provide detailed quantitative and qualitative evaluations of the proposed framework on a) a challenging dataset collected during the DARPA Subterranean challenge; and b) the benchmark KITTI and Cityscapes datasets. The proposed approach outperforms both traditional and state-of-the-art unsupervised deep VO methods providing better results for both pose estimation and depth recovery. The presented approach is part of the solution used by the COSTAR team participating at the DARPA Subterranean Challenge.
Autonomous Hybrid Ground/Aerial Mobility in Unknown Environments
Sep 11, 2020


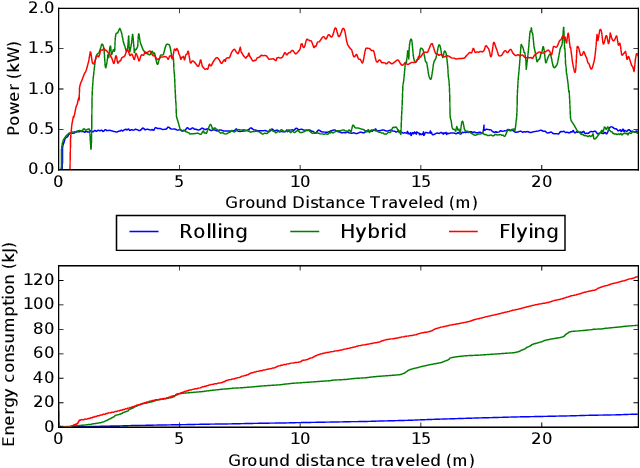
Hybrid ground and aerial vehicles can possess distinct advantages over ground-only or flight-only designs in terms of energy savings and increased mobility. In this work we outline our unified framework for controls, planning, and autonomy of hybrid ground/air vehicles. Our contribution is three-fold: 1) We develop a control scheme for the control of passive two-wheeled hybrid ground/aerial vehicles. 2) We present a unified planner for both rolling and flying by leveraging differential flatness mappings. 3) We conduct experiments leveraging mapping and global planning for hybrid mobility in unknown environments, showing that hybrid mobility uses up to five times less energy than flying only.
Towards Resilient Autonomous Navigation of Drones
Aug 21, 2020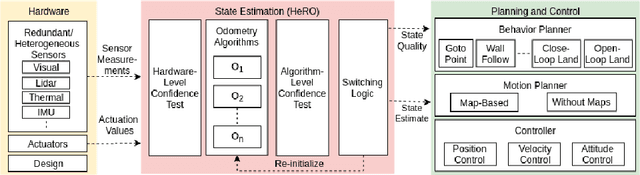
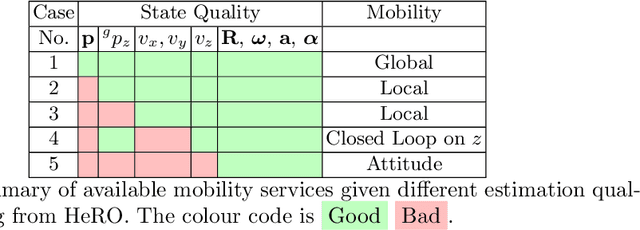
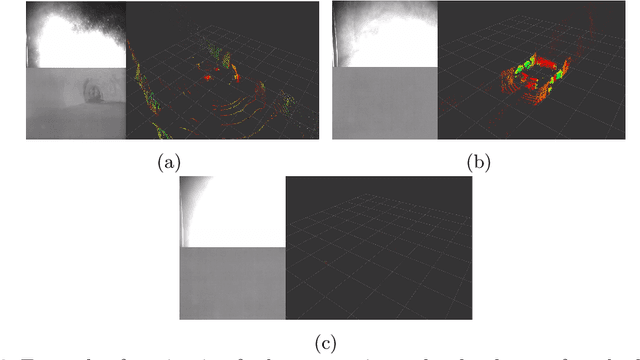
Robots and particularly drones are especially useful in exploring extreme environments that pose hazards to humans. To ensure safe operations in these situations, usually perceptually degraded and without good GNSS, it is critical to have a reliable and robust state estimation solution. The main body of literature in robot state estimation focuses on developing complex algorithms favoring accuracy. Typically, these approaches rely on a strong underlying assumption: the main estimation engine will not fail during operation. In contrast, we propose an architecture that pursues robustness in state estimation by considering redundancy and heterogeneity in both sensing and estimation algorithms. The architecture is designed to expect and detect failures and adapt the behavior of the system to ensure safety. To this end, we present HeRO (Heterogeneous Redundant Odometry): a stack of estimation algorithms running in parallel supervised by a resiliency logic. This logic carries out three main functions: a) perform confidence tests both in data quality and algorithm health; b) re-initialize those algorithms that might be malfunctioning; c) generate a smooth state estimate by multiplexing the inputs based on their quality. The state and quality estimates are used by the guidance and control modules to adapt the mobility behaviors of the system. The validation and utility of the approach are shown with real experiments on a flying robot for the use case of autonomous exploration of subterranean environments, with particular results from the STIX event of the DARPA Subterranean Challenge.
Where to Map? Iterative Rover-Copter Path Planning for Mars Exploration
Aug 17, 2020

