 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Online Adaptation to Label Distribution Shift
Jul 09, 2021


Machine learning models often encounter distribution shifts when deployed in the real world. In this paper, we focus on adaptation to label distribution shift in the online setting, where the test-time label distribution is continually changing and the model must dynamically adapt to it without observing the true label. Leveraging a novel analysis, we show that the lack of true label does not hinder estimation of the expected test loss, which enables the reduction of online label shift adaptation to conventional online learning. Informed by this observation, we propose adaptation algorithms inspired by classical online learning techniques such as Follow The Leader (FTL) and Online Gradient Descent (OGD) and derive their regret bounds. We empirically verify our findings under both simulated and real world label distribution shifts and show that OGD is particularly effective and robust to a variety of challenging label shift scenarios.
T-RECS: A Simulation Tool to Study the Societal Impact of Recommender Systems
Jul 28, 2021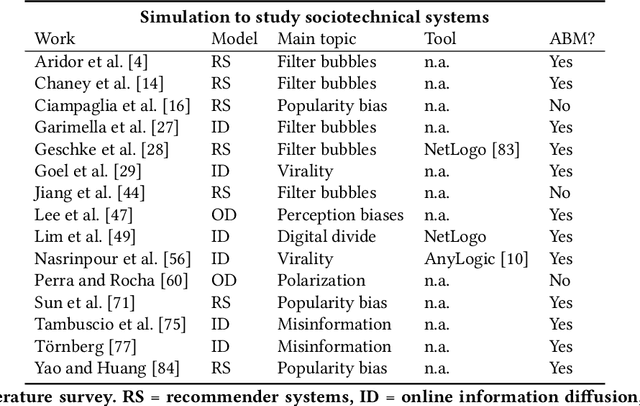
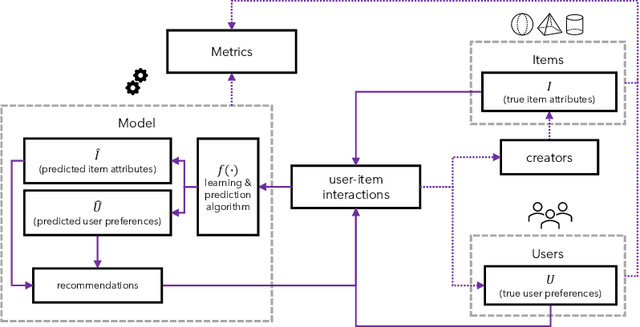
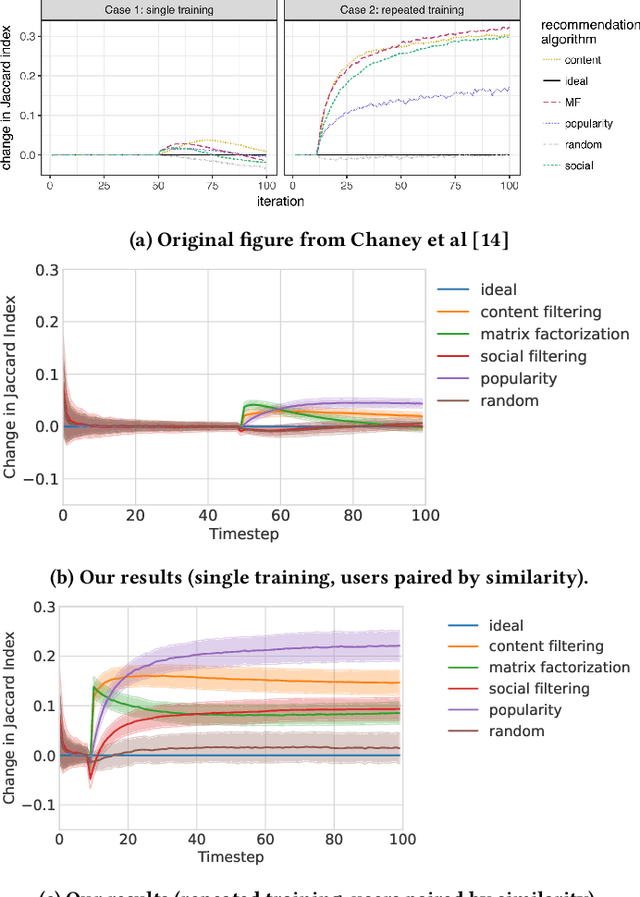
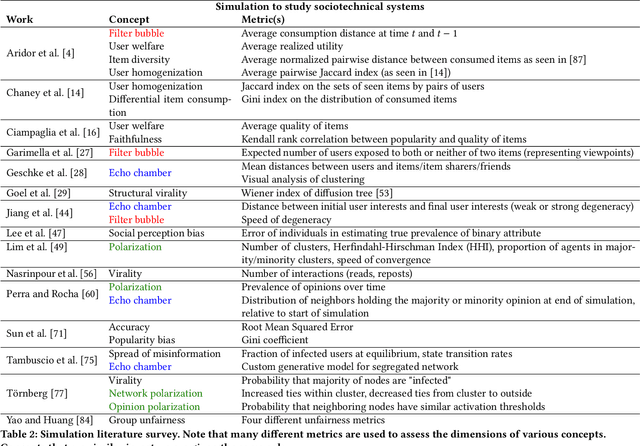
Simulation has emerged as a popular method to study the long-term societal consequences of recommender systems. This approach allows researchers to specify their theoretical model explicitly and observe the evolution of system-level outcomes over time. However, performing simulation-based studies often requires researchers to build their own simulation environments from the ground up, which creates a high barrier to entry, introduces room for implementation error, and makes it difficult to disentangle whether observed outcomes are due to the model or the implementation. We introduce T-RECS, an open-sourced Python package designed for researchers to simulate recommendation systems and other types of sociotechnical systems in which an algorithm mediates the interactions between multiple stakeholders, such as users and content creators. To demonstrate the flexibility of T-RECS, we perform a replication of two prior simulation-based research on sociotechnical systems. We additionally show how T-RECS can be used to generate novel insights with minimal overhead. Our tool promotes reproducibility in this area of research, provides a unified language for simulating sociotechnical systems, and removes the friction of implementing simulations from scratch.
