 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRight-Side-Out: Learning Zero-Shot Sim-to-Real Garment Reversal
Sep 19, 2025Turning garments right-side out is a challenging manipulation task: it is highly dynamic, entails rapid contact changes, and is subject to severe visual occlusion. We introduce Right-Side-Out, a zero-shot sim-to-real framework that effectively solves this challenge by exploiting task structures. We decompose the task into Drag/Fling to create and stabilize an access opening, followed by Insert&Pull to invert the garment. Each step uses a depth-inferred, keypoint-parameterized bimanual primitive that sharply reduces the action space while preserving robustness. Efficient data generation is enabled by our custom-built, high-fidelity, GPU-parallel Material Point Method (MPM) simulator that models thin-shell deformation and provides robust and efficient contact handling for batched rollouts. Built on the simulator, our fully automated pipeline scales data generation by randomizing garment geometry, material parameters, and viewpoints, producing depth, masks, and per-primitive keypoint labels without any human annotations. With a single depth camera, policies trained entirely in simulation deploy zero-shot on real hardware, achieving up to 81.3% success rate. By employing task decomposition and high fidelity simulation, our framework enables tackling highly dynamic, severely occluded tasks without laborious human demonstrations.
A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive Simulation
Mar 06, 2025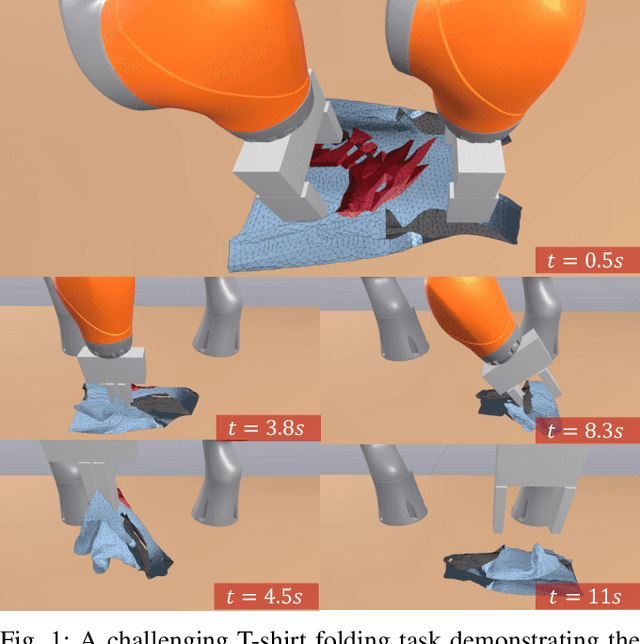
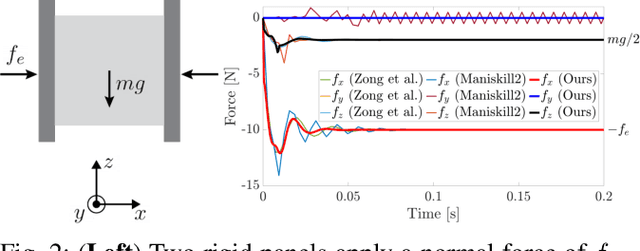
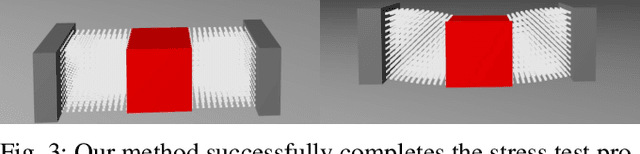
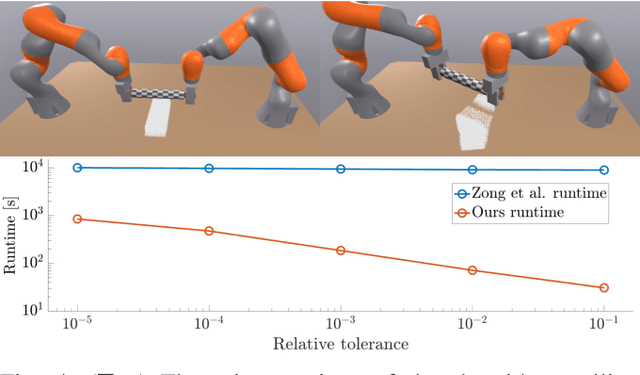
We present a novel convex formulation that weakly couples the Material Point Method (MPM) with rigid body dynamics through frictional contact, optimized for efficient GPU parallelization. Our approach features an asynchronous time-splitting scheme to integrate MPM and rigid body dynamics under different time step sizes. We develop a globally convergent quasi-Newton solver tailored for massive parallelization, achieving up to 500x speedup over previous convex formulations without sacrificing stability. Our method enables interactive-rate simulations of robotic manipulation tasks with diverse deformable objects including granular materials and cloth, with strong convergence guarantees. We detail key implementation strategies to maximize performance and validate our approach through rigorous experiments, demonstrating superior speed, accuracy, and stability compared to state-of-the-art MPM simulators for robotics. We make our method available in the open-source robotics toolkit, Drake.
GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled Grasping
Mar 06, 2025Grasping is fundamental to robotic manipulation, and recent advances in large-scale grasping datasets have provided essential training data and evaluation benchmarks, accelerating the development of learning-based methods for robust object grasping. However, most existing datasets exclude deformable bodies due to the lack of scalable, robust simulation pipelines, limiting the development of generalizable models for compliant grippers and soft manipulands. To address these challenges, we present GRIP, a General Robotic Incremental Potential contact simulation dataset for universal grasping. GRIP leverages an optimized Incremental Potential Contact (IPC)-based simulator for multi-environment data generation, achieving up to 48x speedup while ensuring efficient, intersection- and inversion-free simulations for compliant grippers and deformable objects. Our fully automated pipeline generates and evaluates diverse grasp interactions across 1,200 objects and 100,000 grasp poses, incorporating both soft and rigid grippers. The GRIP dataset enables applications such as neural grasp generation and stress field prediction.
PhysMotion: Physics-Grounded Dynamics From a Single Image
Nov 26, 2024We introduce PhysMotion, a novel framework that leverages principled physics-based simulations to guide intermediate 3D representations generated from a single image and input conditions (e.g., applied force and torque), producing high-quality, physically plausible video generation. By utilizing continuum mechanics-based simulations as a prior knowledge, our approach addresses the limitations of traditional data-driven generative models and result in more consistent physically plausible motions. Our framework begins by reconstructing a feed-forward 3D Gaussian from a single image through geometry optimization. This representation is then time-stepped using a differentiable Material Point Method (MPM) with continuum mechanics-based elastoplasticity models, which provides a strong foundation for realistic dynamics, albeit at a coarse level of detail. To enhance the geometry, appearance and ensure spatiotemporal consistency, we refine the initial simulation using a text-to-image (T2I) diffusion model with cross-frame attention, resulting in a physically plausible video that retains intricate details comparable to the input image. We conduct comprehensive qualitative and quantitative evaluations to validate the efficacy of our method. Our project page is available at: \url{https://supertan0204.github.io/physmotion_website/}.
Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot Manipulation
Sep 24, 2024



