 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantized Consensus under Data-Rate Constraints and DoS Attacks: A Zooming-In and Holding Approach
Jul 18, 2022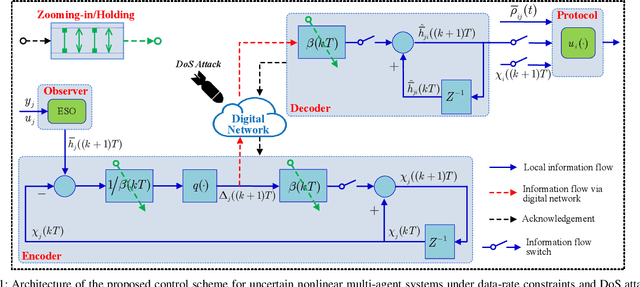
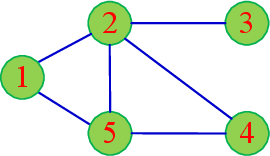
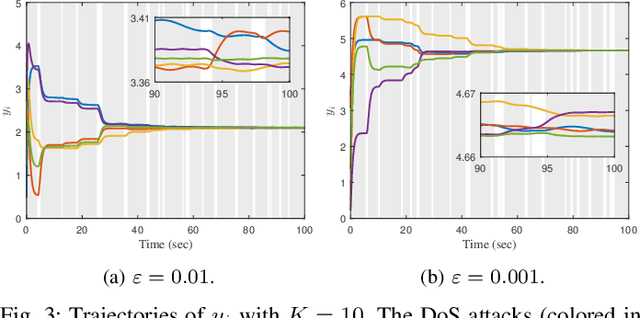
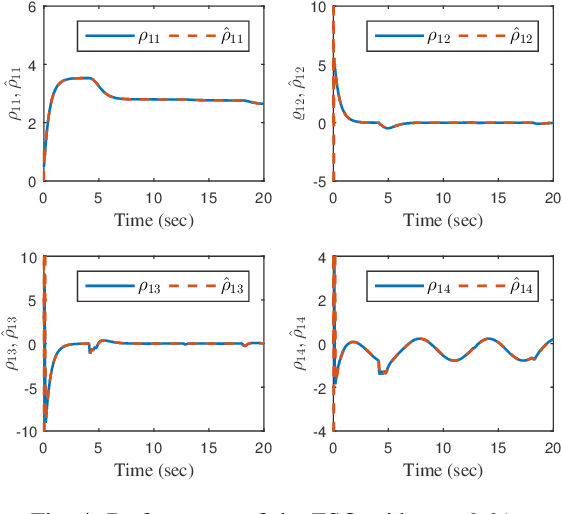
This paper is concerned with the quantized consensus problem for uncertain nonlinear multi-agent systems under data-rate constraints and Denial-of-Service (DoS) attacks. The agents are modeled in strict-feedback form with unknown nonlinear dynamics and external disturbance. Extended state observers (ESOs) are leveraged to estimate agents' total uncertainties along with their states. To mitigate the effects of DoS attacks, a novel dynamic quantization with zooming-in and holding capabilities is proposed. The idea is to zoom-in and hold the variable to be quantized if the system is in the absence and presence of DoS attacks, respectively. The control protocol is given in terms of the outputs of the ESOs and the dynamic-quantization-based encoders and decoders. We show that, for a connected undirected network, the developed control protocol is capable of handling any DoS attacks inducing bounded consecutive packet losses with merely 3-level quantization. The application of the zooming-in and holding approach to known linear multi-agent systems is also discussed.