MutualEyeContact: A conversation analysis tool with focus on eye contact
Jul 09, 2021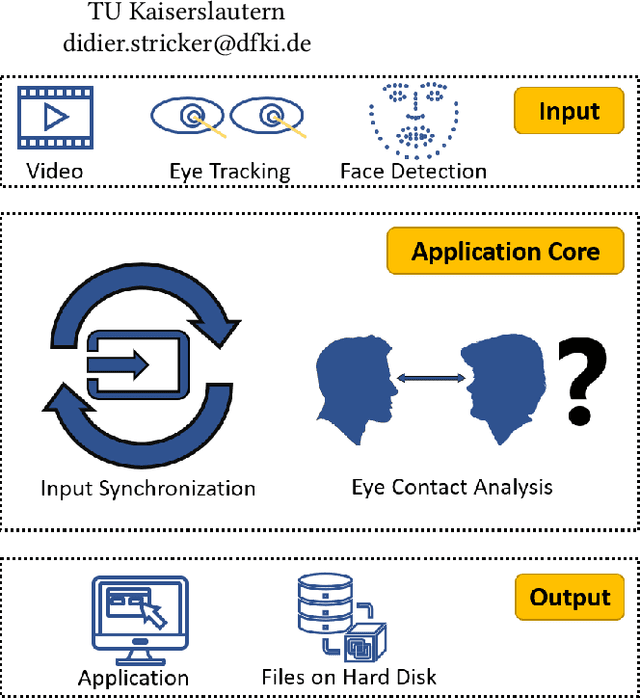
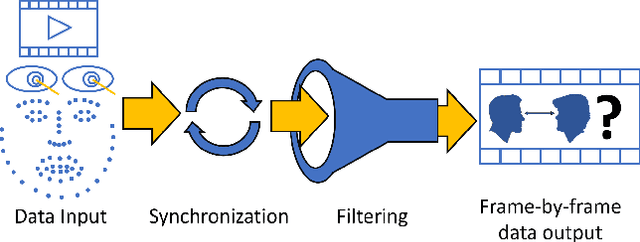

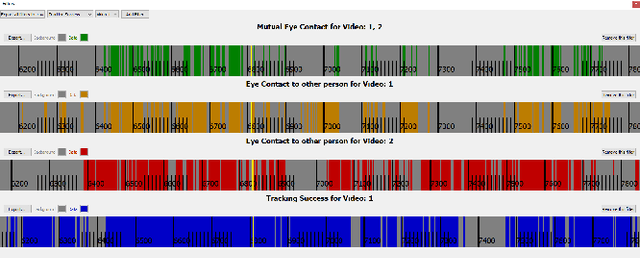
Eye contact between individuals is particularly important for understanding human behaviour. To further investigate the importance of eye contact in social interactions, portable eye tracking technology seems to be a natural choice. However, the analysis of available data can become quite complex. Scientists need data that is calculated quickly and accurately. Additionally, the relevant data must be automatically separated to save time. In this work, we propose a tool called MutualEyeContact which excels in those tasks and can help scientists to understand the importance of (mutual) eye contact in social interactions. We combine state-of-the-art eye tracking with face recognition based on machine learning and provide a tool for analysis and visualization of social interaction sessions. This work is a joint collaboration of computer scientists and cognitive scientists. It combines the fields of social and behavioural science with computer vision and deep learning.
