 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffPhD: A Unified Differentiable Solver for Projective Heterogeneous Materials in Elastodynamics with Contact-Rich GPU-Acceleration
May 14, 2026Differentiable simulation of soft bodies is a foundation for system identification, trajectory optimization, and Real2Sim transfer. Yet, existing methods such as the differentiable Projective Dynamics (DiffPD) struggle when faced with heterogeneous materials with extreme stiffness contrasts, hyperelasticity under large deformations, and contact-rich interactions, which are common scenarios in the real world. We present DiffPhD, a unified GPU-accelerated differentiable Projective Dynamics framework for heterogeneous materials that tackles these intertwined challenges simultaneously. Our key insight is a careful integration of: (i) stiffness-aware projective weights to embed heterogeneity into the global system; (ii) trust-region eigenvalue filtering lifted to the backward pass for stable hyperelastic gradients and a type-II Anderson Acceleration scheme with dual-gate convergence to stabilize forward iteration under large stiffness contrasts; and (iii) a unified GPU pipeline that reuses a single sparse factor across forward, backward, and contact computations, with stiffness-amplified Rayleigh damping folded into the same factor for heterogeneity-aware dissipation at zero recurring cost. DiffPhD achieves strict gradient accuracy while delivering up to an order-of-magnitude speedup over prior differentiable solvers on heterogeneous, hyperelastic, contact-rich benchmarks. Crucially, this speedup does not come at the cost of stability: DiffPhD remains convergent on stiffness contrasts up to 100x where prior PD solvers degrade. This unlocks end-to-end gradient-based optimization on regimes previously bottlenecked by either solver fragility or per-iteration cost -- shell--joint composite creatures, soft characters wielding stiff weapons, and soft-gripper robotic manipulation -- all handled within a single forward--backward pass.
PhysSkin: Real-Time and Generalizable Physics-Based Animation via Self-Supervised Neural Skinning
Mar 24, 2026Achieving real-time physics-based animation that generalizes across diverse 3D shapes and discretizations remains a fundamental challenge. We introduce PhysSkin, a physics-informed framework that addresses this challenge. In the spirit of Linear Blend Skinning, we learn continuous skinning fields as basis functions lifting motion subspace coordinates to full-space deformation, with subspace defined by handle transformations. To generate mesh-free, discretization-agnostic, and physically consistent skinning fields that generalize well across diverse 3D shapes, PhysSkin employs a new neural skinning fields autoencoder which consists of a transformer-based encoder and a cross-attention decoder. Furthermore, we also develop a novel physics-informed self-supervised learning strategy that incorporates on-the-fly skinning-field normalization and conflict-aware gradient correction, enabling effective balancing of energy minimization, spatial smoothness, and orthogonality constraints. PhysSkin shows outstanding performance on generalizable neural skinning and enables real-time physics-based animation.
Factorized Neural Implicit DMD for Parametric Dynamics
Mar 11, 2026A data-driven, model-free approach to modeling the temporal evolution of physical systems mitigates the need for explicit knowledge of the governing equations. Even when physical priors such as partial differential equations are available, such systems often reside in high-dimensional state spaces and exhibit nonlinear dynamics, making traditional numerical solvers computationally expensive and ill-suited for real-time analysis and control. Consider the problem of learning a parametric flow of a dynamical system: with an initial field and a set of physical parameters, we aim to predict the system's evolution over time in a way that supports long-horizon rollouts, generalization to unseen parameters, and spectral analysis. We propose a physics-coded neural field parameterization of the Koopman operator's spectral decomposition. Unlike a physics-constrained neural field, which fits a single solution surface, and neural operators, which directly approximate the solution operator at fixed time horizons, our model learns a factorized flow operator that decouples spatial modes and temporal evolution. This structure exposes underlying eigenvalues, modes, and stability of the underlying physical process to enable stable long-term rollouts, interpolation across parameter spaces, and spectral analysis. We demonstrate the efficacy of our method on a range of dynamics problems, showcasing its ability to accurately predict complex spatiotemporal phenomena while providing insights into the system's dynamic behavior.