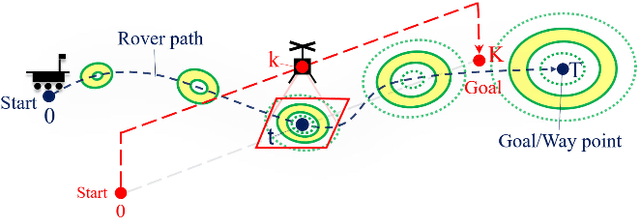
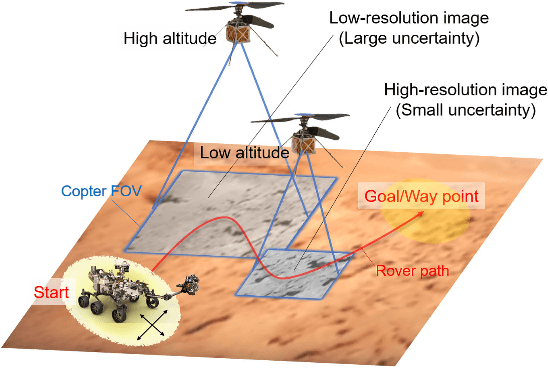
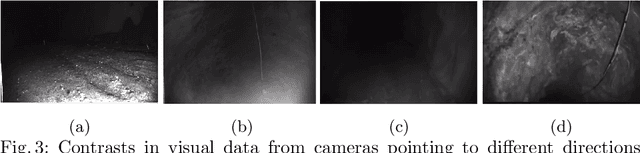
In addition to conventional ground rovers, the Mars 2020 mission will send a helicopter to Mars. The copter's high-resolution data helps the rover to identify small hazards such as steps and pointy rocks, as well as providing rich textual information useful to predict perception performance. In this paper, we consider a three-agent system composed of a Mars rover, copter, and orbiter. The objective is to provide good localization to the rover by selecting an optimal path that minimizes the localization uncertainty accumulation during the rover's traverse. To achieve this goal, we quantify the localizability as a goodness measure associated with the map, and conduct a joint-space search over rover's path and copter's perceptual actions given prior information from the orbiter. We jointly address where to map by the copter and where to drive by the rover using the proposed iterative copter-rover path planner. We conducted numerical simulations using the map of Mars 2020 landing site to demonstrate the effectiveness of the proposed planner.
* 8 pages, 7 figures
Nonlinear MPC for Collision Avoidance and Controlof UAVs With Dynamic Obstacles
Aug 03, 2020



This article proposes a Novel Nonlinear Model Predictive Control (NMPC) for navigation and obstacle avoidance of an Unmanned Aerial Vehicle (UAV). The proposed NMPC formulation allows for a fully parametric obstacle trajectory, while in this article we apply a classification scheme to differentiate between different kinds of trajectories to predict future obstacle positions. The trajectory calculation is done from an initial condition, and fed to the NMPC as an additional input. The solver used is the nonlinear, non-convex solver Proximal Averaged Newton for Optimal Control (PANOC) and its associated software OpEn (Optimization Engine), in which we apply a penalty method to properly consider the obstacles and other constraints during navigation. The proposed NMPC scheme allows for real-time solutions using a sampling time of 50 ms and a two second prediction of both the obstacle trajectory and the NMPC problem, which implies that the scheme can be considered as a local path-planner. This paper will present the NMPC cost function and constraint formulation, as well as the methodology of dealing with the dynamic obstacles. We include multiple laboratory experiments to demonstrate the efficacy of the proposed control architecture, and to show that the proposed method delivers fast and computationally stable solutions to the dynamic obstacle avoidance scenarios.
* 8 pages, 10 figures