Design and Experimental Evaluation of a Hierarchical Controller for an Autonomous Ground Vehicle with Large Uncertainties
Aug 09, 2021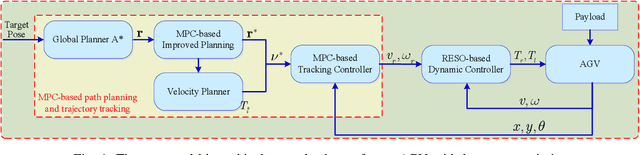
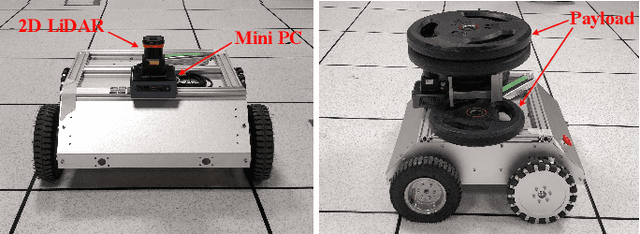
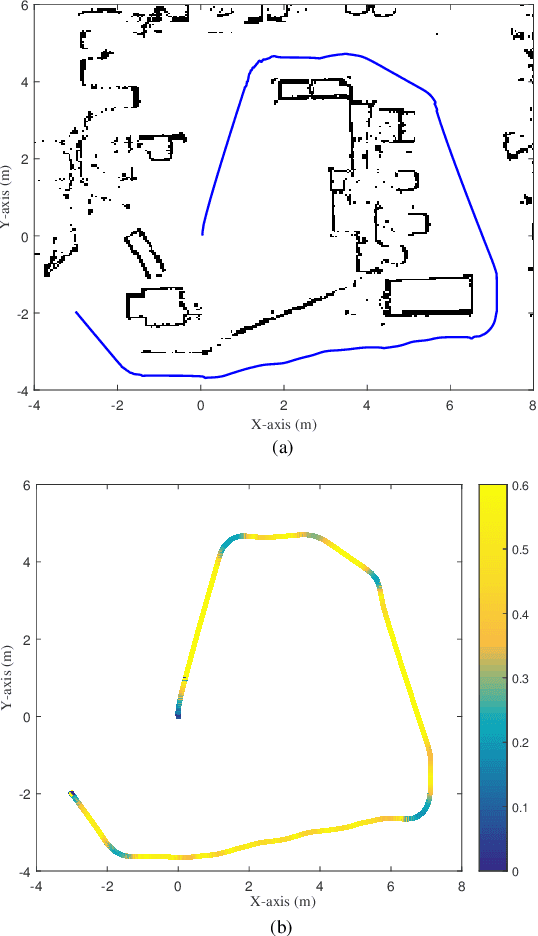
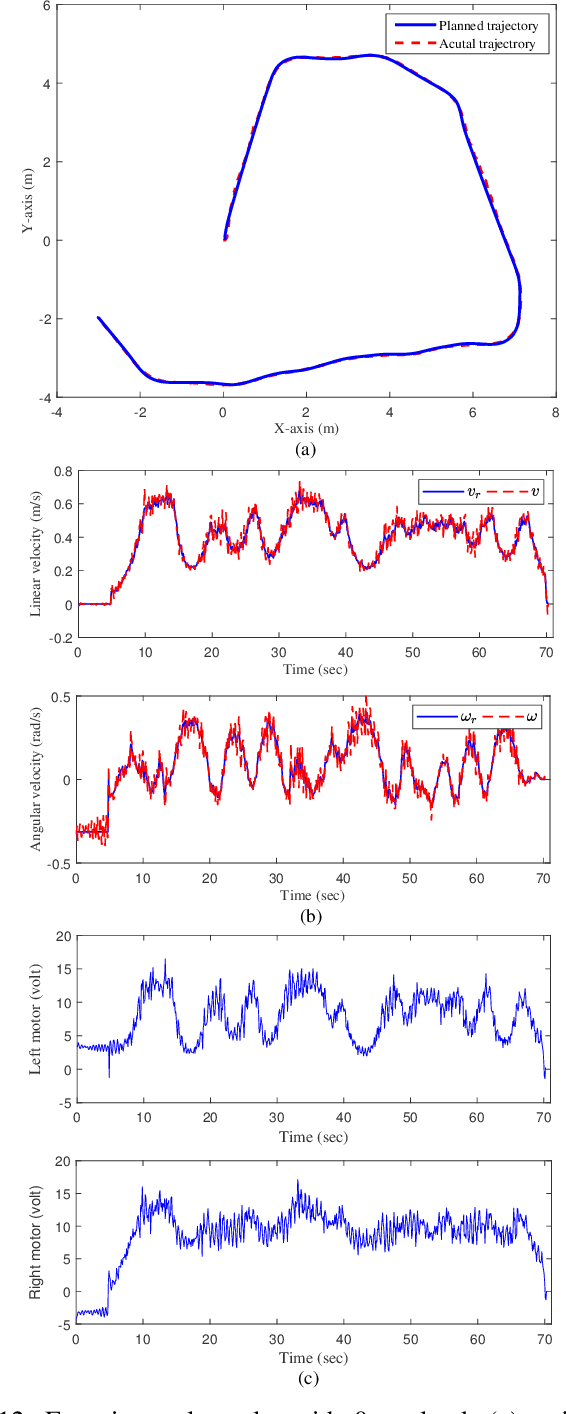
Autonomous ground vehicles (AGVs) are receiving increasing attention, and the motion planning and control problem for these vehicles has become a hot research topic. In real applications such as material handling, an AGV is subject to large uncertainties and its motion planning and control become challenging. In this paper, we investigate this problem by proposing a hierarchical control scheme, which is integrated by a model predictive control (MPC) based path planning and trajectory tracking control at the high level, and a reduced-order extended state observer (RESO) based dynamic control at the low level. The control at the high level consists of an MPC-based improved path planner, a velocity planner, and an MPC-based tracking controller. Both the path planning and trajectory tracking control problems are formulated under an MPC framework. The control at the low level employs the idea of active disturbance rejection control (ADRC). The uncertainties are estimated via a RESO and then compensated in the control in real-time. We show that, for the first-order uncertain AGV dynamic model, the