AI-Enhanced Automatic Design of Efficient Underwater Gliders
Apr 30, 2025The development of novel autonomous underwater gliders has been hindered by limited shape diversity, primarily due to the reliance on traditional design tools that depend heavily on manual trial and error. Building an automated design framework is challenging due to the complexities of representing glider shapes and the high computational costs associated with modeling complex solid-fluid interactions. In this work, we introduce an AI-enhanced automated computational framework designed to overcome these limitations by enabling the creation of underwater robots with non-trivial hull shapes. Our approach involves an algorithm that co-optimizes both shape and control signals, utilizing a reduced-order geometry representation and a differentiable neural-network-based fluid surrogate model. This end-to-end design workflow facilitates rapid iteration and evaluation of hydrodynamic performance, leading to the discovery of optimal and complex hull shapes across various control settings. We validate our method through wind tunnel experiments and swimming pool gliding tests, demonstrating that our computationally designed gliders surpass manually designed counterparts in terms of energy efficiency. By addressing challenges in efficient shape representation and neural fluid surrogate models, our work paves the way for the development of highly efficient underwater gliders, with implications for long-range ocean exploration and environmental monitoring.
Learning Object Properties Using Robot Proprioception via Differentiable Robot-Object Interaction
Oct 04, 2024



Differentiable simulation has become a powerful tool for system identification. While prior work has focused on identifying robot properties using robot-specific data or object properties using object-specific data, our approach calibrates object properties by using information from the robot, without relying on data from the object itself. Specifically, we utilize robot joint encoder information, which is commonly available in standard robotic systems. Our key observation is that by analyzing the robot's reactions to manipulated objects, we can infer properties of those objects, such as inertia and softness. Leveraging this insight, we develop differentiable simulations of robot-object interactions to inversely identify the properties of the manipulated objects. Our approach relies solely on proprioception -- the robot's internal sensing capabilities -- and does not require external measurement tools or vision-based tracking systems. This general method is applicable to any articulated robot and requires only joint position information. We demonstrate the effectiveness of our method on a low-cost robotic platform, achieving accurate mass and elastic modulus estimations of manipulated objects with just a few seconds of computation on a laptop.
Reduced-Order Neural Operators: Learning Lagrangian Dynamics on Highly Sparse Graphs
Jul 04, 2024We present a neural operator architecture to simulate Lagrangian dynamics, such as fluid flow, granular flows, and elastoplasticity. Traditional numerical methods, such as the finite element method (FEM), suffer from long run times and large memory consumption. On the other hand, approaches based on graph neural networks are faster but still suffer from long computation times on dense graphs, which are often required for high-fidelity simulations. Our model, GIOROM or Graph Interaction Operator for Reduced-Order Modeling, learns temporal dynamics within a reduced-order setting, capturing spatial features from a highly sparse graph representation of the input and generalizing to arbitrary spatial locations during inference. The model is geometry-aware and discretization-agnostic and can generalize to different initial conditions, velocities, and geometries after training. We show that point clouds of the order of 100,000 points can be inferred from sparse graphs with $\sim$1000 points, with negligible change in computation time. We empirically evaluate our model on elastic solids, Newtonian fluids, Non-Newtonian fluids, Drucker-Prager granular flows, and von Mises elastoplasticity. On these benchmarks, our approach results in a 25$\times$ speedup compared to other neural network-based physics simulators while delivering high-fidelity predictions of complex physical systems and showing better performance on most benchmarks. The code and the demos are provided at https://github.com/HrishikeshVish/GIOROM.