Physics-based simulation is essential for developing and evaluating robot manipulation policies, particularly in scenarios involving deformable objects and complex contact interactions. However, existing simulators often struggle to balance computational efficiency with numerical accuracy, especially when modeling deformable materials with frictional contact constraints. We introduce an efficient subspace representation for the Incremental Potential Contact (IPC) method, leveraging model reduction to decrease the number of degrees of freedom. Our approach decouples simulation complexity from the resolution of the input model by representing elasticity in a low-resolution subspace while maintaining collision constraints on an embedded high-resolution surface. Our barrier formulation ensures intersection-free trajectories and configurations regardless of material stiffness, time step size, or contact severity. We validate our simulator through quantitative experiments with a soft bubble gripper grasping and qualitative demonstrations of placing a plate on a dish rack. The results demonstrate our simulator's efficiency, physical accuracy, computational stability, and robust handling of frictional contact, making it well-suited for generating demonstration data and evaluating downstream robot training applications.
VideoPhy: Evaluating Physical Commonsense for Video Generation
Jun 05, 2024



Recent advances in internet-scale video data pretraining have led to the development of text-to-video generative models that can create high-quality videos across a broad range of visual concepts and styles. Due to their ability to synthesize realistic motions and render complex objects, these generative models have the potential to become general-purpose simulators of the physical world. However, it is unclear how far we are from this goal with the existing text-to-video generative models. To this end, we present VideoPhy, a benchmark designed to assess whether the generated videos follow physical commonsense for real-world activities (e.g. marbles will roll down when placed on a slanted surface). Specifically, we curate a list of 688 captions that involve interactions between various material types in the physical world (e.g., solid-solid, solid-fluid, fluid-fluid). We then generate videos conditioned on these captions from diverse state-of-the-art text-to-video generative models, including open models (e.g., VideoCrafter2) and closed models (e.g., Lumiere from Google, Pika). Further, our human evaluation reveals that the existing models severely lack the ability to generate videos adhering to the given text prompts, while also lack physical commonsense. Specifically, the best performing model, Pika, generates videos that adhere to the caption and physical laws for only 19.7% of the instances. VideoPhy thus highlights that the video generative models are far from accurately simulating the physical world. Finally, we also supplement the dataset with an auto-evaluator, VideoCon-Physics, to assess semantic adherence and physical commonsense at scale.
Atlas3D: Physically Constrained Self-Supporting Text-to-3D for Simulation and Fabrication
May 28, 2024