RESO-based control only needs to know the control direction. Finally, simulations and experiments on an AGV with different payloads are conducted. The results illustrate that the proposed hierarchical control scheme achieves satisfactory motion planning and control performance with large uncertainties.
VolMap: A Real-time Model for Semantic Segmentation of a LiDAR surrounding view
Jun 12, 2019



This paper introduces VolMap, a real-time approach for the semantic segmentation of a 3D LiDAR surrounding view system in autonomous vehicles. We designed an optimized deep convolution neural network that can accurately segment the point cloud produced by a 360\degree{} LiDAR setup, where the input consists of a volumetric bird-eye view with LiDAR height layers used as input channels. We further investigated the usage of multi-LiDAR setup and its effect on the performance of the semantic segmentation task. Our evaluations are carried out on a large scale 3D object detection benchmark containing a LiDAR cocoon setup, along with KITTI dataset, where the per-point segmentation labels are derived from 3D bounding boxes. We show that VolMap achieved an excellent balance between high accuracy and real-time running on CPU.
Heuristic and Metaheuristic Methods for the Unrelated Machines Scheduling Problem: A Survey
Jul 27, 2021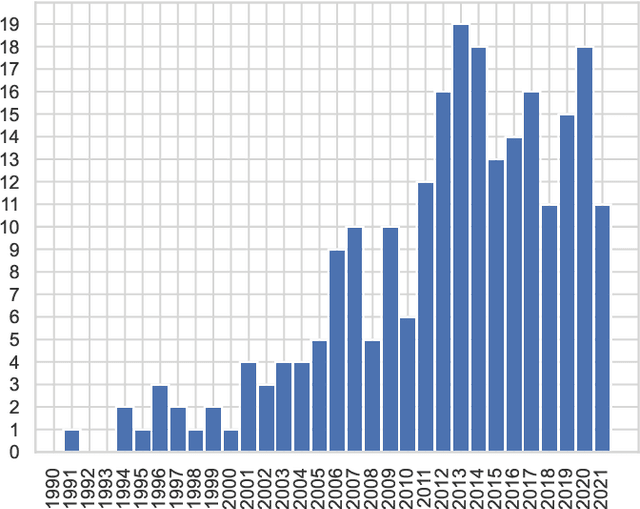
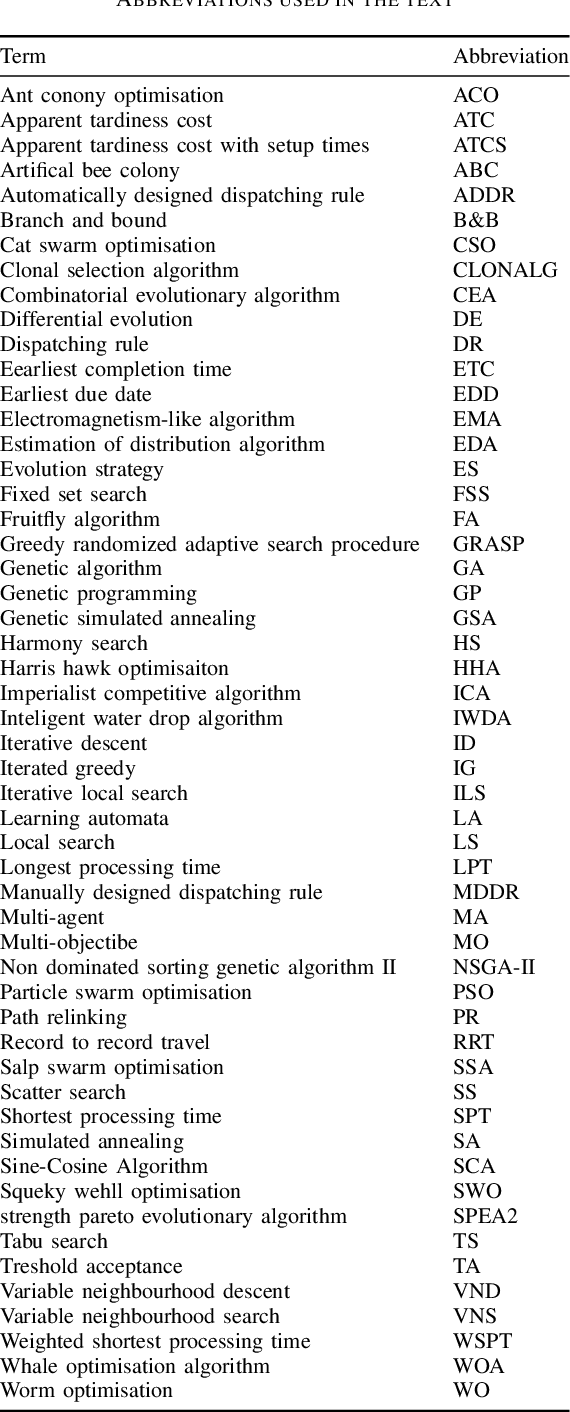