Neural Stress Fields for Reduced-order Elastoplasticity and Fracture
Oct 26, 2023
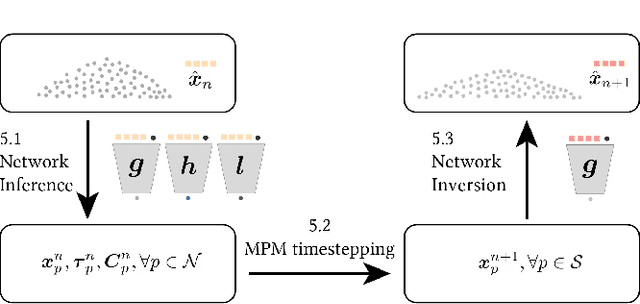
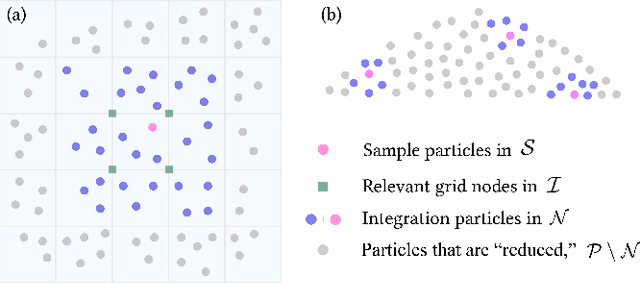
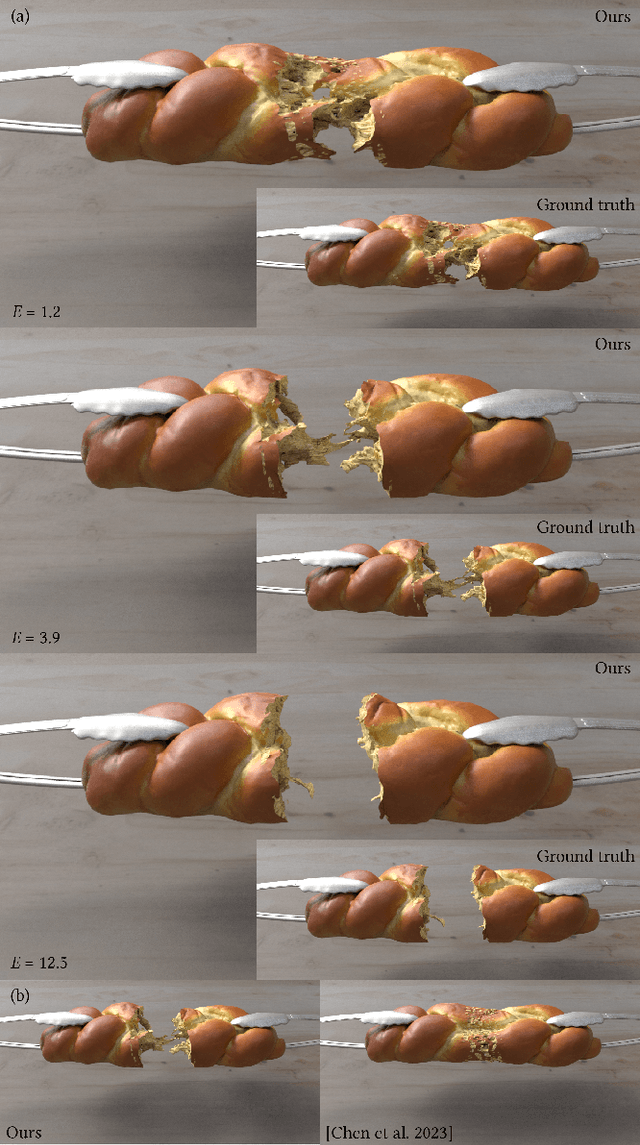
We propose a hybrid neural network and physics framework for reduced-order modeling of elastoplasticity and fracture. State-of-the-art scientific computing models like the Material Point Method (MPM) faithfully simulate large-deformation elastoplasticity and fracture mechanics. However, their long runtime and large memory consumption render them unsuitable for applications constrained by computation time and memory usage, e.g., virtual reality. To overcome these barriers, we propose a reduced-order framework. Our key innovation is training a low-dimensional manifold for the Kirchhoff stress field via an implicit neural representation. This low-dimensional neural stress field (NSF) enables efficient evaluations of stress values and, correspondingly, internal forces at arbitrary spatial locations. In addition, we also train neural deformation and affine fields to build low-dimensional manifolds for the deformation and affine momentum fields. These neural stress, deformation, and affine fields share the same low-dimensional latent space, which uniquely embeds the high-dimensional simulation state. After training, we run new simulations by evolving in this single latent space, which drastically reduces the computation time and memory consumption. Our general continuum-mechanics-based reduced-order framework is applicable to any phenomena governed by the elastodynamics equation. To showcase the versatility of our framework, we simulate a wide range of material behaviors, including elastica, sand, metal, non-Newtonian fluids, fracture, contact, and collision. We demonstrate dimension reduction by up to 100,000X and time savings by up to 10X.