Design and Experimental Evaluation of a Hierarchical Controller for an Autonomous Ground Vehicle with Large Uncertainties
Aug 09, 2021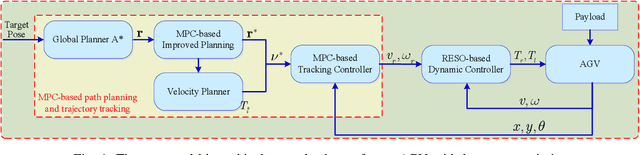
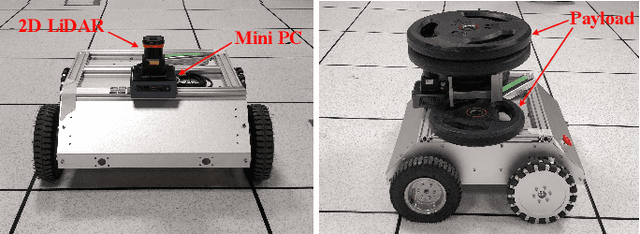
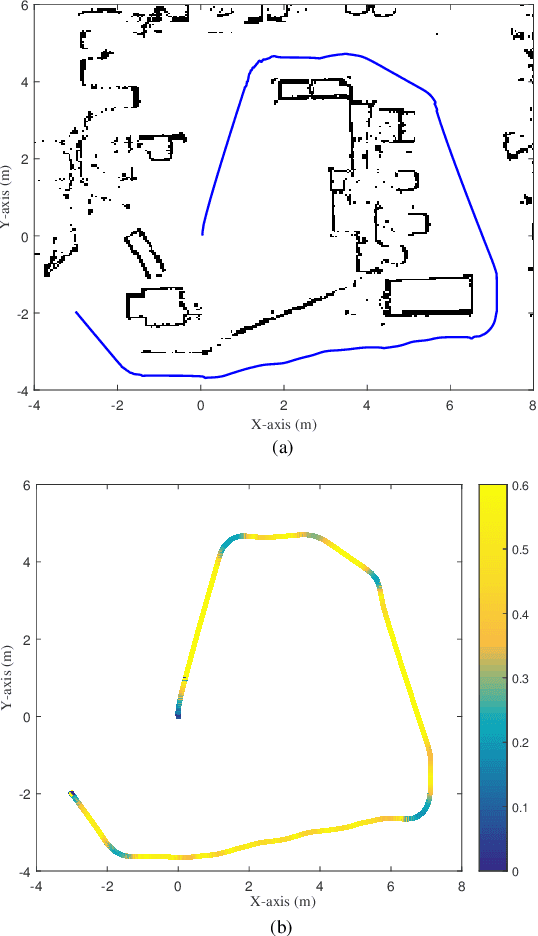
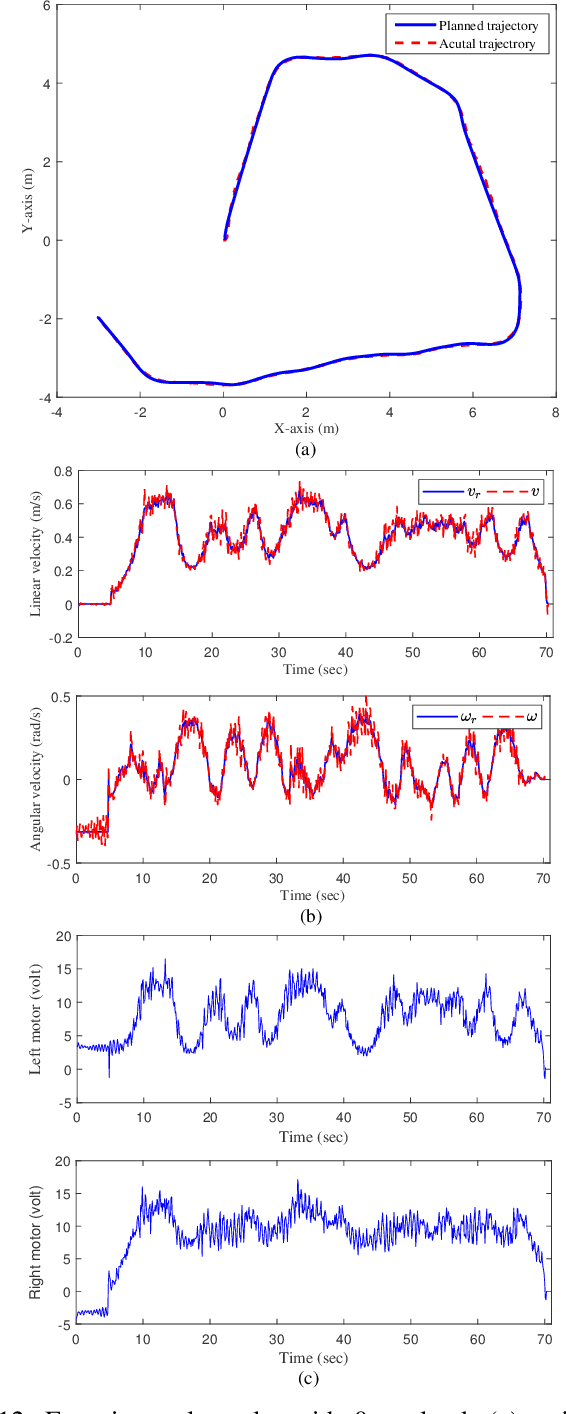
Autonomous ground vehicles (AGVs) are receiving increasing attention, and the motion planning and control problem for these vehicles has become a hot research topic. In real applications such as material handling, an AGV is subject to large uncertainties and its motion planning and control become challenging. In this paper, we investigate this problem by proposing a hierarchical control scheme, which is integrated by a model predictive control (MPC) based path planning and trajectory tracking control at the high level, and a reduced-order extended state observer (RESO) based dynamic control at the low level. The control at the high level consists of an MPC-based improved path planner, a velocity planner, and an MPC-based tracking controller. Both the path planning and trajectory tracking control problems are formulated under an MPC framework. The control at the low level employs the idea of active disturbance rejection control (ADRC). The uncertainties are estimated via a RESO and then compensated in the control in real-time. We show that, for the first-order uncertain AGV dynamic model, the RESO-based control only needs to know the control direction. Finally, simulations and experiments on an AGV with different payloads are conducted. The results illustrate that the proposed hierarchical control scheme achieves satisfactory motion planning and control performance with large uncertainties.