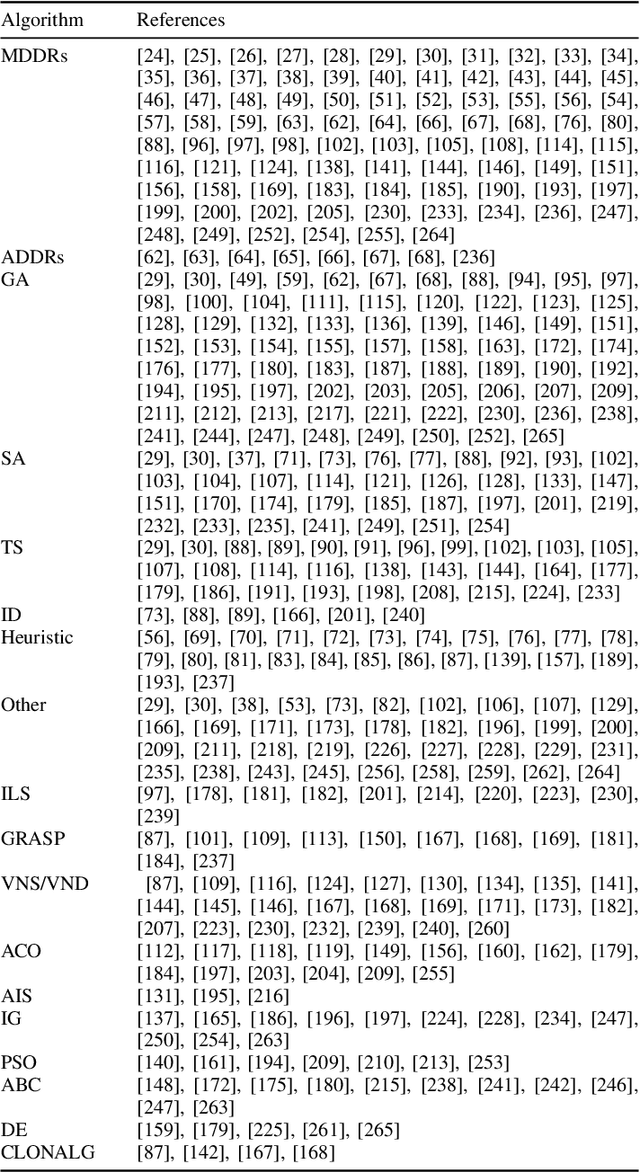
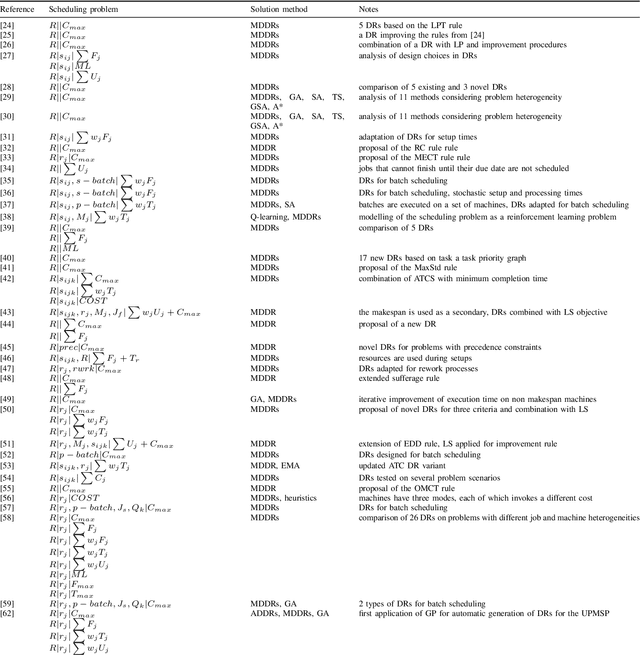
Today scheduling problems have an immense effect on various areas of human lives, be it from their application in manufacturing and production industry, transportation, or workforce allocation. The unrelated parallel machines scheduling problem (UPMSP), which is only one of the many different problem types that exist, found its application in many areas like production industries or distributed computing. Due to the complexity of the problem, heuristic and metaheuristic methods are gaining more attention for solving it. Although this problem variant did not receive much attention as other models, recent years saw the increase of research dealing with this problem. During that time, many different problem variants, solution methods, or other interesting research directions were considered. However, no study has until now tried to systematise the research in which heuristic methods are applied for the UPMSP. The goal of this study is to provide an extensive literature review on the application of heuristic and metaheuristic methods for solving the UPMSP. The research was systematised and classified into several categories to enable an easy overview of the different problem and solution variants. Additionally, current trends and possible future research directions are also shortly outlined.