Existing diffusion-based text-to-3D generation methods primarily focus on producing visually realistic shapes and appearances, often neglecting the physical constraints necessary for downstream tasks. Generated models frequently fail to maintain balance when placed in physics-based simulations or 3D printed. This balance is crucial for satisfying user design intentions in interactive gaming, embodied AI, and robotics, where stable models are needed for reliable interaction. Additionally, stable models ensure that 3D-printed objects, such as figurines for home decoration, can stand on their own without requiring additional supports. To fill this gap, we introduce Atlas3D, an automatic and easy-to-implement method that enhances existing Score Distillation Sampling (SDS)-based text-to-3D tools. Atlas3D ensures the generation of self-supporting 3D models that adhere to physical laws of stability under gravity, contact, and friction. Our approach combines a novel differentiable simulation-based loss function with physically inspired regularization, serving as either a refinement or a post-processing module for existing frameworks. We verify Atlas3D's efficacy through extensive generation tasks and validate the resulting 3D models in both simulated and real-world environments.
A Convex Formulation of Frictional Contact for the Material Point Method and Rigid Bodies
Mar 22, 2024



In this paper, we introduce a novel convex formulation that seamlessly integrates the Material Point Method (MPM) with articulated rigid body dynamics in frictional contact scenarios. We extend the linear corotational hyperelastic model into the realm of elastoplasticity and include an efficient return mapping algorithm. This approach is particularly effective for MPM simulations involving significant deformation and topology changes, while preserving the convexity of the optimization problem. Our method ensures global convergence, enabling the use of large simulation time steps without compromising robustness. We have validated our approach through rigorous testing and performance evaluations, highlighting its superior capabilities in managing complex simulations relevant to robotics. Compared to previous MPM based robotic simulators, our method significantly improves the stability of contact resolution -- a critical factor in robot manipulation tasks. We make our method available in the open-source robotics toolkit, Drake.
Gaussian Splashing: Dynamic Fluid Synthesis with Gaussian Splatting
Jan 27, 2024



We demonstrate the feasibility of integrating physics-based animations of solids and fluids with 3D Gaussian Splatting (3DGS) to create novel effects in virtual scenes reconstructed using 3DGS. Leveraging the coherence of the Gaussian splatting and position-based dynamics (PBD) in the underlying representation, we manage rendering, view synthesis, and the dynamics of solids and fluids in a cohesive manner. Similar to Gaussian shader, we enhance each Gaussian kernel with an added normal, aligning the kernel's orientation with the surface normal to refine the PBD simulation. This approach effectively eliminates spiky noises that arise from rotational deformation in solids. It also allows us to integrate physically based rendering to augment the dynamic surface reflections on fluids. Consequently, our framework is capable of realistically reproducing surface highlights on dynamic fluids and facilitating interactions between scene objects and fluids from new views. For more information, please visit our project page at \url{https://amysteriouscat.github.io/GaussianSplashing/}.
PhysGaussian: Physics-Integrated 3D Gaussians for Generative Dynamics
Nov 22, 2023



We introduce PhysGaussian, a new method that seamlessly integrates physically grounded Newtonian dynamics within 3D Gaussians to achieve high-quality novel motion synthesis. Employing a custom Material Point Method (MPM), our approach enriches 3D Gaussian kernels with physically meaningful kinematic deformation and mechanical stress attributes, all evolved in line with continuum mechanics principles. A defining characteristic of our method is the seamless integration between physical simulation and visual rendering: both components utilize the same 3D Gaussian kernels as their discrete representations. This negates the necessity for triangle/tetrahedron meshing, marching cubes, "cage meshes," or any other geometry embedding, highlighting the principle of "what you see is what you simulate (WS$^2$)." Our method demonstrates exceptional versatility across a wide variety of materials--including elastic entities, metals, non-Newtonian fluids, and granular materials--showcasing its strong capabilities in creating diverse visual content with novel viewpoints and movements. Our project page is at: https://xpandora.github.io/PhysGaussian/