Efficient Trajectory Planning for Multiple Non-holonomic Mobile Robots via Prioritized Trajectory Optimization
Dec 15, 2020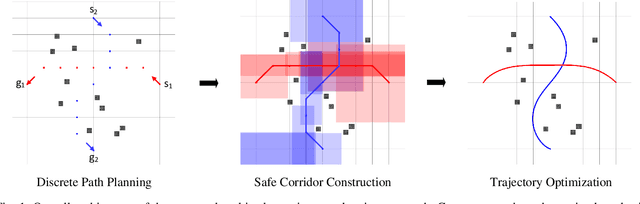
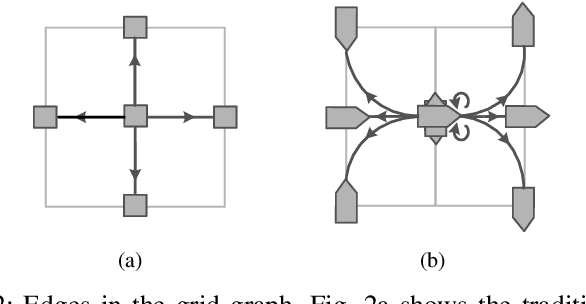
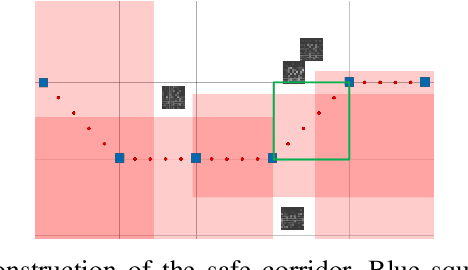
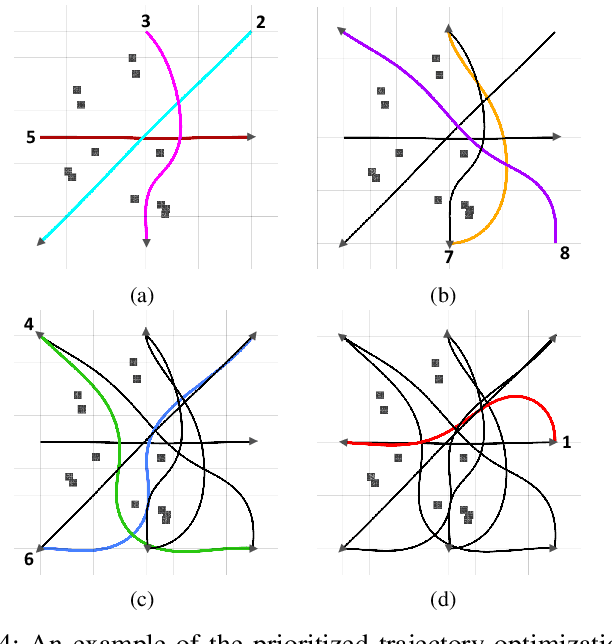
In this paper, we present a novel approach to efficiently generate collision-free optimal trajectories for multiple non-holonomic mobile robots in obstacle-rich environments. Our approach first employs a graph-based multi-agent path planner to find an initial discrete solution, and then refines this solution into smooth trajectories using nonlinear optimization. We divide the robot team into small groups and propose a prioritized trajectory optimization method to improve the scalability of the algorithm. Infeasible sub-problems may arise in some scenarios because of the decoupled optimization framework. To handle this problem, a novel grouping and priority assignment strategy is developed to increase the probability of finding feasible trajectories. Compared to the coupled trajectory optimization, the proposed approach reduces the computation time considerably with a small impact on the optimality of the plans. Simulations and hardware experiments verified the effectiveness and superiority of the proposed approach.