Value Function is All You Need: A Unified Learning Framework for Ride Hailing Platforms
Jun 04, 2021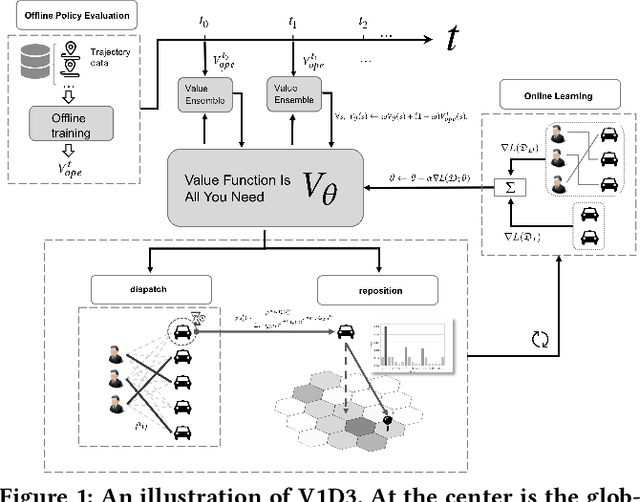
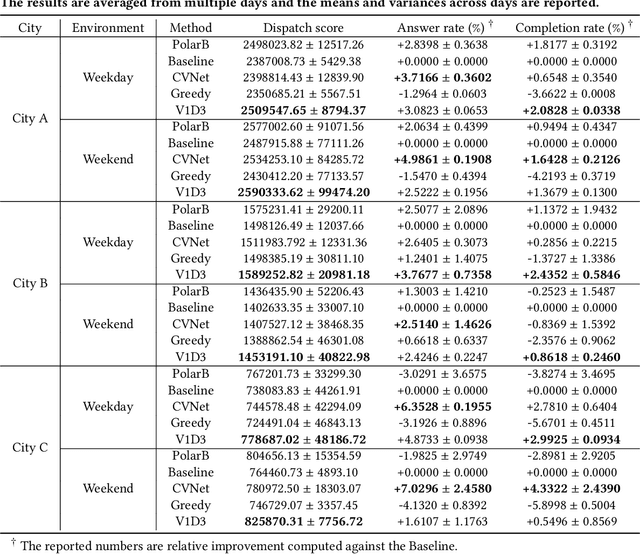
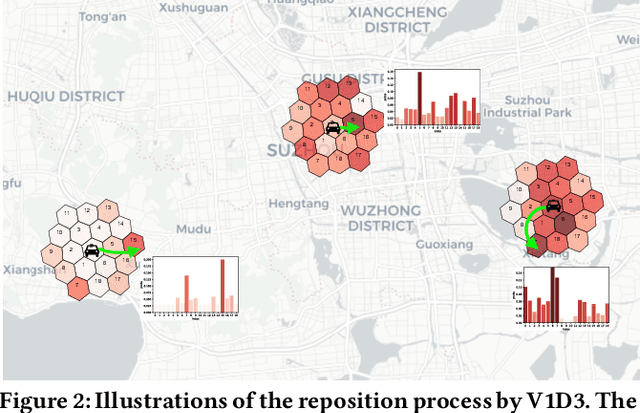
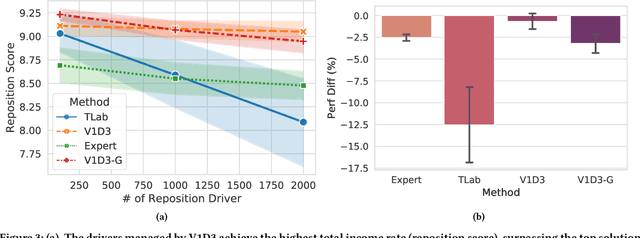
Large ride-hailing platforms, such as DiDi, Uber and Lyft, connect tens of thousands of vehicles in a city to millions of ride demands throughout the day, providing great promises for improving transportation efficiency through the tasks of order dispatching and vehicle repositioning. Existing studies, however, usually consider the two tasks in simplified settings that hardly address the complex interactions between the two, the real-time fluctuations between supply and demand, and the necessary coordinations due to the large-scale nature of the problem. In this paper we propose a unified value-based dynamic learning framework (V1D3) for tackling both tasks. At the center of the framework is a globally shared value function that is updated continuously using online experiences generated from real-time platform transactions. To improve the sample-efficiency and the robustness, we further propose a novel periodic ensemble method combining the fast online learning with a large-scale offline training scheme that leverages the abundant historical driver trajectory data. This allows the proposed framework to adapt quickly to the highly dynamic environment, to generalize robustly to recurrent patterns and to drive implicit coordinations among the population of managed vehicles. Extensive experiments based on real-world datasets show considerably improvements over other recently proposed methods on both tasks. Particularly, V1D3 outperforms the first prize winners of both dispatching and repositioning tracks in the KDD Cup 2020 RL competition, achieving state-of-the-art results on improving both total driver income and user experience related metrics.