How Can Large Language Models Help Humans in Design and Manufacturing?
Jul 25, 2023The advancement of Large Language Models (LLMs), including GPT-4, provides exciting new opportunities for generative design. We investigate the application of this tool across the entire design and manufacturing workflow. Specifically, we scrutinize the utility of LLMs in tasks such as: converting a text-based prompt into a design specification, transforming a design into manufacturing instructions, producing a design space and design variations, computing the performance of a design, and searching for designs predicated on performance. Through a series of examples, we highlight both the benefits and the limitations of the current LLMs. By exposing these limitations, we aspire to catalyze the continued improvement and progression of these models.
Learning Neural Constitutive Laws From Motion Observations for Generalizable PDE Dynamics
Apr 27, 2023



We propose a hybrid neural network (NN) and PDE approach for learning generalizable PDE dynamics from motion observations. Many NN approaches learn an end-to-end model that implicitly models both the governing PDE and constitutive models (or material models). Without explicit PDE knowledge, these approaches cannot guarantee physical correctness and have limited generalizability. We argue that the governing PDEs are often well-known and should be explicitly enforced rather than learned. Instead, constitutive models are particularly suitable for learning due to their data-fitting nature. To this end, we introduce a new framework termed "Neural Constitutive Laws" (NCLaw), which utilizes a network architecture that strictly guarantees standard constitutive priors, including rotation equivariance and undeformed state equilibrium. We embed this network inside a differentiable simulation and train the model by minimizing a loss function based on the difference between the simulation and the motion observation. We validate NCLaw on various large-deformation dynamical systems, ranging from solids to fluids. After training on a single motion trajectory, our method generalizes to new geometries, initial/boundary conditions, temporal ranges, and even multi-physics systems. On these extremely out-of-distribution generalization tasks, NCLaw is orders-of-magnitude more accurate than previous NN approaches. Real-world experiments demonstrate our method's ability to learn constitutive laws from videos.
PAC-NeRF: Physics Augmented Continuum Neural Radiance Fields for Geometry-Agnostic System Identification
Mar 09, 2023Existing approaches to system identification (estimating the physical parameters of an object) from videos assume known object geometries. This precludes their applicability in a vast majority of scenes where object geometries are complex or unknown. In this work, we aim to identify parameters characterizing a physical system from a set of multi-view videos without any assumption on object geometry or topology. To this end, we propose "Physics Augmented Continuum Neural Radiance Fields" (PAC-NeRF), to estimate both the unknown geometry and physical parameters of highly dynamic objects from multi-view videos. We design PAC-NeRF to only ever produce physically plausible states by enforcing the neural radiance field to follow the conservation laws of continuum mechanics. For this, we design a hybrid Eulerian-Lagrangian representation of the neural radiance field, i.e., we use the Eulerian grid representation for NeRF density and color fields, while advecting the neural radiance fields via Lagrangian particles. This hybrid Eulerian-Lagrangian representation seamlessly blends efficient neural rendering with the material point method (MPM) for robust differentiable physics simulation. We validate the effectiveness of our proposed framework on geometry and physical parameter estimation over a vast range of materials, including elastic bodies, plasticine, sand, Newtonian and non-Newtonian fluids, and demonstrate significant performance gain on most tasks.