 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuffer Matters: Unleashing the Power of Off-Policy Reinforcement Learning in Large Language Model Reasoning
Feb 24, 2026Traditional on-policy Reinforcement Learning with Verifiable Rewards (RLVR) frameworks suffer from experience waste and reward homogeneity, which directly hinders learning efficiency on difficult samples during large language models post-training. In this paper, we introduce Batch Adaptation Policy Optimization (BAPO), an off-policy RLVR framework to improve the data efficiency in large language models post-training. It dynamically selects training batches by re-evaluating historically difficult samples and reusing high-quality ones, while holding a lower bound guarantee for policy improvement. Extensive experiments further demonstrate that BAPO achieves an average 12.5% improvement over GRPO across mathematics, planning, and visual reasoning tasks. Crucially, BAPO successfully resolves 40.7% of problems that base models consistently fail to solve.
Astra: Toward General-Purpose Mobile Robots via Hierarchical Multimodal Learning
Jun 06, 2025Modern robot navigation systems encounter difficulties in diverse and complex indoor environments. Traditional approaches rely on multiple modules with small models or rule-based systems and thus lack adaptability to new environments. To address this, we developed Astra, a comprehensive dual-model architecture, Astra-Global and Astra-Local, for mobile robot navigation. Astra-Global, a multimodal LLM, processes vision and language inputs to perform self and goal localization using a hybrid topological-semantic graph as the global map, and outperforms traditional visual place recognition methods. Astra-Local, a multitask network, handles local path planning and odometry estimation. Its 4D spatial-temporal encoder, trained through self-supervised learning, generates robust 4D features for downstream tasks. The planning head utilizes flow matching and a novel masked ESDF loss to minimize collision risks for generating local trajectories, and the odometry head integrates multi-sensor inputs via a transformer encoder to predict the relative pose of the robot. Deployed on real in-house mobile robots, Astra achieves high end-to-end mission success rate across diverse indoor environments.
Value Function is All You Need: A Unified Learning Framework for Ride Hailing Platforms
Jun 04, 2021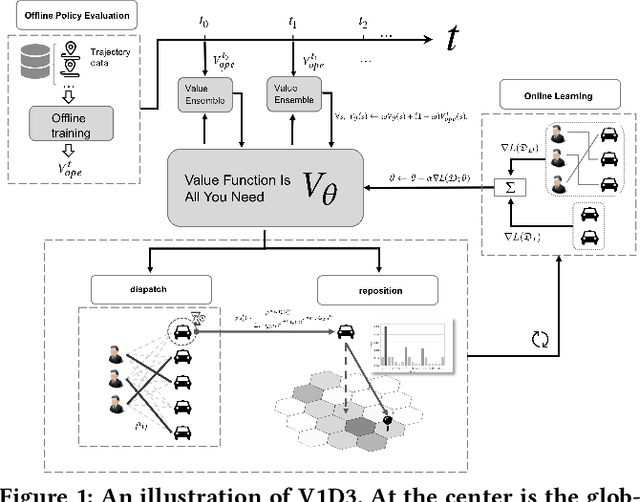
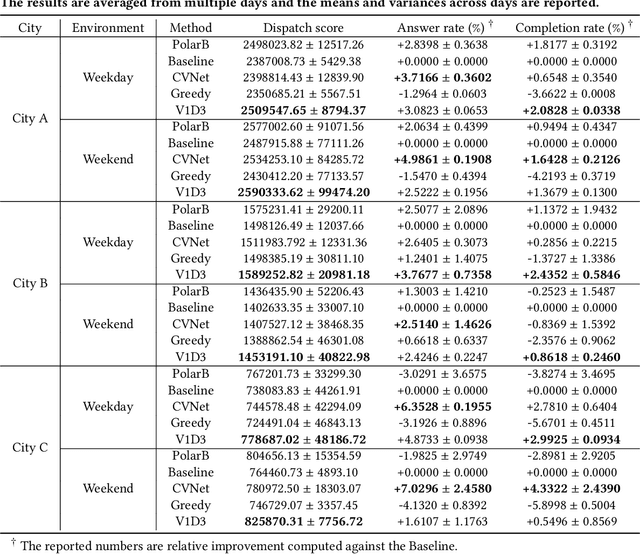
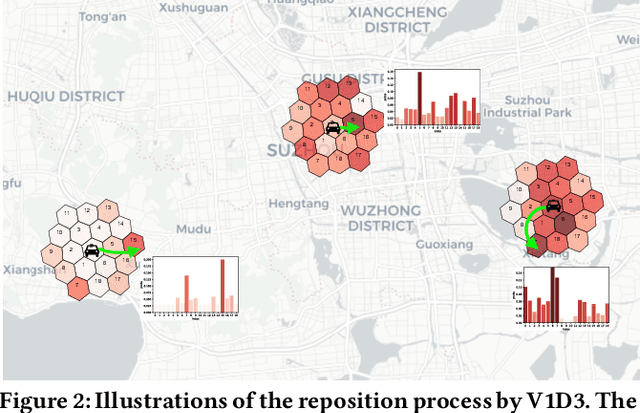
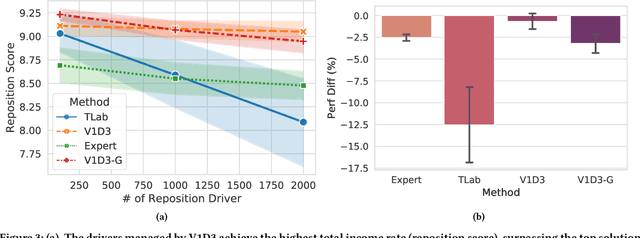
Large ride-hailing platforms, such as DiDi, Uber and Lyft, connect tens of thousands of vehicles in a city to millions of ride demands throughout the day, providing great promises for improving transportation efficiency through the tasks of order dispatching and vehicle repositioning. Existing studies, however, usually consider the two tasks in simplified settings that hardly address the complex interactions between the two, the real-time fluctuations between supply and demand, and the necessary coordinations due to the large-scale nature of the problem. In this paper we propose a unified value-based dynamic learning framework (V1D3) for tackling both tasks. At the center of the framework is a globally shared value function that is updated continuously using online experiences generated from real-time platform transactions. To improve the sample-efficiency and the robustness, we further propose a novel periodic ensemble method combining the fast online learning with a large-scale offline training scheme that leverages the abundant historical driver trajectory data. This allows the proposed framework to adapt quickly to the highly dynamic environment, to generalize robustly to recurrent patterns and to drive implicit coordinations among the population of managed vehicles. Extensive experiments based on real-world datasets show considerably improvements over other recently proposed methods on both tasks. Particularly, V1D3 outperforms the first prize winners of both dispatching and repositioning tracks in the KDD Cup 2020 RL competition, achieving state-of-the-art results on improving both total driver income and user experience related metrics.