Random Warping Series: A Random Features Method for Time-Series Embedding
Sep 14, 2018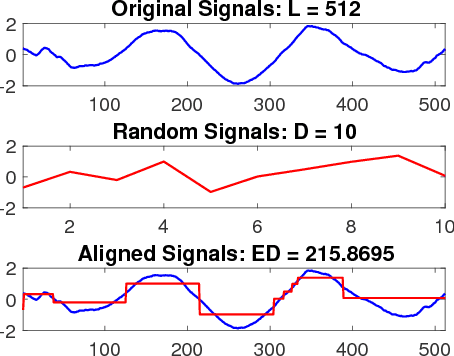
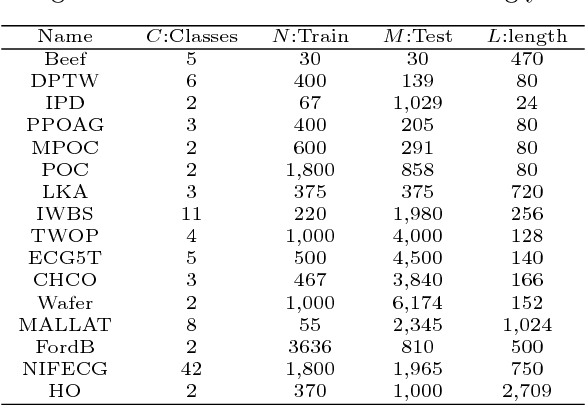
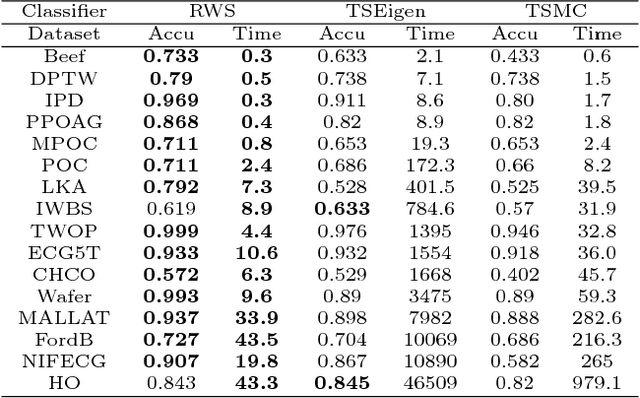
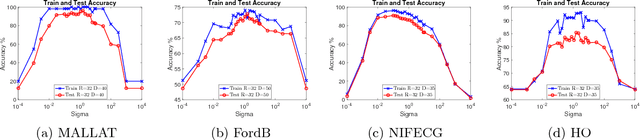
Time series data analytics has been a problem of substantial interests for decades, and Dynamic Time Warping (DTW) has been the most widely adopted technique to measure dissimilarity between time series. A number of global-alignment kernels have since been proposed in the spirit of DTW to extend its use to kernel-based estimation method such as support vector machine. However, those kernels suffer from diagonal dominance of the Gram matrix and a quadratic complexity w.r.t. the sample size. In this work, we study a family of alignment-aware positive definite (p.d.) kernels, with its feature embedding given by a distribution of \emph{Random Warping Series (RWS)}. The proposed kernel does not suffer from the issue of diagonal dominance while naturally enjoys a \emph{Random Features} (RF) approximation, which reduces the computational complexity of existing DTW-based techniques from quadratic to linear in terms of both the number and the length of time-series. We also study the convergence of the RF approximation for the domain of time series of unbounded length. Our extensive experiments on 16 benchmark datasets demonstrate that RWS outperforms or matches state-of-the-art classification and clustering methods in both accuracy and computational time. Our code and data is available at { \url{https://github.com/IBM/RandomWarpingSeries}}.