Fast Loop Closure Detection via Binary Content
Feb 25, 2020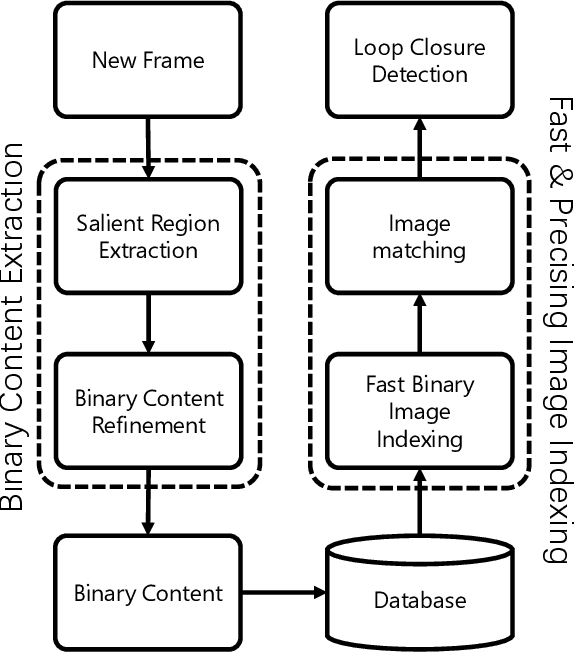

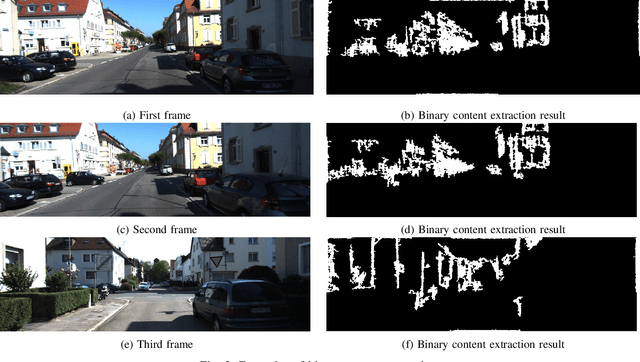

Loop closure detection plays an important role in reducing localization drift in Simultaneous Localization And Mapping (SLAM). It aims to find repetitive scenes from historical data to reset localization. To tackle the loop closure problem, existing methods often leverage on the matching of visual features, which achieve good accuracy but require high computational resources. However, feature point based methods ignore the patterns of image, i.e., the shape of the objects as well as the distribution of objects in an image. It is believed that this information is usually unique for a scene and can be utilized to improve the performance of traditional loop closure detection methods. In this paper we leverage and compress the information into a binary image to accelerate an existing fast loop closure detection method via binary content. The proposed method can greatly reduce the computational cost without sacrificing recall rate. It consists of three parts: binary content construction, fast image retrieval and precise loop closure detection. No offline training is required. Our method is compared with the state-of-the-art loop closure detection methods and the results show that it outperforms the traditional methods at both recall rate and speed.