Domain-specific Genetic Algorithm for Multi-tenant DNNAccelerator Scheduling
Apr 30, 2021



As Deep Learning continues to drive a variety of applications in datacenters and HPC, there is a growing trend towards building large accelerators with several sub-accelerator cores/chiplets. This work looks at the problem of supporting multi-tenancy on such accelerators. In particular, we focus on the problem of mapping layers from several DNNs simultaneously on an accelerator. Given the extremely large search space, we formulate the search as an optimization problem and develop a specialized genetic algorithm called G# withcustom operators to enable structured sample-efficient exploration. We quantitatively compare G# with several common heuristics, state-of-the-art optimization methods, and reinforcement learning methods across different accelerator set-tings (large/small accelerators) and different sub-accelerator configurations (homogeneous/heterogeneous), and observeG# can consistently find better solutions. Further, to enable real-time scheduling, we also demonstrate a method to generalize the learnt schedules and transfer them to the next batch of jobs, reducing schedule compute time to near zero.
Focusing on Persons: Colorizing Old Images Learning from Modern Historical Movies
Aug 14, 2021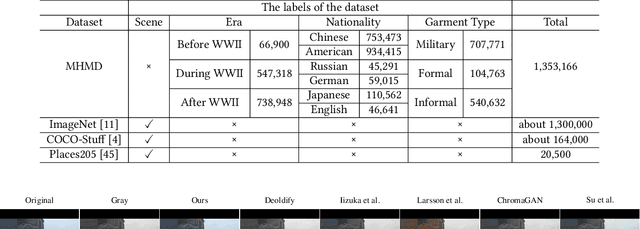
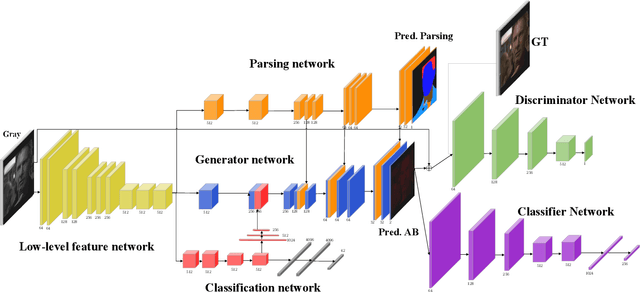
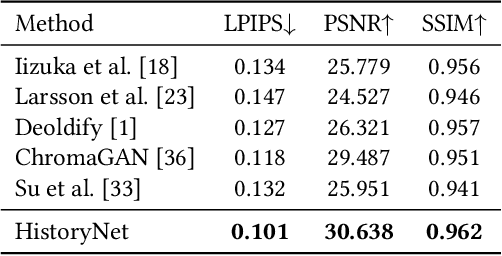
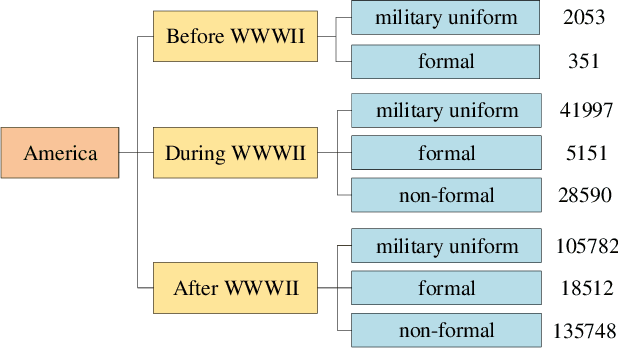
In industry, there exist plenty of scenarios where old gray photos need to be automatically colored, such as video sites and archives. In this paper, we present the HistoryNet focusing on historical person's diverse high fidelity clothing colorization based on fine grained semantic understanding and prior. Colorization of historical persons is realistic and practical, however, existing methods do not perform well in the regards. In this paper, a HistoryNet including three parts, namely, classification, fine grained semantic parsing and colorization, is proposed. Classification sub-module supplies classifying of images according to the eras, nationalities and garment types; Parsing sub-network supplies the semantic for person contours, clothing and background in the image to achieve more accurate colorization of clothes and persons and prevent color overflow. In the training process, we integrate classification and semantic parsing features into the coloring generation network to improve colorization. Through the design of classification and parsing subnetwork, the accuracy of image colorization can be improved and the boundary of each part of image can be more clearly. Moreover, we also propose a novel Modern Historical Movies Dataset (MHMD) containing 1,353,166 images and 42 labels of eras, nationalities, and garment types for automatic colorization from 147 historical movies or TV series made in modern time. Various quantitative and qualitative comparisons demonstrate that our method outperforms the state-of-the-art colorization methods, especially on military uniforms, which has correct colors according to the historical literatures.